homography专题

Homography单应矩阵
在计算机视觉中,平面的单应性被定义为一个平面到另外一个平面的投影映射。因此一个二维平面上的点映射到摄像机成像仪上的映射就是平面单应性的例子。如果点Q到成像仪上的点q的映射使用齐次坐标,这种映射可以用矩阵相乘的方式表示。若有一下定义: 则可以将单应性简单的表示为: 这里引入参数s,它是任意尺度的比例(目的是使得单应性定义到该尺度比例)。通常根据习惯放在H的外面。
opencv-Features2D+Homography to find a known object
官方地址#include <stdio.h>#include <iostream>#include "opencv2/core.hpp"#include "opencv2/imgproc.hpp"#include "opencv2/features2d.hpp"#include "opencv2/highgui.hpp"#include "opencv2/calib3d.hpp"
homography单应性
概要: 来源:http://www.learnopencv.com/homography-examples-using-opencv-python-c/ 单应性变换就是一个平面到另一个平面的映射关系。 如图,两张图片中相同颜色的点叫做corresponding Points,比如两个红点就是一对corresponding points。单应性矩阵(Homography)就是

图像拼接——基于homography的特征匹配算法
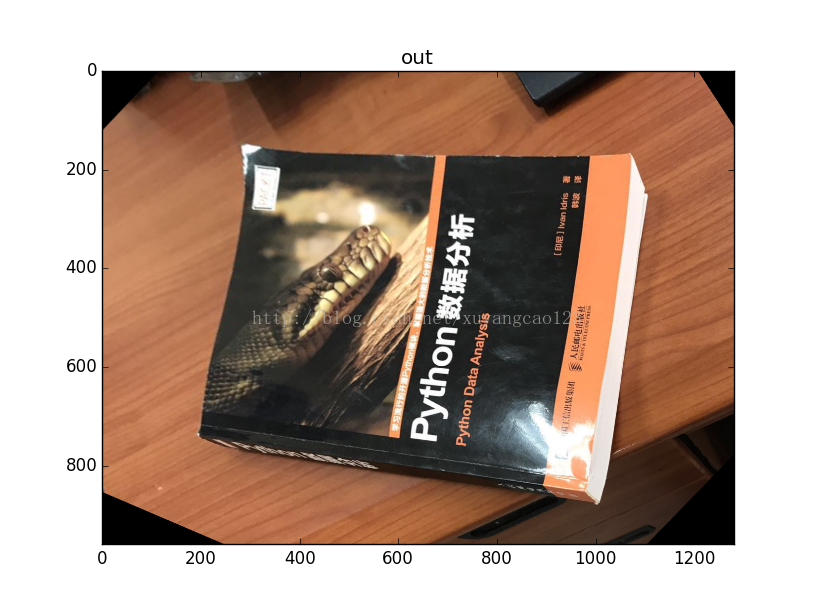
目录 1. 任务要求2. 数据集3. 基于homography的特征匹配算法4. 拼接流程展示4.1 图片实例4.2 特征点位图4.3 特征点匹配结果4.4 相机校准结果4.5 拼接结果 5. 部分图像拼接结果展示 1. 任务要求 输入:同一个场景的两张待拼接图像(有部分场景重合)。任务:从输入的两张图像中提取特征点和描述子,可以使用现有的图像处理库来执行此任务。自己实现

【图像拼接/深度单应估计】论文精读:Content-Aware Unsupervised Deep Homography Estimation
第一次来请先看这篇文章:【图像拼接(Image Stitching)】关于【图像拼接论文精读】专栏的相关说明,包含专栏使用说明、创新思路分享等(不定期更新) 图像拼接系列相关论文精读 Seam Carving for Content-Aware Image ResizingAs-Rigid-As-Possible Shape ManipulationAdaptive As-Natural-As
从Homography矩阵得到旋转和平移量(From Homography to Rotation and Translation)
最近在做机器人导航项目,于是就顺手在OpenCV里面将以前看过但是不太理解的从Homography求Rotation和Translation实现了一下 代码如下: int calcRTfromHomo(CvMat* H, double t[3], double rodrot[3]){double r[9];CvMat _r = cvMat(3, 3, CV_64F, r); //