motor专题

【fastapi+mongodb】使用motor操作mongodb(二)
这篇文章本来要介绍valgrind的,但是valgrind只能安装在 Linux 上,不得已,就继续上一篇文章写motor的用法。 如果你还没看过上一篇文章,地址在这:【fastapi+mongodb】使用motor操作mongodb select 删除和修改都是基于查询的语法的。 使用 find_one() 得到匹配查询的第一个文档: async def find_user_by_nam
【fastapi+mongodb】使用motor操作mongodb
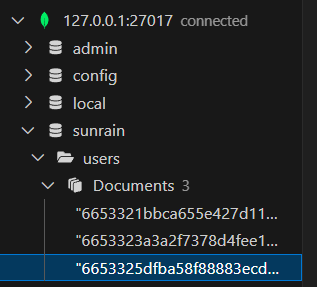
上一篇文章,我们在电脑上安装了mongodb数据库。这篇文章,我们在fastapi后端使用motor操作mongodb 如果你还没看过上一篇文章,链接在这里:【MongoDB】安装与使用 安装 motor motor 是一个用于操作 mongodb 数据库的 python 库,它封装了 pymongo 库,让其使用起来更加方便。执行下面的命令安装 motor: pip install -i
MOTOR-STEPP(步进电机)
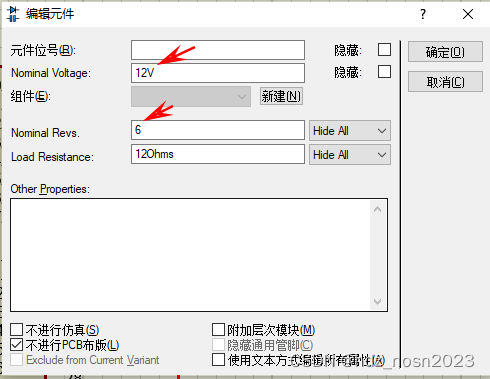
工具 1.Proteus 8 仿真器 2.keil 5 编辑器 原理图 讲解 简介 步进电机是一种将电脉冲转换为角位移的开环控制元步进电机。当步进驱动器接收到脉冲信号时,它将根据设定方向(即步进角)驱动步进电机旋转一定角度。 可以通过控制脉冲量来控制角位移量,从而达到精确定位的目的,同时还可以通过控制脉冲频率来控制电机的转速和加速度,从而达到速度控制的目的。 分类 永磁体(
![CCS中gmake: *** [include/motor.obj] Error 1错误怎么解决](/front/images/it_default.gif)
CCS中gmake: *** [include/motor.obj] Error 1错误怎么解决
对于 CCS 中的 "gmake: *** [include/motor.obj] Error 1" 错误,这通常表示编译过程中发生了错误。您可以尝试以下几种方法来解决这个问题: 检查代码:首先,请确保您的代码没有语法错误或其他常见的编译错误。仔细检查相关代码行,特别是与 "motor.obj" 相关的部分,以查找任何潜在的问题。 检查文件路径:确保在您的项目中正确设置了 "motor.ob
Debian11下编译ADAravis和Motor模块的一条龙过程
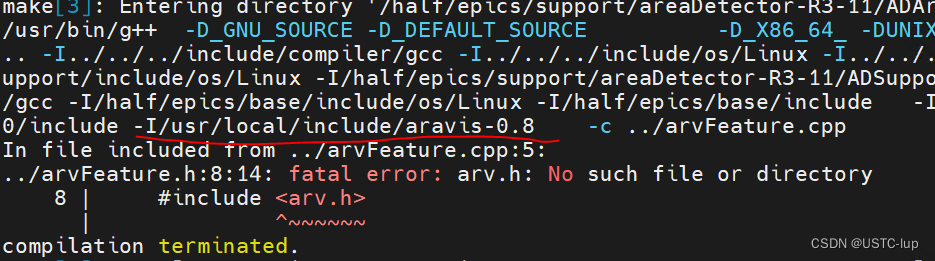
Debian11编译EPICS ADAravis记录 一年前整理的上面文,这几天重新走了一遍,有些地方会碰到问题,需要补充些环节,motor模块以前和areaDetector一条龙编译时,总是有问题,当时就没尝试了,这几天尝试了一下,流程再总结如下: 准备: Debian11的基础安装(我用的是网络安装的虚拟机,选安装包时选ssh服务和网络工具两个选项),git抓包需要自己找渠道设置环境变量

让马达转动起来(motor)
代码: #include "reg51.h"sbit P2_0 = P2^0;sbit P2_7 = P2^7;void main(){while(1){P2_0 = 1;P2_7 = 0;}} 仿真: 介绍: 当2.0和2.7端口均为低电平或高电平时,马达保持不转动; 当2.0和2.7端口分别为高电平和低电平时,马达顺时针转动; 当2.0和2.7端口分别为低电平和高电

【Proteus仿真】51单片机+DC MOTOR PWM调速实验二
【Proteus仿真】51单片机+DC MOTOR PWM调速实验二 📍相关篇《【Proteus仿真】51单片机+直流电机PWM调速实验》 📓功能说明 通过按键控制启停以及PWM,LCD1602显示当前PWM占空比,以及运行状态。 📝main控制程序 #include <reg52.h>#include
LeJOS学习(5):Motor的API研究-进阶篇
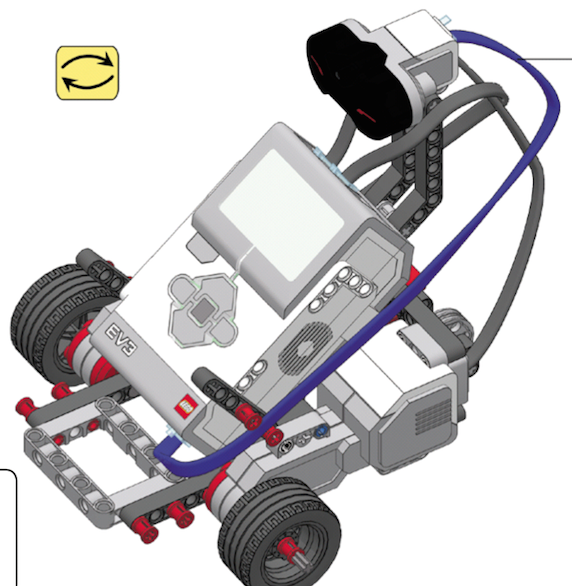
书接上回,看看API中几个比较酷的东西。 我们这回真需要弄一个小车子来测试我们的高级API了,我参考这本书《The LEGO MINDSTORMS EV3 Discovery Book》做了这么一个小车,见下图: 1,同时操作两个轮子的方法 Synchronization 前面我们说的都是让一个马达转起来的方法,但小车有两个轮子,如何做到同步?请参看如下代码 Motor
LeJOS学习(4):Motor的API研究
从最简单的马达开始学习,LCD个人感觉没啥可用的,又小又是单色,所以直接忽略。 首先可以组装一辆小车,其实现阶段,完全可以使用数据线直接马达与主机,没有太多必要去搭建模型。所以,这一步是可以略过的。 我们直接将大型马达连在主机的A口和B口上,即可开始本文的学习。 1,获取马达的实例 //方法1:标准RegulatedMotor motor = new EV3LargeRegulatedM
RT-Thread Hoist_Motor PID
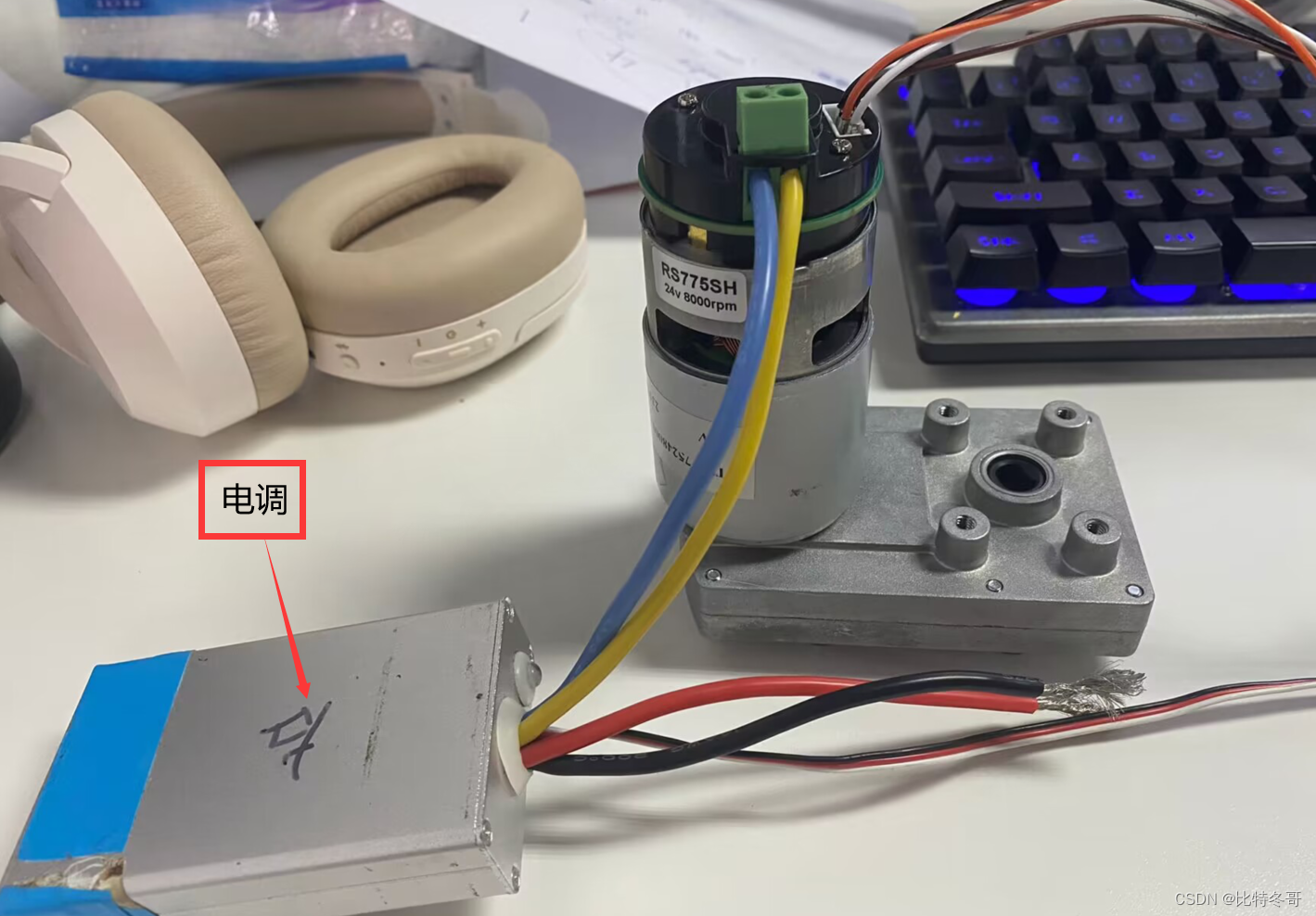
本节介绍的是一个举升电机,顾名思义,通过转轴控制物体升降,为双通道磁性译码器,利用电调进行操控,具体驱动类似于大学期间最大众的SG180°舵机,在一定的频率下,通过调制脉宽进行控制。 设备介绍 具体实控 例如在50Hz情况下,即周期为20ms ①驱动信号区间: 区间一(0.5ms-1.5ms )和区间二(1.5ms-2.5ms ) (注意都是开区间且存在死区) ②其中区间一和区间二分别表示
Motor CAD脚本导入Maxwell相关说明
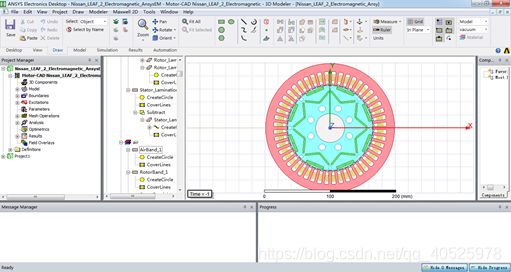
Motor CAD脚本导入Maxwell相关说明 导入步骤 以一款尼桑电动汽车电机为例,软件版本为Motor CAD12.1.7导入流程如下。 主界面文件选项卡–导出几何模型—ANSYS Electrics Desktop。 选择导出文件位置,点击Export即可。 注意事项 在最新版本Ansys Motor CAD13.0当中脚本文件导出时有更多选项,包括选择模型周期,是否自动求解。
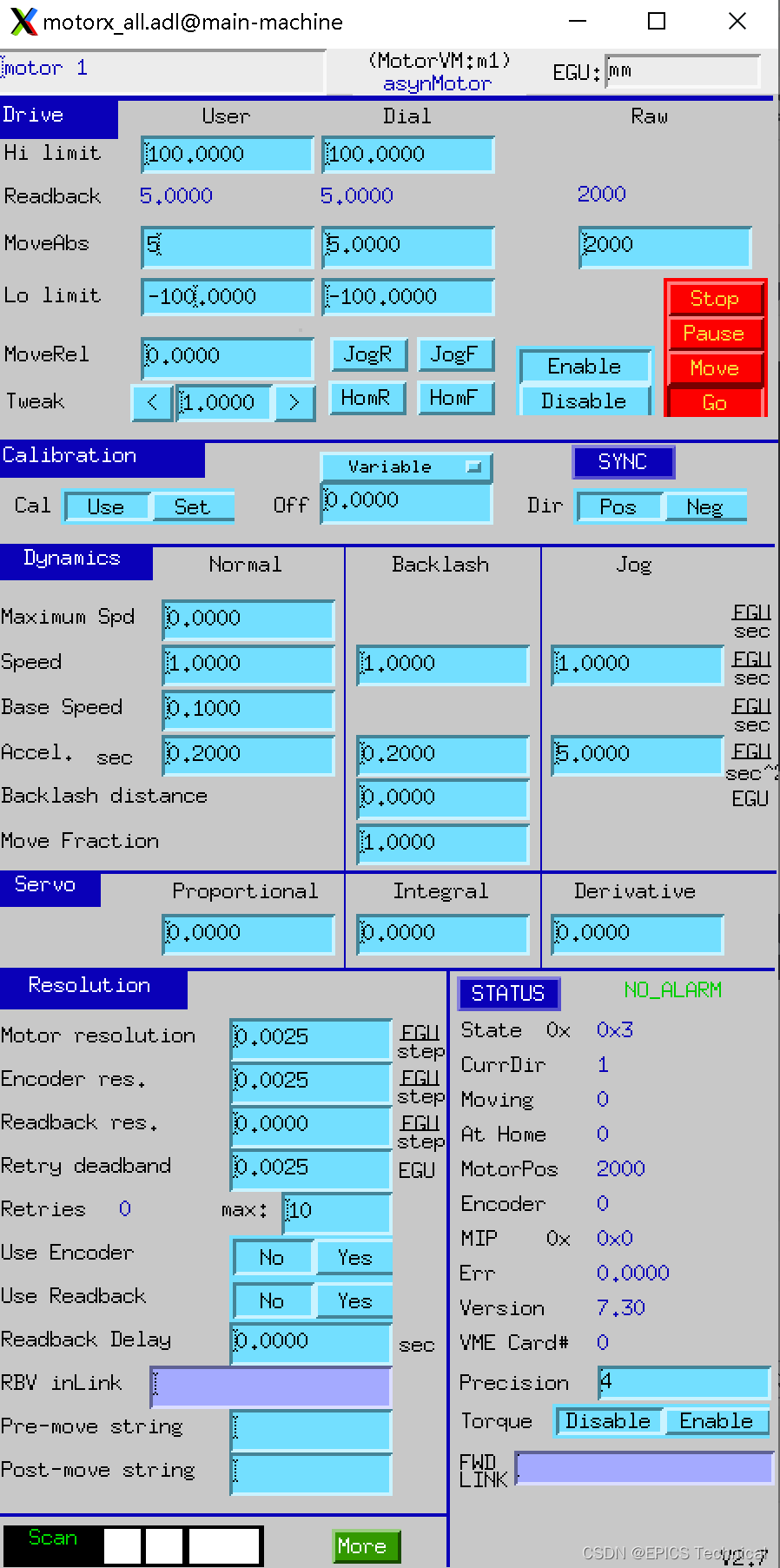
EPICS motor驱动程序实例
本驱动程序是控制https://blog.csdn.net/yuyuyuliang00/article/details/132483050中描述的模拟电机控制器。其余基于字符串通信方式的电机控制器,都可以使用这个模板进行修改,开发对应的EPICS电机驱动程序。 源程序如下: 头文件vm.h: #include "asynMotorController.h"#include "asynMot