euroc专题
【SVO2.0】源码编译运行和使用公开数据集EuRoc
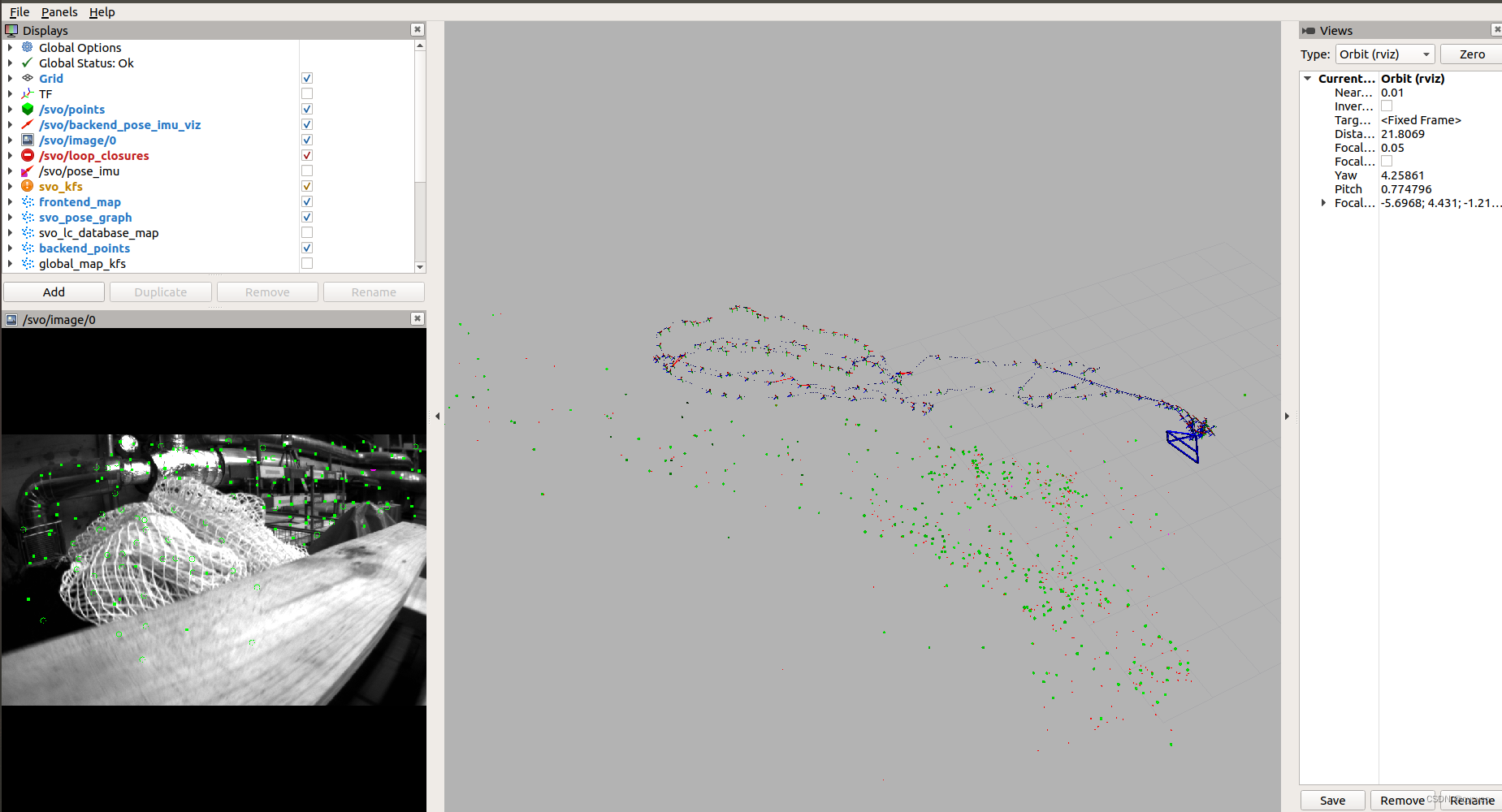
前置安装 需要先安装ros,melodic或者neotic,搜索一下教程 安装和编译SVO2.0 按官方公开的github的教程步骤来就行https://github.com/uzh-rpg/rpg_svo_pro_open/tree/master,期间遇到连不上github的问题,搜索设置一下密钥就可以了。两种方法都要编译,不然用不了地图 运行视觉前端visual front-end

VINS-fusion 跑通Euroc、TUM、KITTI数据集,以及评估工具EVO的下载和使用
零、EVO工具获取与使用 ubuntu20.04中python版本是3.x,因此对应的pip工具会变成pip3,可以先参考如下链接查看自己系统的python和pip版本。 Ubuntu20.04安装evo(详细教程)【亲测有效】_ubantu20.04 evo_学无止境的小龟的博客-CSDN博客 再调用如下命令对evo工具进行安装 pip3 install evo --upgrade --

T265录制的rosbag拆包:拆IMU序列和图像序列方法以及如何制作双目euroc、双目tum数据集
目录 1.录制bag包 2.左右目图像的拆解 3.拆IMU数据 4.如何制作eruoc与tum数据集 4.1 eruoc数据集格式 4.2 对齐时间戳 4.3 编写imu.csv文件 4.4 生成索引文件 4.一个脚本完成拆包 1.录制bag包 这里推荐我的同学的博客,大家可以参考这篇博客录制T265的ros包并解决一些问题: 使用 RealSe
msckf-vio 跑Euroc数据集,并用evo进行评估
所需材料: Euroc数据集主页:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasetsevo评估工具代码:https://github.com/MichaelGrupp/evo向msckf-vio中添加保存位姿的代码,可参考https://blog.csdn.net/xiaoxiaoyikesu/

从 EuRoC MAV Dataset 的 .zip 文件生成 .bag 的 python 脚本
EuRoc MAV Dataset 是 VSLAM 和 VIO 常用的一个数据集。每个场景同时保存了 .bag 的 rosbag 文件和 .zip 的压缩文件,但是在国内的网络中下载 .bag 文件异常缓慢,而 .zip 更小,下载要稍快一些。而且 .zip 文件解压后的文件夹中包含了比 rosbag 更多的信息,既包括了双目的图像和 imu 信息,还有传感器安装方位和采用外部定位设备获取的姿态和

Result of orbslam2 orbslam3 on EuRoC dataset
笔者刚跑了一下orb2和orb3的评估函数,如图所示 整体上结果差不多,可以看到orb2有个小角,推测是由于orb2没有多地图的设计导致它必须一直跟着跑图,而orb3有多地图的设计,可以“自断手臂”然后新图继续跟上。 评估代码来自orb2和orb3原生代码的./evaluation/evaluate_ate_scale.py,写了一个小脚本实现一起运行 #!/bin/bashpat
EuROC 数据集格式及相关代码
Euroc提供ROS和zip两种数据格式 下载地址 rosbag格式 话题列表 zip格式 数据包列表 ├── body.yaml // 没啥用├── cam0 // 左目图像数据│ ├── data // *.png文件(文件命名即为时间戳)│ ├── data.csv // 两列,第一列为时间戳,第二列为对应图片名│