lin专题

LIN协议栈 AUTOSAR架构下 状态管理
一、LIN State Manager 概述 功能 :负责控制 LIN 总线的通信状态,包括切换调度表(仅 LIN 主节点)、处理睡眠和唤醒操作、通知上层新状态等。约束 :每个 ECU 中最多有一个实例;所有关于调度表的操作仅适用于 LIN 主节点;适用于所有使用 LIN 的汽车领域。依赖关系 :依赖于 Communication Manager(ComM)和 LIN Interface(Lin

LIN总线CAPL函数—— 更新特定报文数据(linUpdateResponse)
🍅 我是蚂蚁小兵,专注于车载诊断领域,尤其擅长于对CANoe工具的使用🍅 寻找组织 ,答疑解惑,摸鱼聊天,博客源码,点击加入👉【相亲相爱一家人】🍅 玩转CANoe,博客目录大全,点击跳转👉 linResetRespBaudrate函数用于更新一个从节点的数据,语法如下 激活LIN从节点,使LIN从节点报文周期发送,如下图0x23 报文的默认数据如下: 通
LIN诊断(4)——Tp层函数LINtp.dll应用
🍅 我是蚂蚁小兵,专注于车载诊断领域,尤其擅长于对CANoe工具的使用🍅 寻找组织 ,答疑解惑,摸鱼聊天,博客源码,点击加入👉【相亲相爱一家人】🍅 玩转CANoe,博客目录大全,点击跳转👉 在不使用cdd/pdx等诊断数据库的情况下,用户可以使用LINtp.dll文件实现LIN总线的诊断通信在LINtp.DLL文件中封装的函数如下图所示 以下测试基于主节点仿真,从
LIN诊断(3)—— 传输层诊断协议(LINTP)
🍅 我是蚂蚁小兵,专注于车载诊断领域,尤其擅长于对CANoe工具的使用🍅 寻找组织 ,答疑解惑,摸鱼聊天,博客源码,点击加入👉【相亲相爱一家人】🍅 玩转CANoe,博客目录大全,点击跳转👉 目录 ISO-17987-2协议数据单元类型(Protocol data unit types)PDU报文格式Address information (N_AI)Protoco
![[vulnhub]Lin.Security主机Linux提权](https://img-blog.csdnimg.cn/img_convert/3ad56ff0f87f1cb255c558799e9d9012.jpeg)
[vulnhub]Lin.Security主机Linux提权
Hash Crack(Hash cat) bob@linsecurity:~$ cat /etc/passwd $ echo "AzER3pBZh6WZE">hash 检查哈希类型: $ hash-identifier AzER3pBZh6WZE $ hashcat -m 1500 -a 0 hash /usr/share/wordlists/rockyou.txt --forc

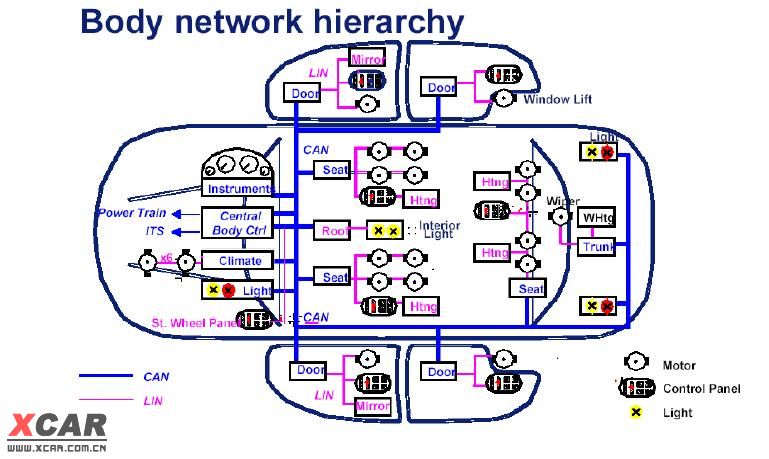
汽车电子学习【车载网络CAN/LIN】
车载网络CAN/LIN知识总结 STM32F1开发板测试 STM32测试程序 /** CAN 通信报文内容设置*/void CAN_SetMsg(void){#if CAN_STDTxMessage.StdId = 0x12;TxMessage.IDE = CAN_ID_STD;#elseTxMessage.ExtId = 0x1314; //使用的扩展IDTxMessage

Kernighan-Lin算法
注意:之前对于公式用LATEX编写,复制的图片,不知怎么就显示不出,凡是框框的地方,用文字表示了公式。 Kernighan-Lin算法是一种启发式算法,基于贪婪原理将网络划分为两个大小已知的社团。 所要解决的问题描述:给定一个无向带权图G=(V,E,C),其中V为一含有2n个节点的集合,E为边集合,C为2n*2n且对称的权重矩阵(Cij表示节点i和节
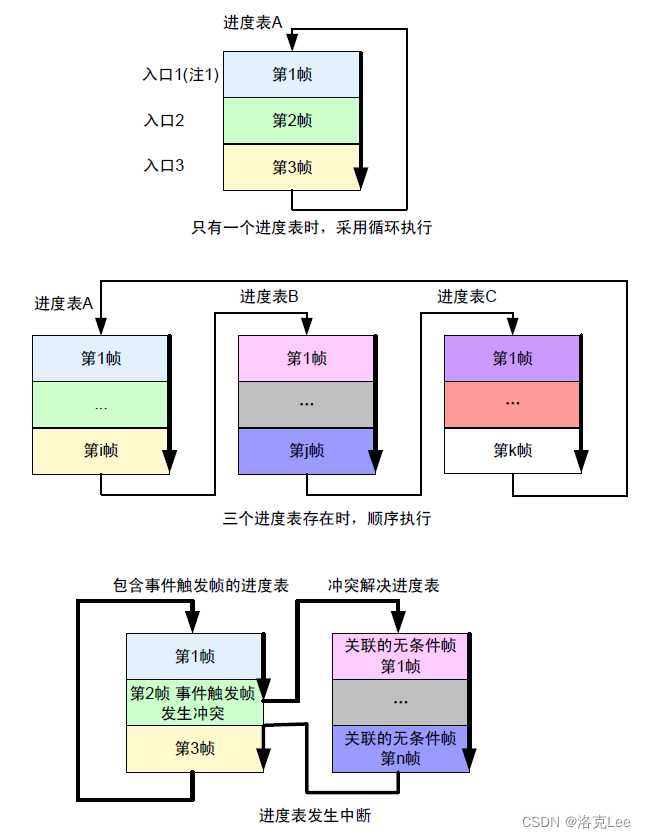
LIN线调度表测试-顺序 时隙
文章目录 "slot delay"(时隙延迟)jitter 抖动时间故障示例 “slot delay”(时隙延迟) 在 LIN 总线中,“slot delay”(时隙延迟)指的是分配给发送报文的时间隙。不同的报文可能有不同的发送时隙,这个时隙延迟决定了报文可以被发送的时间。 LIN 协议是一种主从结构的通信协议,通信只能由主机节点发起。主机任务负责发送报头,从机任务根据

LIN协议栈代码解读,纯干货
LIN协议栈概述 当前用的比较多的LIN协议栈,如果不是VECTOR平台的,那就是NXP的LIN协议栈。NXP的协议栈又分为两套,一套是独立工具生成配置文件,即STACK_Package_4.5.9,通过NCFGui生成配置文件,主要用在MC9S12系列。另外一套就是集成在S32DS sdk中,通过PE配置。两套协议栈比较类似。这里主要记录下LIN协议栈的整体架构和一些重点。 架构简述 每种
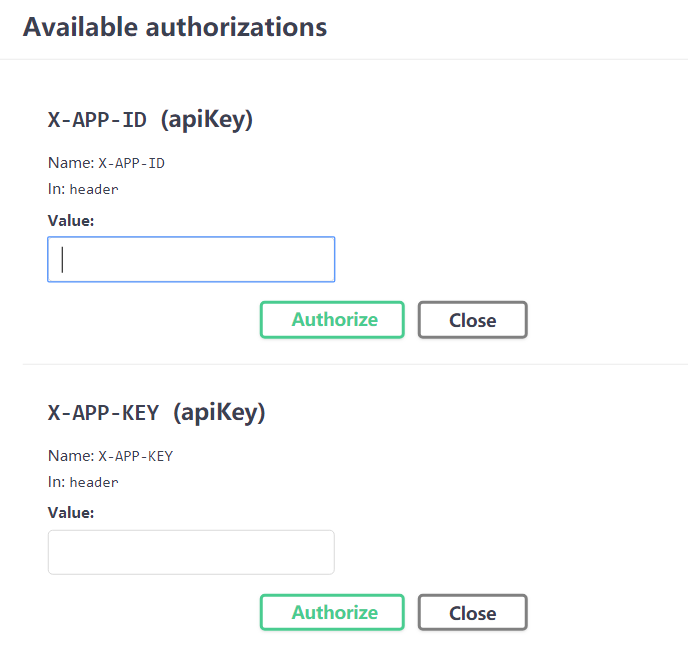
javalin实现restful接口并集成swagger设置header字段
javalin实现restful接口并集成swagger设置header字段 配置依赖 dependencies {implementation fileTree(dir: "lib", include: ['*.jar'])implementation 'cn.hutool:hutool-all:5.3.5'implementation 'io.javalin:javalin-bund

CANoe中LIN工程主节点的配置(如何切换调度表)
1:前置条件 1)工程已经建立,simulation窗口已经配置好(包括且不限于通道mappin好,数据库文件已经添加) 2)我已系统自带sampleCfg工程,作为例子。如下图 2 :主节点的配置 右键单击I-Generator节点(需要知道:图形化界面自动生成的过程中,会自动生成一个主节点的IG界面,也可以这样理解,调度表也是通过一个IG界面发送的)。选择Configurati
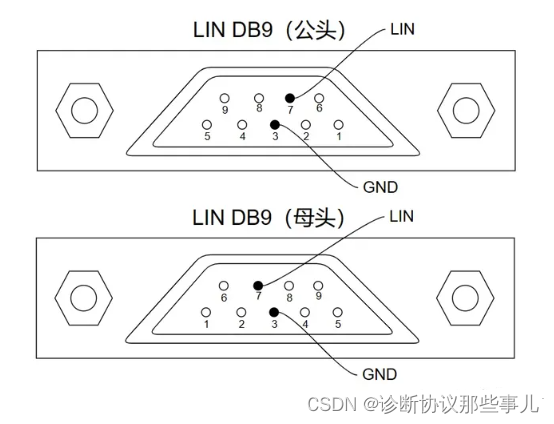
CAN和LIN的DB9接口定义
文章目录 前言一、DB9实物及引脚二、LIN DB9三、CAN DB9总结 前言 在日常汽车总线测试中,最主要的通信网络就是CAN网络,小伙伴们在测试时,经常会遇到使用DB9插头来测试、录取CAN总线报文,但是DB9插头内有9个插针,哪2个才是CAN-H和CAN-L呢? 一、DB9实物及引脚 DB9 接口是一种常见的 D 型连接器,具有 9 个针脚。它通常用于连接串行通信

Lin-ui环境搭建(npm安装)
一、安装Node.js Node.js地址:https://nodejs.org/en/ (共两个版本,分别为Windows和macOS,还有一个源码,当然新手不推荐使用源码,直接根据自己的电脑系统选择合适的版本直接安装就行了,傻瓜式安装,一直next就行了,如果不想放在系统盘记得改一下安装路径。) 二、使用npm安装 打开小程序的项目根目录,执行下面的命令(如果使用了云开发

51nod 1839 Lin的游戏
1839 Lin的游戏 1.0 秒131,072.0 KB160 分6级题 在51nod上面一道冷门题 观前提示:本文章内使用的编程语言是c++,且代码毫无可读性就像爪子用狗刨的,请慎重观看 首先我们可以知道以下信息: 根据数据范围n*d+6位小数=17位,所以需要开限时为1s,所以最差时间复杂度为Lin只知道自己在当前回合所选的数字在所有已选过的数字里有多大Lin的选择只和当前回

Autosar MCAL配置——Lin
目录 前言一、配置DEM参数二、LinGeneral三、配置Lin通道 前言 Lin总线是主从模式,且属于低成本单总线,在汽车上主要使用在车窗、车门、天窗等小控制器上,且这些小产品作为Slave,基本是不会跑AutoSAR软件,因此基本上只有Master会跑AutoSAR(Slave也会有Autosar,采购时需要明确主从),本文讲Lin Master在AutoSAR上应用。

Spring 被打暴了! vs Javalin vs Solon
测试仅供参考。不同的环境、场景,效果会不同。 测试记录: 项目SpringBoot2SpringBoot3JavalinSolon运行时java 17java 17java 17java 17测试前状态/内存101.1Mb112.9Mb66.1Mb45.6Mb测试后状态/内存996.3Mb326.9Mb457.3Mb369.2Mb测试后状态/并发2万2.6万12万17万 测试评语: Spr
一文梳理LIN协议与应用
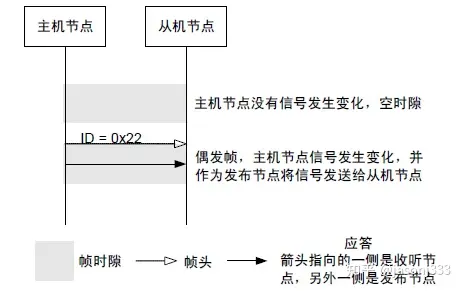
目录 一、LIN是什么?有什么用?二、LIN概要描述2.1 特点2.1.1 低成本2.1.2 易扩展2.1.3 速率一般,不高 2.2 网络形态2.3 架构分层 三、应用层 4 大功能3.1 配置3.2 识别(查询功能)3.3 信号处理3.4 诊断 四、协议层介绍4.1 帧的结构4.2 帧的类型4.2.1 信号携带帧——无条件帧(Unconditional Frame)4.2.2 信号携带帧
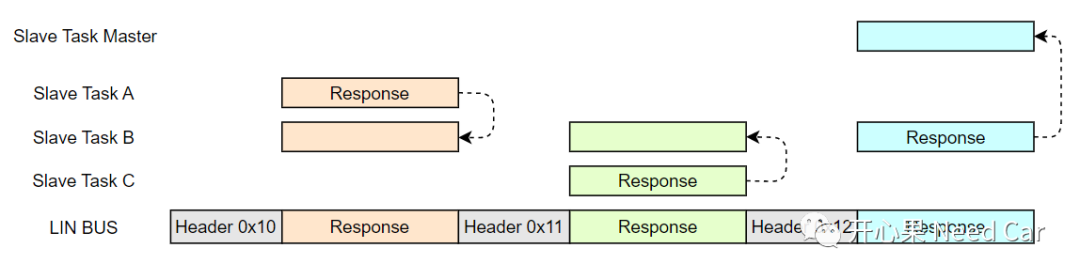
LIN基础:从LIN Frame开始
目录: 1、LIN的网络拓扑 2、LIN Frame 1)Header 2)Response 3、LIN的通信规则 1)LIN的发送行为示例 2)LIN的接收行为示例 虽然LIN总线的通信速率不高,工程中,最高的速率也就19200bps。但是,LIN总线依然在整车拓扑(汽车电子知识汇总)中被广泛使用,为什么呢?答:成本。LIN总线,作为CAN总线的补充衍生而来。对于一些实时
有关CAN-BUS与LIN-BUS的区别 !
对于CAN在汽车上的应用,具有很多行业标准或者是国际标准,比如国际标准化组织(International Organization for Standardization)的ISO11992、ISO11783以及汽车工程协会(Society of Automotive Engineers )的SAE J1939。CAN总线已经作为汽车的一种标准设备列入汽车的整体设计中。 过下图可以看到,蓝

STM32CubeIDE TFT-LCD移植STemWin,直接线性访问(LIN)驱动器
随言: STemWin、emWin 与ucGUI其实都师出同门,都是是Segger 公司之手。 STemWin 是Segger 公司为ST公司定制的图形软件库;uC/GUI 是Segger 公司为Micrium 公司定制的图形软件库; 与其说是花钱定制的版本,其实都是正统emWin的别名版本,微改动。 但是在STM32芯片上面使用STemWin是免费的。当然ST公司也不会给其他芯片使用ST
Vector - CANoe - LIN一致性测试
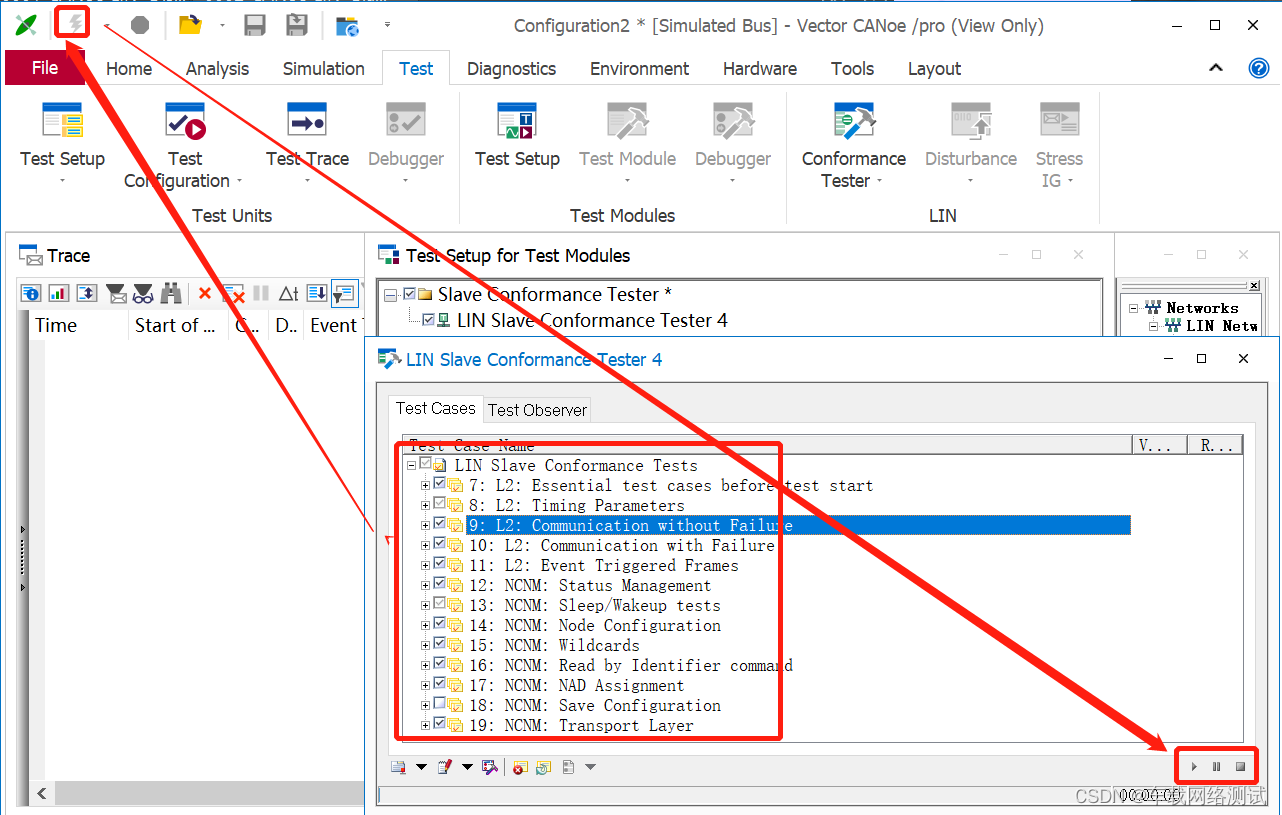
目录 LIN Slave Conformance Tester内容: 一、创建CANoe LIN工程 1、打开CANoe软件,创建LIN工程 2、添加LDF文件 3、在CAN总线上屏蔽节点模块 4、硬件通道选择 5、配置LIN通信信息配置 二、添加LIN Slave Conformance Tester测试模块 1、添加Test Setup for Test Module
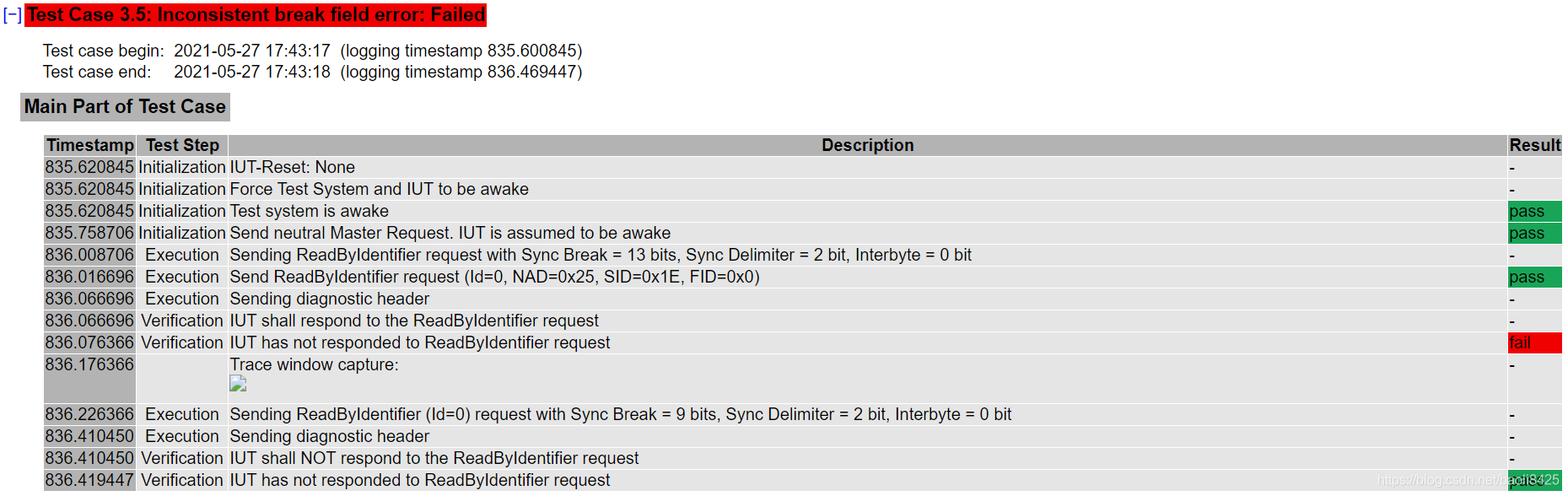
使用CANoe进行LIN Slave Conformance Test
使用CANoe进行LIN Slave Conformance Test Step 1. 配置硬件工具Step 2. 添加测试模块Step 3. 配置测试模块Step 4. 运行测试环境Step 5. 查看测试报告 LIN2.1测试标准链接: https://download.csdn.net/download/baoli8425/19256539? Step 1. 配置硬件工
林达华 Dahua Lin 对数学的新思考
在过去的一年中,我一直在数学的海洋中游荡,research进展不多,对于数学世界的阅历算是有了一些长进。 为什么要深入数学的世界 作为计算机的学生,我没有任何企图要成为一个数学家。我学习数学的目的,是要想爬上巨人的肩膀,希望站在更高的高度,能把我自己研究的东西看得更深广一些。说起来,我在刚来这个学校的时候,并没有预料到我将会有一个深入数学的旅程。我的导师最初希望我去做的题目,是对
LIN总线与CAN总线的传输方式有什么不同?
关注菲益科公众号—>对话窗口发送 “CANoe ”或“INCA”,即可获得canoe入门到精通电子书和INCA软件安装包(不带授权码)下载地址。 LIN,Interconnect Network,适用于速度和可靠性要求不高、低成本的场合,LIN的使用场景包括车窗、天窗、座椅、门锁、空调、照明等舒适性相关的地方 LIN网络 主机节点/从机节点 不同协议的网络需要网关相连接,所以L

python计算不规则闭合区域的面积_Python:计算不规则轮廓lin内的面积
我试图在Python2.7中计算等高线内的面积。它是一个不规则区域,如下所示: 基本上,我将轮廓的路径保存在以下路径中,并加载它:AoI_saved=np.load('C:\Users\Roberta\Desktop\Analysis\Pilot2\AoI\AoI_Lev1_'+pict[:-4]+'.npy') 我可以在同一个文件中保存一个、两个或多个轮廓。对于由等高线定义的每个区域,我都要
车载通信架构 —— 传统车内通信网络LIN总线(低成本覆盖低速场景)
车载通信架构 —— 传统车内通信网络LIN总线(低成本覆盖低速场景) 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 屏蔽力是信息过载时代一个人的特殊竞争力,任何消耗你的人和事,多看一眼都是你的不对。非必要不费力证明自己,无利益不试图说服别人,是精神上的节能减排。 无人问津也好,技不如人也罢,你都要试着安静下来,去做自