fitting专题
Fitting Parameterized Three-Dimensional Models to Images
摘要 基于模型的识别和运动跟踪依赖于解决投影和模型参数,使其最佳适应匹配的2D图像特征的3D模型的能力。本文将当前的参数求解方法扩展到处理具有任意曲面和任意数量的内部参数(表示关节、可变尺寸或表面变形)的对象。开发了数值稳定化方法,考虑了图像测量中固有的不准确性,并允许在匹配数小于未知参数数时确定有用的解决方案。使用Levenberg-Marquardt方法始终确保解决方案的收敛性。这些技术

【北邮鲁鹏老师计算机视觉课程笔记】04 fitting 拟合
【北邮鲁鹏老师计算机视觉课程笔记】04 fitting 拟合 1 拟合的任务 如何从边缘找出真正的线? 存在问题 ①噪声 ②外点、离群点 ③缺失数据 2 最小二乘 存在的问题 3 全最小二乘 度量的是点到直线的距离而不是点在y方向到直线的距离 提示:点到直线的距离公式 归一化后保留分子 4 极大似然估计 5 鲁棒的最小二乘 不直接用点到直线的距离

1.1介绍与多项式曲线拟合(Polynomial Curve Fitting)
今天开始学Pattern Recognition and Machine Learning (PRML),章节1.1,介绍与多项式曲线拟合(Polynomial Curve Fitting) 转载请注明源地址:http://www.cnblogs.com/xbinworld/archive/2013/04/21/3034300.html Pattern Recognition

MATLAB curve fitting toolbox没有怎么办?
版本:MATLAB R2023b 如果在安装MATLAB时仅仅选择了安装MATLAB,而并未选择其他选项,则在进入MATLAB后会发现顶部的APP栏中无法找到曲线拟合工具箱。 本人跟随MATLAB中的教程进行下载时,出现了如下报错: 最终解决方案:找到MATLAB的安装包,在不卸载原有MATLAB软件的基础上,重新进行安装即可。在安装时记得勾选曲线拟合工具箱。 在产品这一步中,除
数学建模暑期集训12:神经网络预测——Neural Net Fitting工具箱的使用
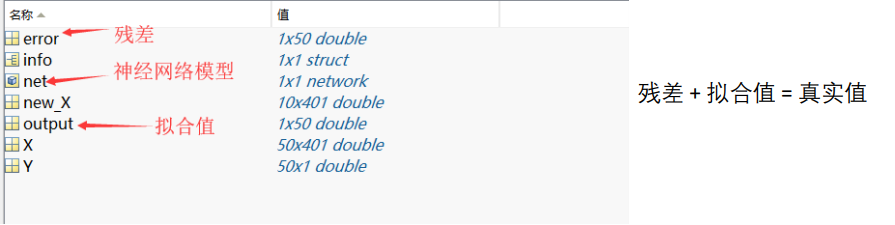
在本专栏的第十三篇博文数学建模学习笔记(十三)神经网络——中:matlab程序实现记录过如何在matlab用代码进行神经网络的训练。 本篇内容将记录如何使用Neural Net Fitting工具箱,做神经网络预测时更为简便。 1.数据选取 例题: 原始数据: 导入数据到matlab: 新建变量,点击,复制相应数据。 2.工具箱的使用 这里有三种算法可供选择: 莱文贝格-马夸

车道线检测End-to-end Lane Detection through Differentiable Least-Squares Fitting(论文解读)
论文链接 https://arxiv.org/pdf/1902.00293 动机 一般的车道线检测算法分为两步,第一步进行图像分割,第二步对分割结果进行后处理。这种2-step的方法不是直接预测车道线,所以通过分割的方式预测车道线不一定能够实现最佳的表现。 贡献 提出一个可以直接预测车道线的方法。利用最小二乘法可微的性质,实现车道线检测网络端到端的训练。车道线检测网络分为两个部分:(1)

机器学习:神经网络的 over fitting
我们在训练模型的时候,经常会遇到 under fitting 与 over fitting 的概念,现在的机器学习,基本是数据驱动型的。模型最终是要拟合数据的分布,一般如果模型的 capacity 不够,就容易造成 under fitting,这个通过增加模型的 capacity 都能得到解决,现在训练模型,最担心的往往是另外一种问题,就是所说的 over fitting。 模型如果在训练集上表
论文阅读——椭圆检测算法 2015 A fast and robust ellipse detector based on top-down least-square fitting
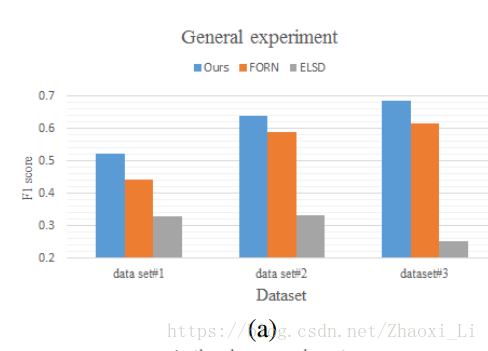
今天阅读了一个2015年的一篇论文,关于椭圆检测的,向作者发送邮件索取代码和原始数据也没回我- -||。所以只阅读文章思想并从算法上分析其性能。下面开始对文章进行分析。 〇 摘要部分 现存的算法通常使用一个自下而上的策略(bottom-up strategy)将边缘点或者椭圆弧段组合为椭圆,因此限制了其鲁棒性。作者提出了一个快速准确的椭圆检测算法,算法的主要思想是利用一种新的自上而下的
PCL对点云进行曲面拟合Surface Fitting(Curve Fitting升维版)
1. 使用PCL进行曲面surface拟合 绿色点为原始输入点云,红色曲线和灰色曲面均为拟合结果。 1.1 使用B-spline样条曲面拟合曲面,如果发现显示窗口未响应,则应该给代码中的viewer.spinOnce()添加参数,如viewer.spinOnce(3000) 1.2 输入点云格式应该是PointXYZ,不能有RGB分量。如果想要改变点云格式,应该将typedef pcl::