本文主要是介绍NAO团队任务——阻塞和非阻塞调用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
NAO团队任务——阻塞和非阻塞调用
- 机器人连接
- 阻塞和非阻塞调用
- 任务解析
- 任务1.1
- 题目:使虚拟机器人移动到正前方一米距离,并且在移动过程中每隔 0.5s 重复说一句话,说五遍,内容自定义。
- 代码
- 任务1.2
- 题目:使虚拟机器人移动到右侧一米距离,并且在移动后说一句话,内容自定义。
- 代码①
- 代码②
- 遇到过的BUG
机器人连接
示例:
from naoqi import ALProxy
motion = ALProxy('ALMotion', '127.0.0.1', 9559)
上述代码中,ALProxy类用于创建模块的代理对象。ALMotion是运动模块,‘127.0.0.1’, 9559分别为IP和端口号。
虚拟机器人的默认IP和端口号为’127.0.0.1’, 9559。
若是实体机器人,可以在choregrahe中查看:
连接→连接至,就会出现窗口: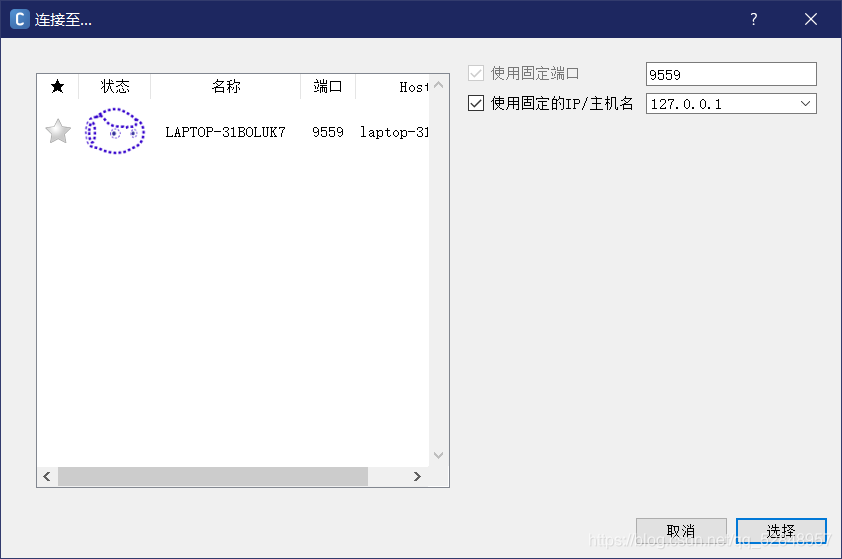
选择固定IP地址连接时,端口号默认9559
同时,也可以选择固定端口号连接,端口号查询方法:
编辑→首选项→虚拟机器人
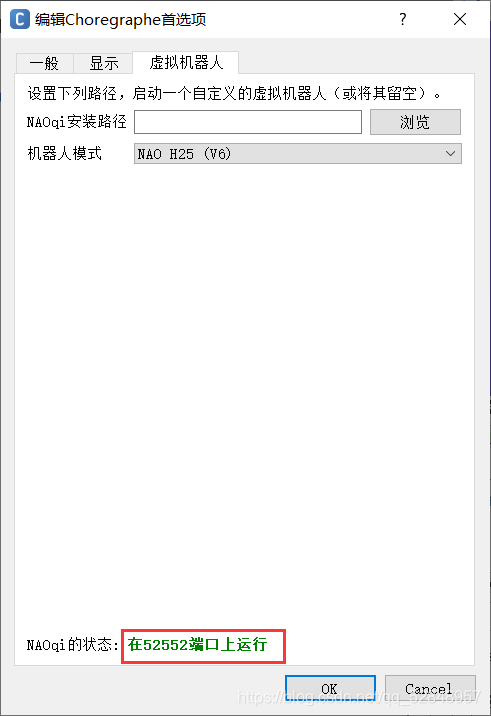
这里,端口号就是52552。
阻塞和非阻塞调用
NAOqi的方法从调用时间上看大体可以分为两类,如读传感器状态getData()方法(属于ALMemory模块)可以很快完成,而让机器人移动到某个位置的move()方法(属于ALMotion模块)要执行很长时间。在move()方法调用过程中,机器人可能还需要做其他的事,如用“眼睛”看,或者“说话”,因此,在调用move()方法时,还需要同时调用其他方法。NAOqi提供了如下两种调用方式。
(1)阻塞调用。阻塞调用是指调用结果返回之前,调用者回进入阻塞状态等待。只有在得到结果之后才会返回。也就是说,在顺序结构的程序中,只有在前一个调用结束后才能执行下一条语句。
所有的阻塞调用都可以引发异常,应该使用try-catch结构捕获异常。调用可以有返回值。
对于NAOqi任何阻塞调用方法,如果使用Proxy的post对象进行调用,将在并行线程中创建任务,这样可以同时执行后面的语句。
注:等于把阻塞调用变成了非阻塞调用。
(2)非阻塞调用。指在不能立刻得到结果之前,该方法不会阻塞当前线程,而会立刻返回。这样就可以继续执行下面的语句。
任务解析
任务1.1
题目:使虚拟机器人移动到正前方一米距离,并且在移动过程中每隔 0.5s 重复说一句话,说五遍,内容自定义。
代码
from naoqi import ALProxy
import time
motion = ALProxy("ALMotion","127.0.0.1",9559)
tts = ALProxy("ALTextToSpeech","127.0.0.1",9559)
#设定全身关节的刚度,刚度为0时关节做不了任何运动,非阻塞调用。
motion.setStiffnesses("Body",1.0)
time.sleep(1.0)
#阻塞调用方法,完成机器人行走前的准备动作。
motion.moveInit()
#moveTo()本身为阻塞调用方法,但使用post调用moveTo()方法
#将创建新的并行线程(即后面的“说话”进程)。这样就可以一边走一边说话了。
#如果用motion.moveTo(),会走完之后再说话。
motion.post.moveTo(1,0,0)
for i in range(5):tts.say("hello world")time.sleep(0.5)
任务1.2
题目:使虚拟机器人移动到右侧一米距离,并且在移动后说一句话,内容自定义。
代码①
from naoqi import ALProxy
import time
motion = ALProxy("ALMotion","127.0.0.1",9559)
tts = ALProxy("ALTextToSpeech","127.0.0.1",9559)
motion.setStiffnesses("Body",1.0)
time.sleep(1.0)
motion.moveInit()
motion.post.moveTo(0,1,0)
#等待,直到行走任务完成。用于阻塞程序向下运行直到行走任务结束
motion.waitUntilMoveIsFinished()
tts.say("I'm done")
代码②
from naoqi import ALProxy
import time
motion = ALProxy("ALMotion","127.0.0.1",9559)
tts = ALProxy("ALTextToSpeech","127.0.0.1",9559)
motion.setStiffnesses("Body",1.0)
time.sleep(1.0)
motion.moveInit()
#阻塞调用,只有在动作结束后才会进行下一步进程。
motion.moveTo(0,1,0)
tts.say("I'm done")
两种实现形式皆可。
遇到过的BUG
1.如果不将机器人停下来,就擅自关闭choregrahe程序,再次打开choregrahe,即使端口号和IP地址正确,Python依旧会报错,无法连接至机器人。
建议使用try-catch捕捉异常。
文:齐鲁工业大学 云灵未来人工智能协会 AIDC011
这篇关于NAO团队任务——阻塞和非阻塞调用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





