colmap专题

ubuntu20.04 colmap安装
apt-get update apt-get install colmap 官方包网址: colmap_3.6+really3.6-1_amd64.deb Debian 11 Download (pkgs.org) 官方安装非常简单,但是看网上都是手动安装教程,都麻烦的要命!我也踩了两天雷,还是看github上的issue找到的 注意: 这种安装方式会出现不能用cuda进行稠密重

ubuntu /windows 安装COLMAP
目录 一、COLMAP简介 二、ubuntu安装COLMAP 三、windows安装COLMAP 一、COLMAP简介 COLMAP 是一款用于3D重建和图像处理的软件,它结合了计算机视觉算法和优化技术,用于从一组图像中构建三维结构。COLMAP 是一个全功能的通用视觉测距和三维建模工具,旨在从常规图像中自动化创建三维模型。这个工具广泛应用于摄影测量、机器人技术、增强现实等领域。

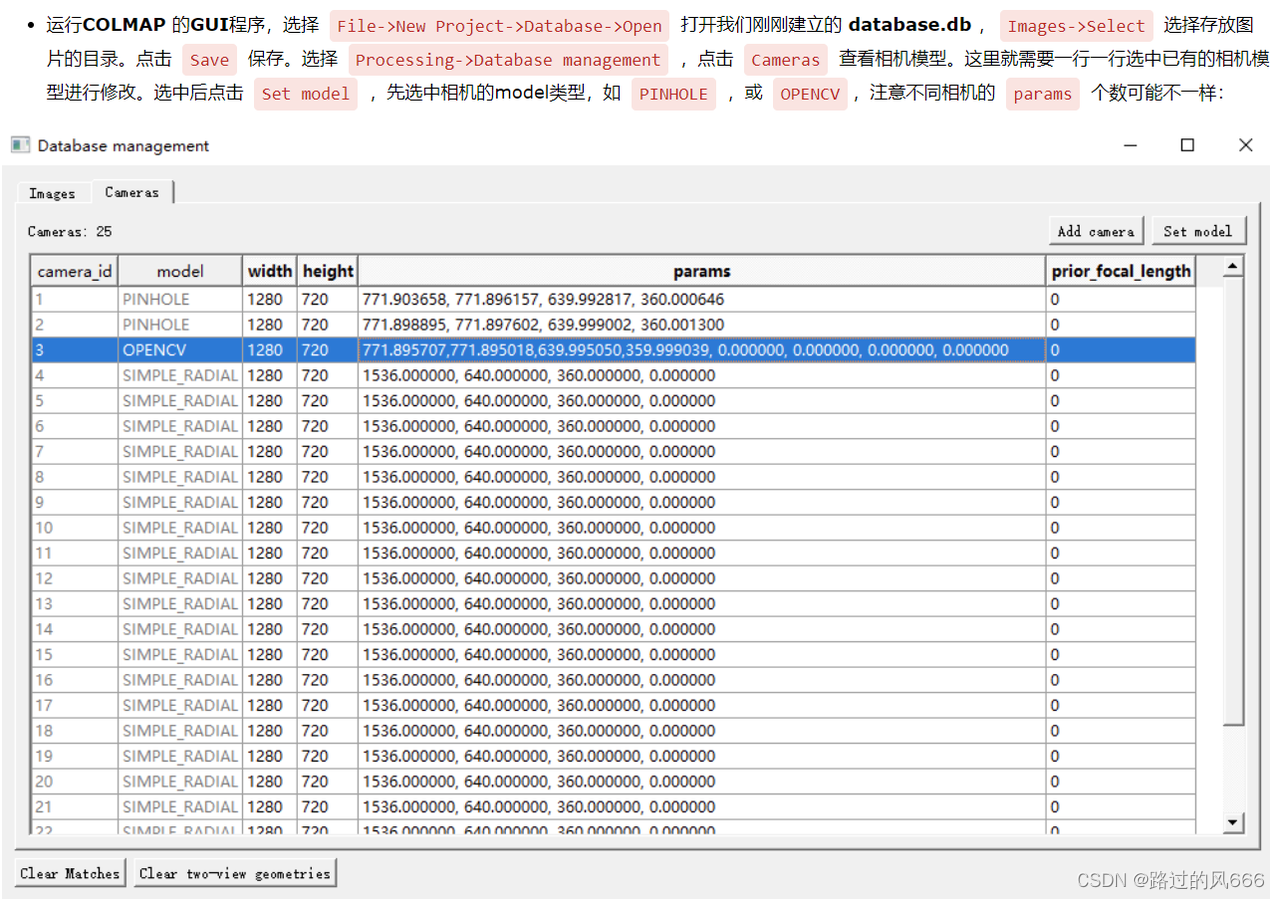
colmap的几种相机类型和内外参取得方法
colmap的相机类型可以参考models.h文件。 主要有以下几种相机类型: SimplePinhole: 内参格式:f, cx, cy 实际用的时候:fx=fy=f Pinhole: 内参格式:fx, fy, cx, cy 其他可以自行查看models.h文件。 内参存放在images.bin, 外参存放在cameras.bin中 def read_colmap(path):t
Blender生成COLMAP数据集
最近在做3DGS方向,整理了一下Blender生成自己的数据集。 1 Introduction 在Blender中构建场景(light, object, camera),利用Blender的python脚本对其渲染,导出多视角下渲染出的RGB图和depth map,并将transform.json转为COLMAP格式,以便直接用于SfM初始化高斯点云。 2 Python script

【三维重建工具】NeRFStudio、3D GaussianSplatting、Colmap安装与使用指南(更新中)
目录 一、NeRFStudio安装1.安装(ubuntu系统)2.安装(windows系统) 二、安装tinycudann三、Colmap安装与使用1. 安装依赖2. 安装colmap3.使用colmap3.1 可视化界面使用3.2 Nerfstudio命令行调用Colmap 四、使用NeRFStudio进行三维重建五、3D GaussianSplatting安装与使用(即将到来)五* CU
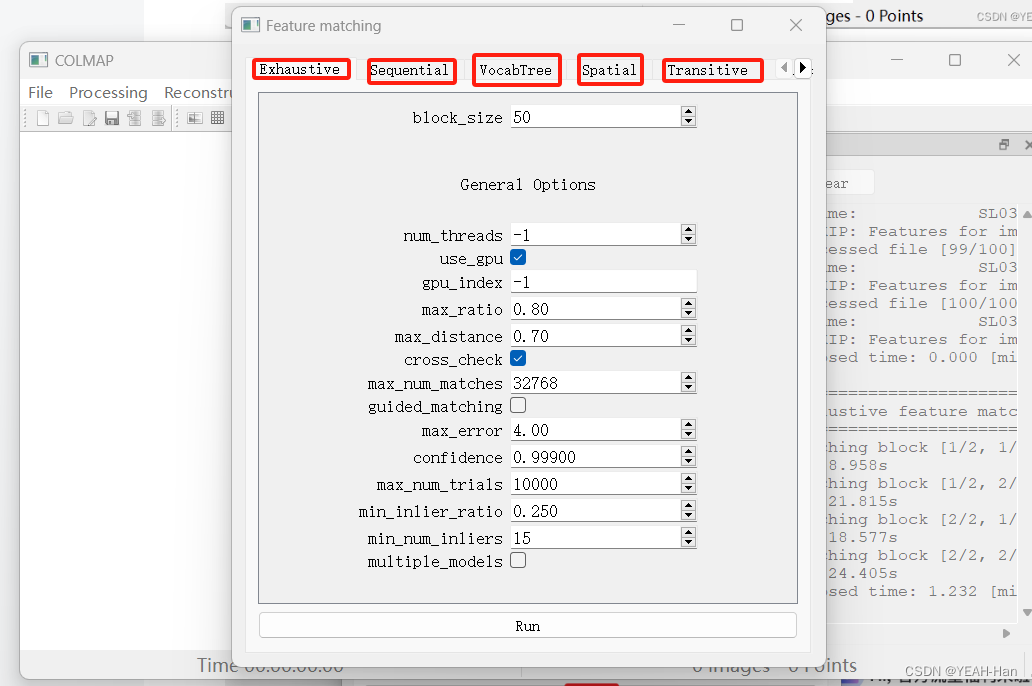
COLMAP 【Feature matching】特征匹配参数解释
(Windows)Colmap 具体使用教程可参考我的这篇博文 windows+colmap实现SFM三维重建位姿估计-CSDN博客 下面只是matching参数解释 Matching这个阶段很重要,匹配方式不同会对最终结果影响很大,要根据实际情况选择合适的匹配方式。下面是各个参数的详细解释。 1.Exhaustive——官方文档中说明Exhaustive耗时最长,因为所有图像都会两两
COLMAP(Windows)实现SFM三维重建位姿估计
问题产生: Guassian splatting第一步用colmap进行位姿估计,图片匹配失败,输出图片全靠运气,最少的时候甚至一张都没匹配上,所以想到用colmap软件先进行匹配,再放入高斯训练。 colmap使用步骤: 1.打开colmap.bat 2.新建项目 【File】–> 【New Project】 3. 新建database文件,选择images所在路径 【N
colmap使用教程
COLMAP 是具有图形和命令行界面的通用运动结构 (SfM) 和多视图立体 (MVS) 管道。 它为有序和无序图像集的重建提供了广泛的功能。 常见的基于nerf算法均需要colmap来计算位姿 安装colmap: conda install colmap 需要使用python3.9 step1:准备多视角图片 step2: 使用图形界面来生成数据集 colmap gui(新

计算机视觉 了解OpenCV、COLMAP、PyTorch3D 和 OpenGL 中坐标系3D转换的简要指南
一、简述 由于坐标系不同,在OpenCV、COLMAP、PyTorch3D和OpenGL等 3D 框架的世界中进行转换可能会令人觉得头疼。这里比较它们的坐标系并提供它们之间转换的示例。核心还是找到在这些不同的 3D 环境中无缝工作所需的知识,让我们以清晰直接的方式探索和理解这些坐标系。 2D 成像与 3D 建模之间的差距需要对坐标系的扎实掌握,坐标系为三维环境中

colmap 已知pose 重建 kitti数据尝试
Frequently Asked Questions — COLMAP 3.7 documentation COLMAP已知相机内外参数重建稀疏/稠密模型 - thronsbird - 博客园 Colmap根据相机内外参数重建稀疏模型_m0_47677188的博客-CSDN博客_colmap 命令行 准备 images.txt 现利用 colmap的script 提取database中
实验笔记之——基于COLMAP的Instant-NGP与3D Gaussian Splatting的对比
之前博客进行了COLMAP在服务器下的测试 实验笔记之——Linux实现COLMAP-CSDN博客文章浏览阅读794次,点赞24次,收藏6次。学习笔记之——NeRF SLAM(基于神经辐射场的SLAM)-CSDN博客NeRF 所做的任务是 Novel View Synthesis(新视角合成),即在若干已知视角下对场景进行一系列的观测(相机内外参、图像、Pose 等),合成任意新视角下的图像。传
实验笔记之——Linux实现COLMAP
之前博客跑instant-NGP的时候,除了用官方的数据集,用自己的数据则是通过手机采集,同时获得pose与image。但是这种获取的方式对于3D gaussian而言,并不支持对应的数据格式,为此采用COLMAP来根据image获取pose,进而给NeRF提供数据~ 实验笔记之——基于windows复现Instant-NGP-CSDN博客文章浏览阅读726次,点赞19次,收藏10次。之前博客对
COLMAP 三维重建 笔记
目录 安装COLMAP 需要设置环境变量 COLMAP数据下载 使用Colmap+OpenMVS进行物体的三维重建 安装COLMAP 1.1 下载Colmap:https://demuc.de/colmap/#download 选择cuda版本的进行下载。 1.2 下载OpenMVS,可以选择下载源码自行编译也可
Ubuntu下COLMAP的编译与安装全攻略
文章目录 一、前言二、安装依赖库基本的依赖安装Ceres Solver安装不需要cuda支持需要cuda支持 三、编译colmap四、运行colmap五、总结 一、前言 在计算机视觉领域,colmap是一款功能强大的开源图像重建工具。它提供了包括SfM(Structure from Motion)、MVS(Multi-View Stereo)等在内的多种功能,广泛应用于三维
Ubuntu下COLMAP的编译与安装全攻略
文章目录 一、前言二、安装依赖库基本的依赖安装Ceres Solver安装不需要cuda支持需要cuda支持 三、编译colmap四、运行colmap五、总结 一、前言 在计算机视觉领域,colmap是一款功能强大的开源图像重建工具。它提供了包括SfM(Structure from Motion)、MVS(Multi-View Stereo)等在内的多种功能,广泛应用于三维

colmap gpu服务器安装
1.官方安装说明 https://colmap.github.io/install.html 后边有编译支持gpu的步骤!!! 2.sudo apt-get install libgtest-dev 3.cmakelists.txt 250行+ set(CMAKE_CUDA_ARCHITECTURES “native”) 4. sudo apt-get install libqt5core5
Colmap学习二:前端部分(特征点提取、匹配与剔除)
1 Colmap特征提取和描述 colmap一般使用sift-gpu,涉及的知识: 1.1 图像金字塔:DOG图像金字塔,再找极值 1.2 SIFT特征检测与描述:确定主方向和128维的描述子,再归一化(消除光照的影响)。 其中由于Euclidean distance 容易受较大值的影响,使用 Hellinger distance更稳定。colmap先对sift的结果进行L1 normal
COLMAP利用已知相机内外参重建NeRF的blender模型
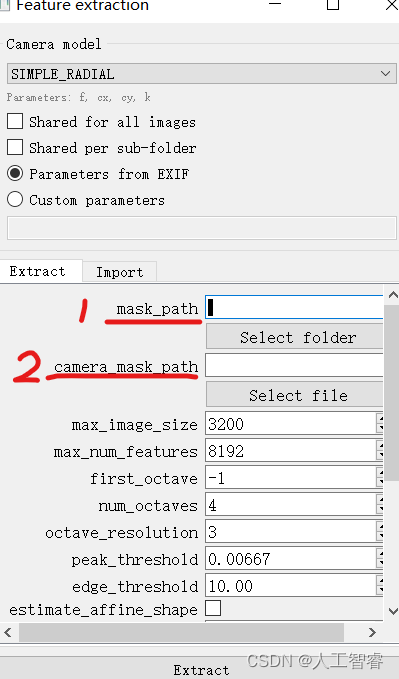
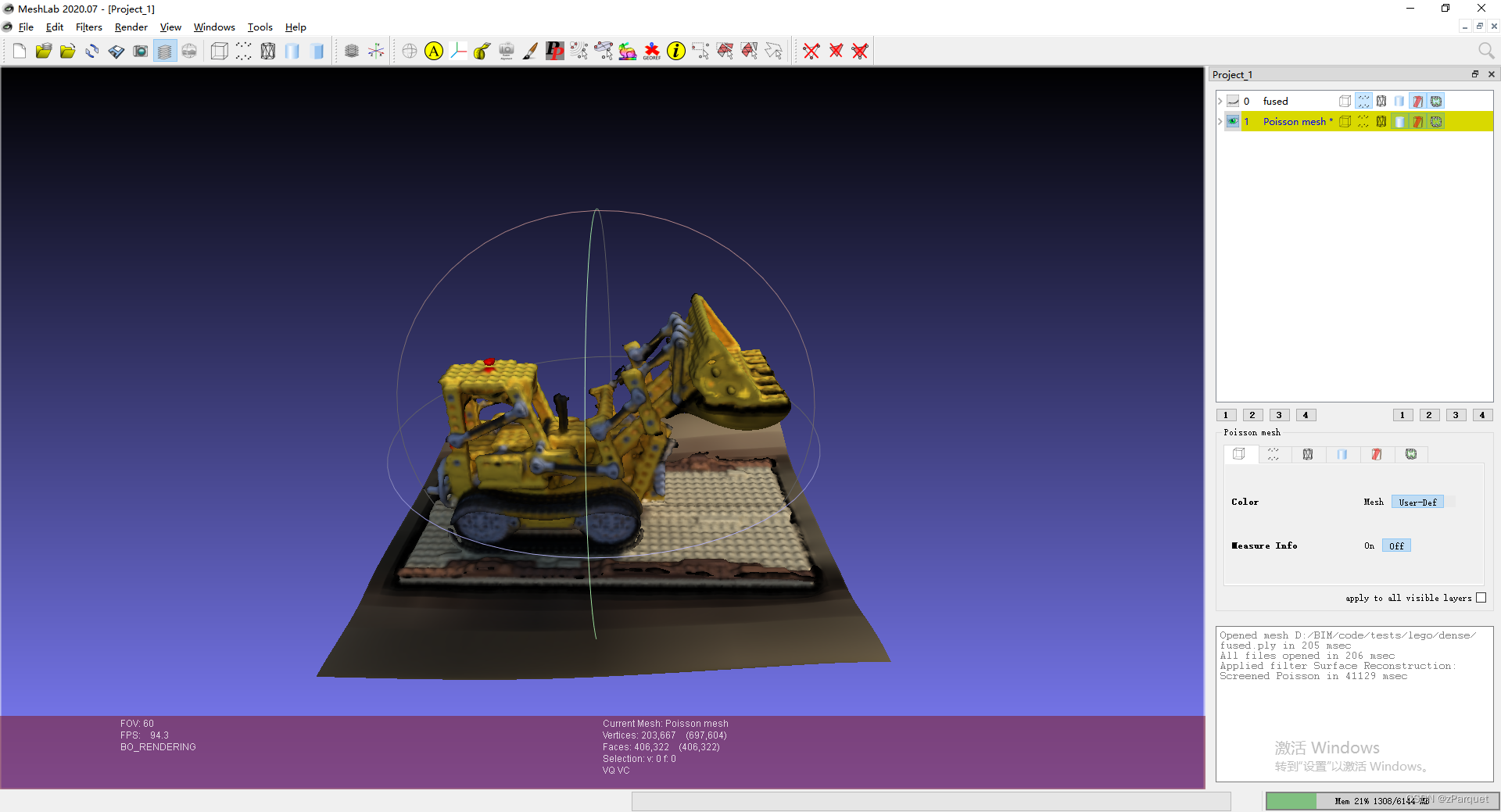
文章目录 前言一、数据准备二、从blender数据构造colmap数据集三、COLMAP重建流程1. 抽取图像特征2. 导入指定相机内参3. 特征匹配4. 三角测量5. 使用指定相机参数进行稠密重建6. 立体匹配7. 稠密点云融合8. 网格重建 总结 前言 本文的目的是根据已知相机参数的blender模型,使用colmap进行稀疏重建和稠密重建。使用的blender数据是Ne

colmap+openmvs进行三维重建流程全记录
windows下的colmap+openmvs进行三维重建流程全记录 1.colmap安装与配置 可参考:https://blog.csdn.net/weixin_44153180/article/details/129334018?spm=1001.2014.3001.5501 2.openmvs安装与配置 可参考:https://blog.csdn.net/rdw1246010462/

Ubuntu编译安装colmap遇到的几个问题以及解决
总体安装过程已经很明白了,写的人很多了,我就不赘述了,可以参考这里或者其他博客。我主要记录几个我遇到的问题以及解决方法。 1、cmake报错:No CMAKE_CUDA_COMPILER could be found. 这个原因是没找到cuda和nvcc目录,最简单的方法是在cmake的时候这样操作: cmake .. -DCMAKE_CUDA_COMPILER:PATH=/usr/loca
COLMAP安装问题汇总
问题目录 问题0、没有root权限怎么安装colmap?问题1、ERROR: SiftGPU not fully supported/Could not connect to any X display问题2、Cannot specify include directories for imported target "freeimage::FreeImage".问题3、could not

colmap Died with <Signals.SIGKILL: 9>解决方法
我尝试通过Windows的WSL子系统运行COLMAP,标定相机位姿并重建稀疏点云,但是运行的过程中,总是在patch_match_stereo阶段出现:died with <Signals.SIGKILL: 9>。 通过查询资料,发现可能是因为内存不足导致程序异常崩溃。 本人的内存是32GB,但是Windows默认设置WSL可使用的内存容量为总容量的50%,也就是16GB。 需要在Wind