本文主要是介绍有关CAN-BUS与LIN-BUS的区别 !,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
对于CAN在汽车上的应用,具有很多行业标准或者是国际标准,比如国际标准化组织(International Organization for Standardization)的ISO11992、ISO11783以及汽车工程协会(Society of Automotive Engineers )的SAE J1939。CAN总线已经作为汽车的一种标准设备列入汽车的整体设计中。
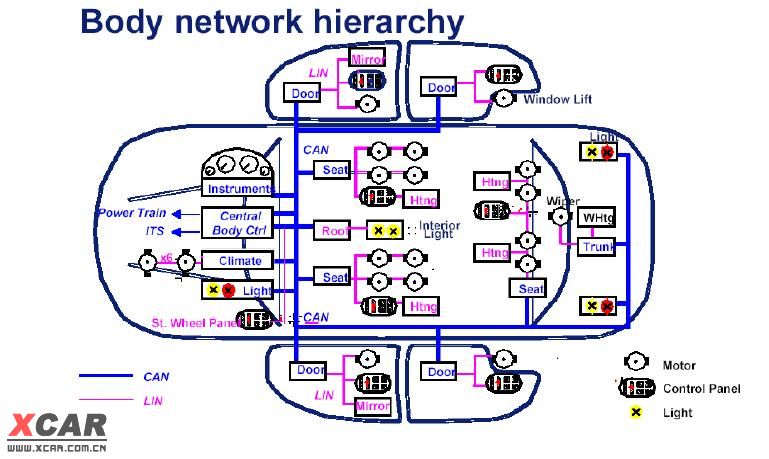
过下图可以看到,蓝色较粗线代表CAN总线,它连接了传动装置控制单元、灯控单元、门控单元、座椅控制单元以及仪表盘控制单元等等。红色较细线代表LIN总线,由LIN总线构成的LIN网络作为CAN网络的辅助网络,连接了车窗控制单元、雨刷控制单元、天窗控制单元等低速设备。
LIN网络(Local Interconnect Network),由汽车厂商为汽车开发,作为CAN网络的辅助网络,目标应用在低端系统,不需要CAN的性能、带宽以及复杂性。LIN的工作方式是一主多从,单线双向低速传送数据(最高20K位/秒),与CAN相比具有更低的成本,且基于UART接口,无需硬件协议控制器,使系统成本更低。
下图是PHILIPS半导体公司的汽车网络解决方案。
这篇关于有关CAN-BUS与LIN-BUS的区别 !的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





