本文主要是介绍opencv-Features2D+Homography to find a known object,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
官方地址
#include <stdio.h>
#include <iostream>
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/features2d.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/calib3d.hpp"
#include "opencv2/xfeatures2d.hpp"
using namespacecv;
using namespacecv::xfeatures2d;
voidreadme();
/* @function main */
intmain(intargc,char** argv )
{
if( argc != 3 )
{ readme();return-1; }
Matimg_object =imread( argv[1],IMREAD_GRAYSCALE);
Matimg_scene =imread( argv[2],IMREAD_GRAYSCALE);
if( !img_object.data|| !img_scene.data)
{ std::cout<<" --(!) Error reading images "<< std::endl;return-1; }
//-- Step 1: Detect the keypoints and extract descriptors using SURF
intminHessian = 400;
Ptr<SURF>detector =SURF::create( minHessian );
std::vector<KeyPoint> keypoints_object, keypoints_scene;
Matdescriptors_object, descriptors_scene;
detector->detectAndCompute( img_object,Mat(), keypoints_object, descriptors_object );
detector->detectAndCompute( img_scene,Mat(), keypoints_scene, descriptors_scene );
//-- Step 2: Matching descriptor vectors using FLANN matcher
FlannBasedMatchermatcher;
std::vector< DMatch > matches;
matcher.match( descriptors_object, descriptors_scene, matches );
doublemax_dist = 0;doublemin_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for(inti = 0; i < descriptors_object.rows; i++ )
{doubledist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 3*min_dist )
std::vector< DMatch > good_matches;
for(inti = 0; i < descriptors_object.rows; i++ )
{if( matches[i].distance <= 3*min_dist )
{ good_matches.push_back( matches[i]); }
}
Matimg_matches;
drawMatches( img_object, keypoints_object, img_scene, keypoints_scene,
good_matches, img_matches,Scalar::all(-1),Scalar::all(-1),
std::vector<char>(),DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//-- Localize the object
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for(size_ti = 0; i < good_matches.size(); i++ )
{
//-- Get the keypoints from the good matches
obj.push_back( keypoints_object[ good_matches[i].queryIdx ].pt );
scene.push_back( keypoints_scene[ good_matches[i].trainIdx ].pt );
}
MatH =findHomography( obj, scene,RANSAC);
//-- Get the corners from the image_1 ( the object to be "detected" )
std::vector<Point2f> obj_corners(4);
obj_corners[0] =cvPoint(0,0); obj_corners[1] =cvPoint( img_object.cols, 0 );
obj_corners[2] =cvPoint( img_object.cols, img_object.rows); obj_corners[3] =cvPoint( 0, img_object.rows);
std::vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, H);
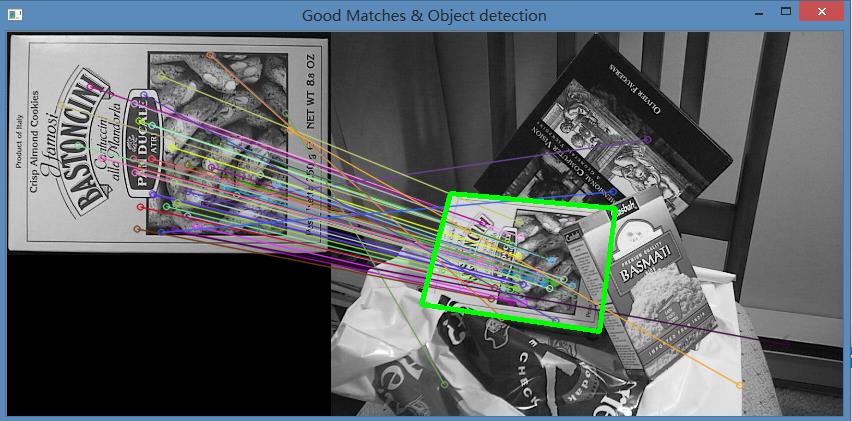
//-- Draw lines between the corners (the mapped object in the scene - image_2 )
line( img_matches, scene_corners[0] +Point2f( img_object.cols, 0), scene_corners[1] +Point2f( img_object.cols, 0),Scalar(0, 255, 0), 4 );
line( img_matches, scene_corners[1] +Point2f( img_object.cols, 0), scene_corners[2] +Point2f( img_object.cols, 0),Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[2] +Point2f( img_object.cols, 0), scene_corners[3] +Point2f( img_object.cols, 0),Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[3] +Point2f( img_object.cols, 0), scene_corners[0] +Point2f( img_object.cols, 0),Scalar( 0, 255, 0), 4 );
//-- Show detected matches
imshow("Good Matches & Object detection", img_matches );
waitKey(0);
return0;
}
/* @function readme */
voidreadme()
{ std::cout <<" Usage: ./SURF_descriptor <img1> <img2>"<< std::endl; }
官方地址#include <stdio.h>
#include <iostream>
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/features2d.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/calib3d.hpp"
#include "opencv2/xfeatures2d.hpp"
using namespacecv;
using namespacecv::xfeatures2d;
voidreadme();
/* @function main */
intmain(intargc,char** argv )
{
if( argc != 3 )
{ readme();return-1; }
Matimg_object =imread( argv[1],IMREAD_GRAYSCALE);
Matimg_scene =imread( argv[2],IMREAD_GRAYSCALE);
if( !img_object.data|| !img_scene.data)
{ std::cout<<" --(!) Error reading images "<< std::endl;return-1; }
//-- Step 1: Detect the keypoints and extract descriptors using SURF
intminHessian = 400;
Ptr<SURF>detector =SURF::create( minHessian );
std::vector<KeyPoint> keypoints_object, keypoints_scene;
Matdescriptors_object, descriptors_scene;
detector->detectAndCompute( img_object,Mat(), keypoints_object, descriptors_object );
detector->detectAndCompute( img_scene,Mat(), keypoints_scene, descriptors_scene );
//-- Step 2: Matching descriptor vectors using FLANN matcher
FlannBasedMatchermatcher;
std::vector< DMatch > matches;
matcher.match( descriptors_object, descriptors_scene, matches );
doublemax_dist = 0;doublemin_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for(inti = 0; i < descriptors_object.rows; i++ )
{doubledist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 3*min_dist )
std::vector< DMatch > good_matches;
for(inti = 0; i < descriptors_object.rows; i++ )
{if( matches[i].distance <= 3*min_dist )
{ good_matches.push_back( matches[i]); }
}
Matimg_matches;
drawMatches( img_object, keypoints_object, img_scene, keypoints_scene,
good_matches, img_matches,Scalar::all(-1),Scalar::all(-1),
std::vector<char>(),DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//-- Localize the object
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for(size_ti = 0; i < good_matches.size(); i++ )
{
//-- Get the keypoints from the good matches
obj.push_back( keypoints_object[ good_matches[i].queryIdx ].pt );
scene.push_back( keypoints_scene[ good_matches[i].trainIdx ].pt );
}
MatH =findHomography( obj, scene,RANSAC);
//-- Get the corners from the image_1 ( the object to be "detected" )
std::vector<Point2f> obj_corners(4);
obj_corners[0] =cvPoint(0,0); obj_corners[1] =cvPoint( img_object.cols, 0 );
obj_corners[2] =cvPoint( img_object.cols, img_object.rows); obj_corners[3] =cvPoint( 0, img_object.rows);
std::vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, H);
//-- Draw lines between the corners (the mapped object in the scene - image_2 )
line( img_matches, scene_corners[0] +Point2f( img_object.cols, 0), scene_corners[1] +Point2f( img_object.cols, 0),Scalar(0, 255, 0), 4 );
line( img_matches, scene_corners[1] +Point2f( img_object.cols, 0), scene_corners[2] +Point2f( img_object.cols, 0),Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[2] +Point2f( img_object.cols, 0), scene_corners[3] +Point2f( img_object.cols, 0),Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[3] +Point2f( img_object.cols, 0), scene_corners[0] +Point2f( img_object.cols, 0),Scalar( 0, 255, 0), 4 );
//-- Show detected matches
imshow("Good Matches & Object detection", img_matches );
waitKey(0);
return0;
}
/* @function readme */
voidreadme()
{ std::cout <<" Usage: ./SURF_descriptor <img1> <img2>"<< std::endl; }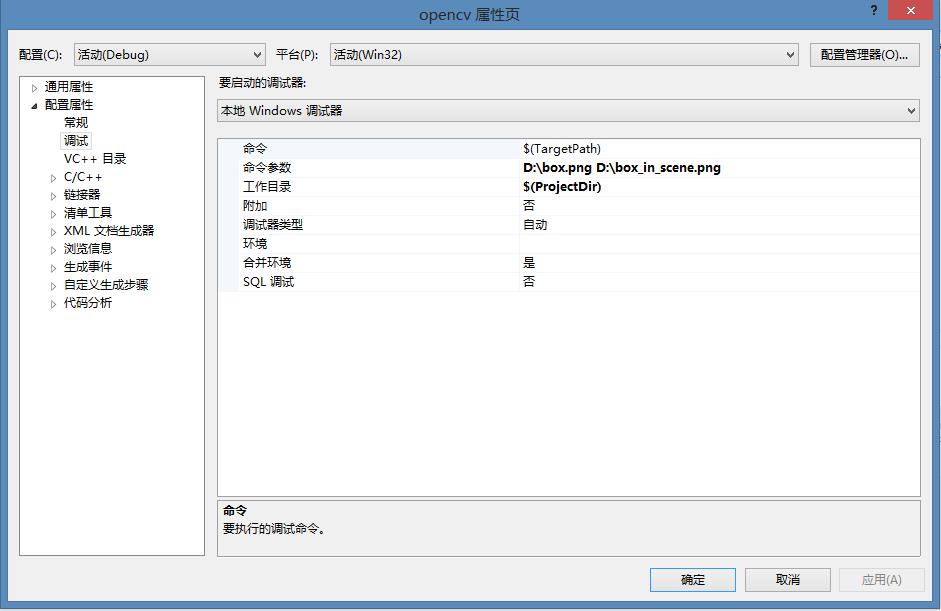
这篇关于opencv-Features2D+Homography to find a known object的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





