indoor专题

Experimental Demonstration of Optical Camera Communications Based Indoor Visible Light Positioning
读后感: 今天读了《Experimental Demonstration of Optical Camera Communications Based Indoor Visible Light Positioning System》——基于室内可见光的新型光学摄像头定位实验验证,有感如下: 本文提出图像定位方法根据真实的世界和图像中led的坐标确定Rx的位置,在确定接收端的位置之前要知道LED的坐

Indoor Depth Completion with Boundary Consistency and Self-Attention
Indoor Depth Completion with Boundary Consistency and Self-Attention 这篇文章主要提出了边界一致性网络(Boundary Consistency)和整合了(Self-Attention)这两个方法 摘要 背景 深度估计有助于3D识别,目前的商品级别的深度相机可以捕获深度和彩色图片 存在问题并提出课题 传感器存在无法识别到光

【EMSANet2022】Efficient Multi-Task RGB-D Scene Analysis for Indoor Environments
Efficient Multi-Task RGB-D Scene Analysis for Indoor Environments 室内环境的高效多任务RGB-D场景分析 arXiv:2207.04526v1 [cs.CV] 10 Jul 2022 文章地址:https://arxiv.org/abs/2207.04526 代码地址: https://github.com/TUI-NICR

【RDFNet2017】RDFNet: RGB-D Multi-level Residual Feature Fusion for Indoor Semantic Segmentation
RDFNet: RGB-D Multi-level Residual Feature Fusion for Indoor Semantic Segmentation RDFNet:用于室内语义分割的RGB-D多级残差特征融合 论文地址:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8237795&tag=1 代码:http
FRNet:Feature Reconstruction Network for RGB-D Indoor Scene Parsing实验补充
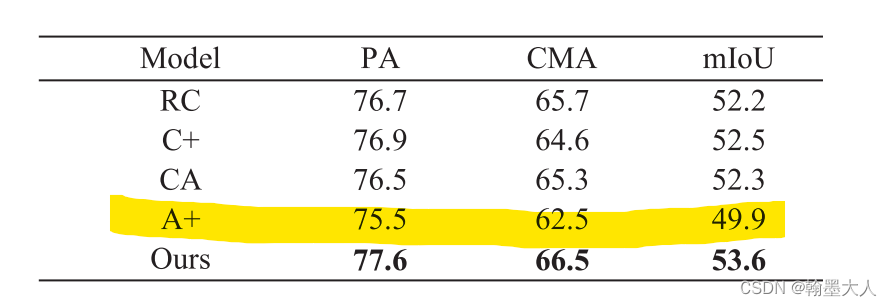
FRNet做了大量的消融实验,这里仔细来分析一下。 1:ResNet backbone: 作者消融实验使用了ResNet34作为backbone来提取特征,将最后一层的输出简单相加起来,然后通过不断的上采样获得最终的输出。并且只在最后一层进行监督。最终在NYU取得了45.9%的成绩。我自己也跑过,说实话有些偏高。 可视化: 作者提到FRNet为什么可以获得比较好的结果其原因是因为考虑到了跨模
RedNet: Residual Encoder-Decoder Network for indoor RGB-D Semantic Segmentation.
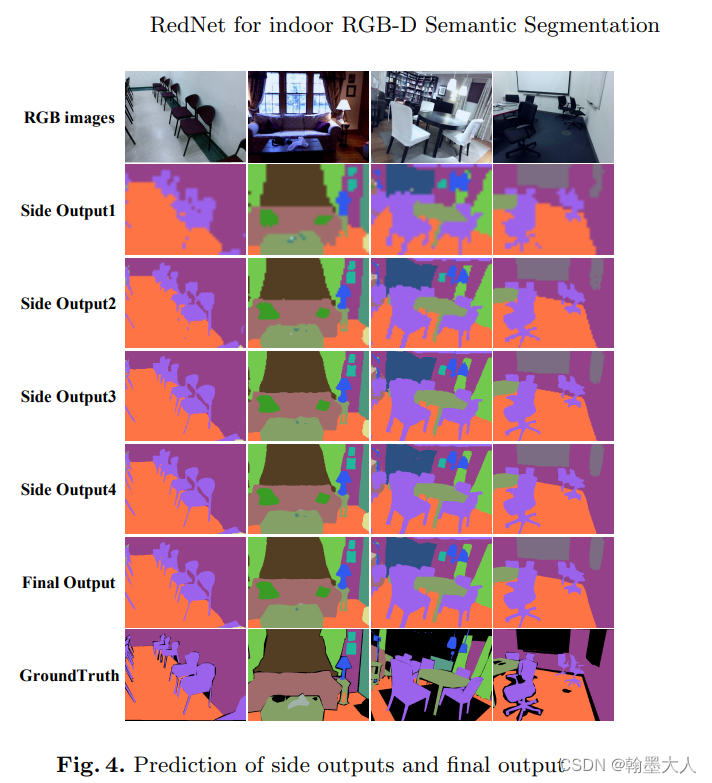
文章地址 这是一篇2018年的文章,之所以看它一是因为他的整体架构可以作为RGB-D的基础框架,比较通用,另一方面是因为在上一篇文章中提到的,恢复边界比较好。 放在2018的背景下,resnet已经提出,RedNet在encoder和decoder使用了残差块作为building block。作者同时提出了多尺度深监督,在现在的许多文章都用到了。最终在SUN RGB-D上取得47.8%的成绩。 F
3D Semantic Parsing of Large-Scale Indoor Spaces
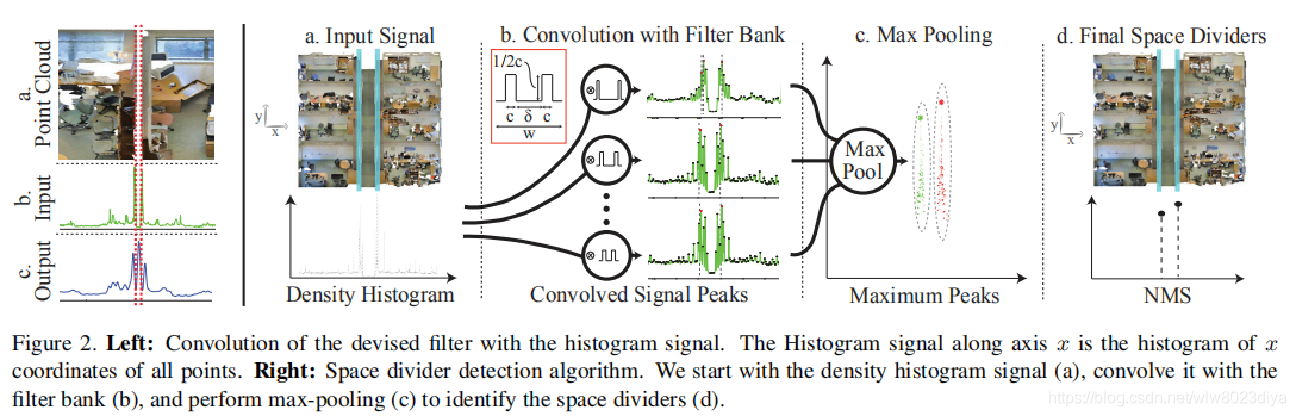
在本文中,作者提出了一种使用分层方法对整个建筑物的三维点云进行语义解析的方法:首先,将原始数据解析为语义有意义的空间(E 。g。 房间等)对齐成一个典型的参考坐标系。 第二,空间被解析成它们的结构和建筑元素(例如。 墙壁、柱子等)。 执行这些wi 全球三维空间的一个强有力的概念是我们方法的支柱。 第一步中的对齐将强3D先验从正则坐标系注入到第二步以进行发现 要素。 这允许不同的具有挑战性的场景,因

【论文阅读-室内场景合成:交互度量】Human-centric metrics for indoor scene assessment and synthesis
【关键词】3D modeling、Environment assessment、Indoor scene synthesis 【主要问题】对于已知类型的房间(已知摆放物品、已知房间形状、门窗位置)布局 【主要思想】定义以人为中心的度量来定量评估布局的质量(Human-Centric Metrics) 【主要方法】 定量评估方法 Human-object factors:使用human a
Magicol: Indoor Localization Using Pervasive Magnetic Field and Opportunistic WiFi Sensing
粗略翻译,方便快速阅读 abstract Anomalies of the omnipresent earth magnetic (i.e., geomagnetic) field in an indoor environment, caused by local disturbances due to construction materials, give rise to noisy di
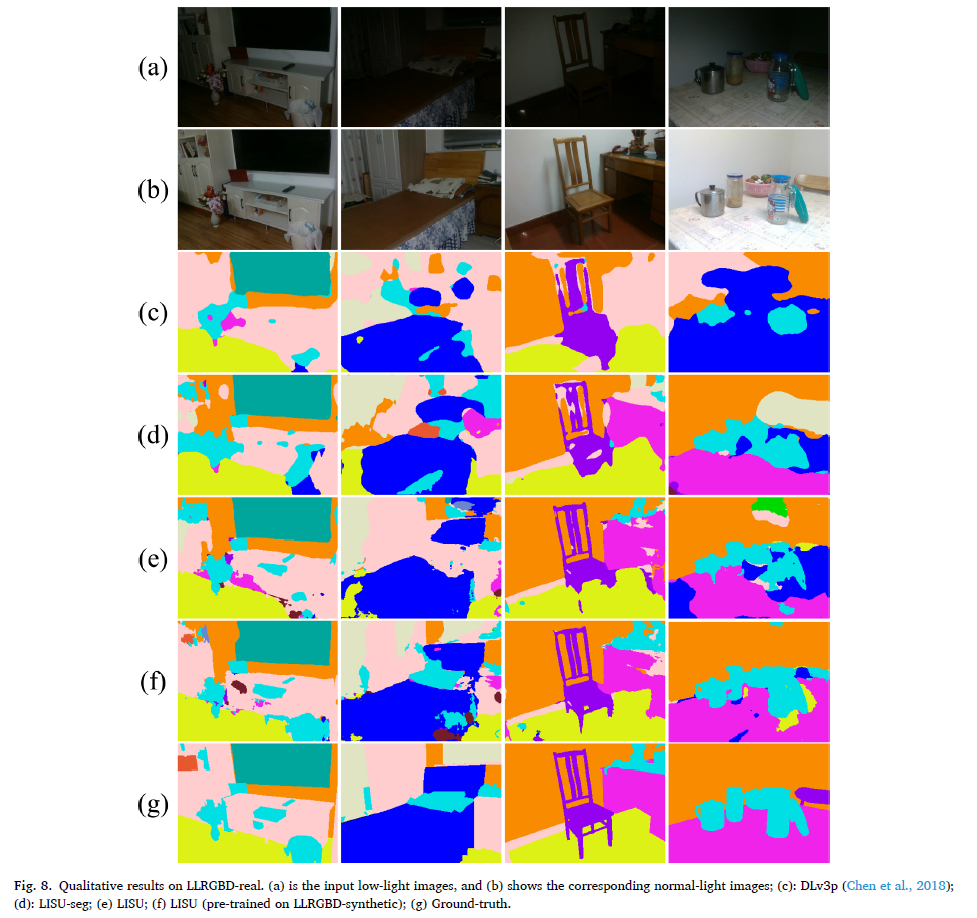
室内低光语义分割框架 LISU: Low-light indoor scene understanding 论文阅读
论文标题:LISU: Low-light indoor scene understanding with joint learning of reflectance restoration 代码:GitHub - noahzn/LISU: Low-light Indoor Scene Understanding 期刊:ISPRS Journal of Photogrammetry and Re

2014ICRA 宾大沈邵杰 《Multi-Sensor Fusion for Robust Autonomous Flight in Indoor andOutdoor Environments》
论文名: Multi-Sensor Fusion for Robust Autonomous Flight in Indoor and Outdoor Environments with a Rotorcraft MAV Abstract 我们提出了一种模块化和可扩展的方法来集成来自多个异构传感器的噪声测量,这些传感器在不同和不同的时间间隔内产生绝对或