cylinder专题

通过 MATLAB 的 cylinder 函数生成圆柱体的表面坐标,生成表示一个具有非标准形状的圆柱体(在本例中是杯子)
MATLAB的机器人系统工具箱(RST)的官方例程Plan a Reaching Trajectory with Multiple Kinematic Constraints规划具有多个运动学约束的到达轨迹 % 创建用于视觉化杯子的点[X,Y,Z] = cylinder(cupRadius*linspace(0,1,50).^0.125);% 调整 Z 坐标的比例,使其符合杯子的高度Z
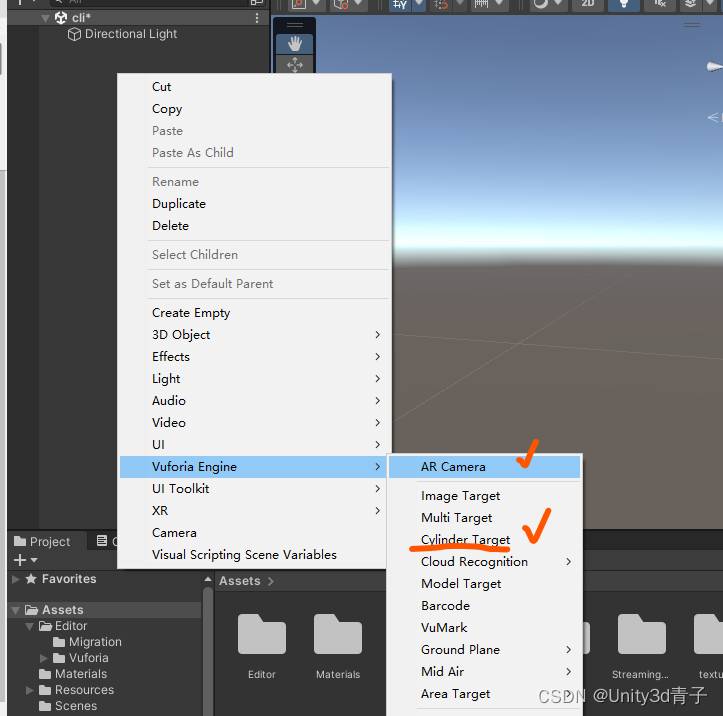
【Vuforia+Unity】AR03-圆柱体物体识别(Cylinder Targets)
1.创建数据库模型 这个是让我们把生活中类似圆柱体和圆锥体的物体进行AR识别所选择的模型 Bottom Diameter:底部直径 Top Diameter:顶部直径 Side Length:圆柱侧面长度 请注意,您不必上传所有三个部分的图片,但您需要先为侧面曲面关联一个图像,然后才能下载设备数据库并使用这个圆柱体目标。 剩下的步骤和前面一样,下载数据库,放到Unity中

用Balder根据两个三维点创建Cylinder
Balder中自动创建的Cylinder默认是处于垂直状态的,如果想要根据两个三维坐标创建一个圆柱,那么就需要对刚创建的Cylinder进行旋转操作。 private Cylinder CreatePipeCylinderFromGraphic(double x1,double y1,double z1,double x2,double y2,double z2,double Radius,

用Three.js根据两个三维点创建Cylinder
Three.js中默认不能直接根据两个三维点的坐标创建Cylinder,创建的Cylinder默认是垂直于XOY平面的,不便于实际应用,下面是用Three.js根据两个三维点创建Cylinder: function createCylinderMesh(x1,y1,z1,x2,y2,z2){ var x0 = (x1 + x2) / 2;var y0 = (y1 + y2) / 2;var
ZOJ3866 Cylinder Candy(数学)
题意: 圆柱给出半径r,高度h,先在往这个圆柱体上涂一层厚度为d的巧克力,求总体积和总表面积 要点: 纯数学积分题,就当复习数学了。 #include<stdio.h>#include<string.h>#include<stdlib.h>#include<math.h>#define PI acos(-1.0)int main(){double r, d, h;int

COMSOL:Three-Cylinder Reciprocating Engine补充
Comsol第二个解决方案中(sol2)中的时间不收敛: Solution 2 中的Time-dependent Solver中原来使用的是Segregated,现在应改为Fully Coupled再对相应的最大收敛数进行更改。