imitation专题

One-Shot Imitation Learning
发表时间:NIPS2017 论文链接:https://readpaper.com/pdf-annotate/note?pdfId=4557560538297540609¬eId=2424799047081637376 作者单位:Berkeley AI Research Lab, Work done while at OpenAI Yan Duan†§ , Marcin Andrychow

One-Shot Imitation Learning with Invariance Matching for Robotic Manipulation
发表时间:5 Jun 2024 论文链接:https://readpaper.com/pdf-annotate/note?pdfId=2408639872513958656¬eId=2408640378699078912 作者单位:Rutgers University Motivation:学习一个通用的policy,可以执行一组不同的操作任务,是机器人技术中一个有前途的新方向。然而,

One-Shot Visual Imitation Learning via Meta-Learning
发表时间:CoRL 2017 论文链接:https://readpaper.com/pdf-annotate/note?pdfId=4667206488817680385¬eId=2408726470680795136 作者单位:University of California, Berkeley Motivation:为了使机器人成为可以执行广泛工作的通才,它必须能够在复杂的非结构化

Behavior Retrieval: Few-Shot Imitation Learning by Querying Unlabeled Datasets
发表时间:13 May 2023 论文链接:https://readpaper.com/pdf-annotate/note?pdfId=1900983943467731200¬eId=2446646993511259136 作者单位:Stanford University Motivation:使机器人能够以数据有效的方式学习新的视觉运动技能仍然是一个未解决的问题,有无数的挑战。解决这
Imitation Learning学习记录(理论例程)
前言 最近还是衔接着之前的学习记录,这次打算开始学习模仿学习的相关原理,参考的开源资料为 TeaPearce/Counter-Strike_Behavioural_Cloning: IEEE CoG & NeurIPS workshop paper ‘Counter-Strike Deathmatch with Large-Scale Behavioural Cloning’ (github

论文复现4,Awe:Waypoint-Based Imitation Learning for Robotic Manipulation
复现aloha增加航点预处理,代码根据官方代码链接:https://github.com/lucys0/awe 因为是在远程和local都安装过一次,遇到问题有点频繁,所以安装过程和问题一起写的,应该是挺全了。 git clone https://github.com/lucys0/awe.gitcd aweconda create -n awe python=3.9conda activate
waymo自动驾驶技术ChauffeurNet,Learning to Drive: Beyond Pure Imitation论文
由Mayank Bansal和Abhijit Ogale - Waymo Research 在Waymo,我们专注于建立世界上最有经验的驾驶员。就像任何优秀的驾驶员一样,我们的车辆需要通过识别周围物体并预测下一步可能做什么来感知和理解周围的世界,然后在遵守交通规则的同时决定如何安全驾驶。 近年来,使用大量标记数据的深度神经网络的监督训练迅速改进了许多领域的最新技术,特别是在物体感知和预测领域
【EAI 013】BC-Z: Zero-Shot Task Generalization with Robotic Imitation Learning
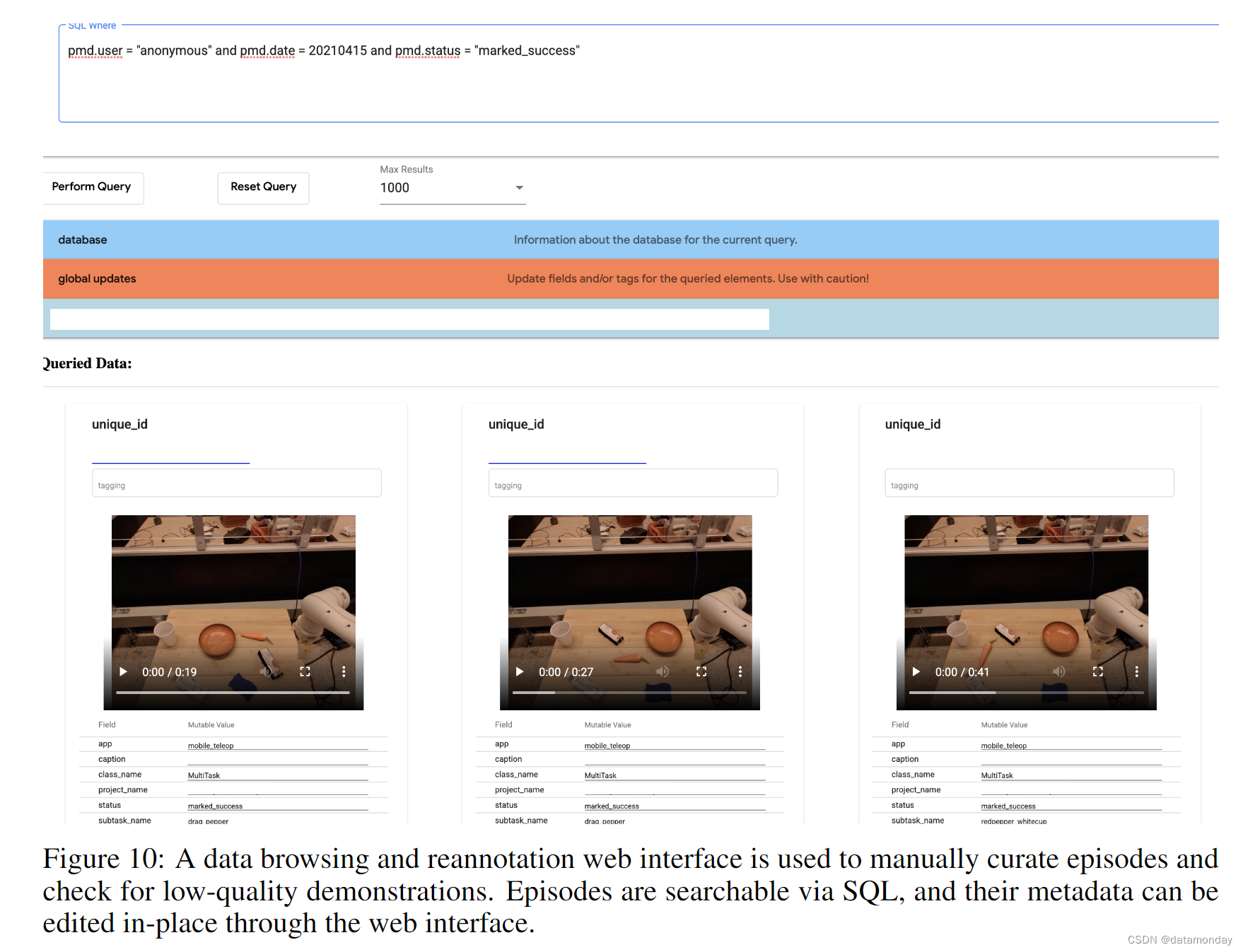
论文标题:BC-Z: Zero-Shot Task Generalization with Robotic Imitation Learning 论文作者:Eric Jang, Alex Irpan, Mohi Khansari, Daniel Kappler, Frederik Ebert, Corey Lynch, Sergey Levine, Chelsea Finn 论文原文:https

Imitation Learning(模仿学习)
Imitation Learning(模仿学习)是一种机器学习方法,它通过观察一个专家(人或另一个机器学习模型)的行为来学习完成任务的最佳策略。这种方法的核心思想是让机器学习模型从已有的数据中学习,而不是通过试错的方式。模仿学习常应用于强化学习领域,以加速模型的学习过程。 模仿学习的原理可以分为以下几个步骤: 1. 收集数据:首先,需要收集专家在执行任务时的行为数据,例如轨迹、动作等。这些数

【论文笔记】Towards Corrective Deep Imitation Learning in Data Intensive Environments
【论文笔记】Towards Corrective Deep Imitation Learning in Data Intensive Environments: Helping robots to learn faster by leveraging human knowledge Abstract Interactive imitation learning refers to learni