kf专题
Single-Head ViT;Faster Whisper;Transformer KF;Pick-and-Draw
本文首发于公众号:机器感知 Single-Head ViT;Faster Whisper;Transformer KF;Pick-and-Draw SHViT: Single-Head Vision Transformer with Memory Efficient Macro Design Recently, efficient Vision Transformers have s

Leetcode|460. LFU 缓存(KV+KF+FK哈希链表+minFreq)
相关题目 《Leetcode|146. LRU 缓存机制(key2node哈希链表)》 《Leetcode|460. LFU 缓存(KV+KF+FK哈希链表+minFreq)》 解题逻辑 这道题虽然不难,但是逻辑较多,第一次手撕时由于漏掉2个逻辑没有AC,后来花了些时间debug完才AC,对于这种逻辑较多但不难的题,想要一次写对,还是不要偷懒。先不要着急写代码,把大致逻辑图画出来,这样

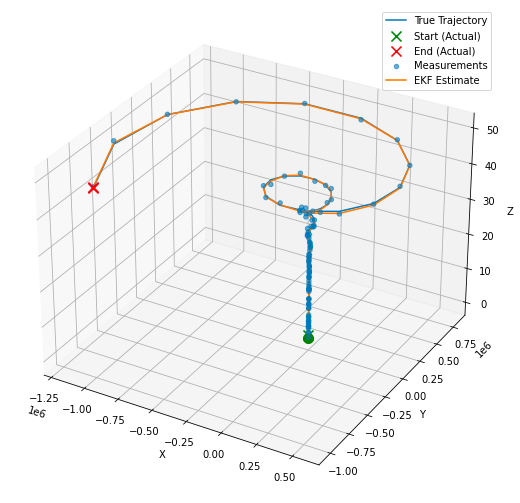
卡尔曼滤波(KF)和增广卡尔曼滤波(EKF)实现
卡尔曼滤波(KF) python实现: import numpy as npF = np.array([[1, 1], [0, 1]]) # 状态转移矩阵 X(k+1)=[[1, Δt], [0, 1]]*X(k) Δt=1Q = 0.1 * np.eye(2, 2) # 过程噪声协方差矩阵R = 0.1 * np.eye(2, 2) # 观测噪声协方
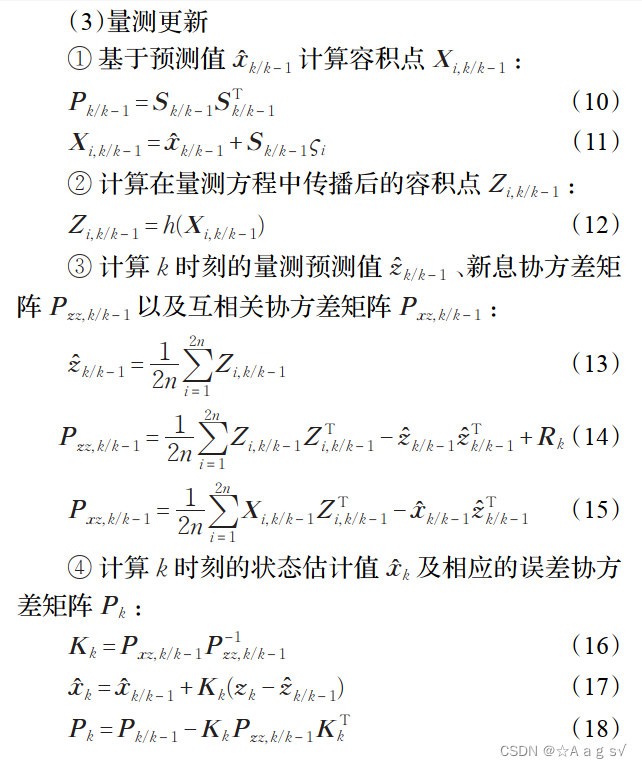
构建和应用卡尔曼滤波器 (KF)--扩展卡尔曼滤波器 (EKF)
作为一名数据科学家,我们偶尔会遇到需要对趋势进行建模以预测未来值的情况。虽然人们倾向于关注基于统计或机器学习的算法,但我在这里提出一个不同的选择:卡尔曼滤波器(KF)。 1960 年代初期,Rudolf E. Kalman 彻底改变了使用 KF 建模复杂系统的方式。从引导飞机或航天器到达目的地,到让您的智能手机找到它在这个世界上的位置,该算法融合了数据和数学,以令人难以置信的准确性提供对未来状态
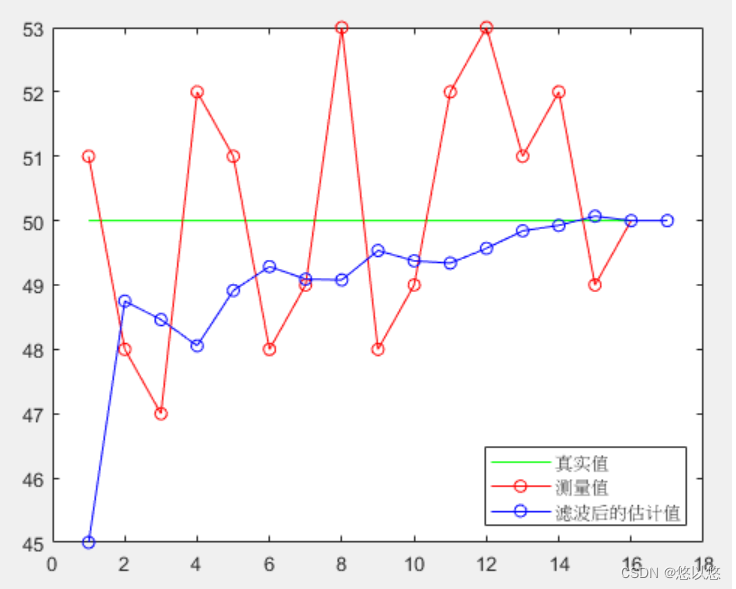
卡尔曼滤波(Kalman Filter,KF)基础推导及其实例
文章目录 卡尔曼滤波(Kalman Filter,KF)涉及到的主要知识卡尔曼滤波中涉及的几个常用概念卡尔曼滤波中最重要的五个公式卡尔曼增益的推导后验估计表达式的推导误差协方差矩阵的推导卡尔曼滤波在控制领域应用的推导 卡尔曼增益详解卡尔曼增益的计算方式卡尔曼增益的解读 卡尔曼滤波的应用普通应用中的一般流程实例说明应用实例(matlab):预测实际硬币的直径 卡尔曼滤波(Kalma