collision专题

urdf ( xacro ) 的 collision碰撞参数设置
目录 写在前面的话整体流程1 URDF 文件结构2 查看原始碰撞形状描述3 加入简单碰撞形状描述方法一 Meshlab 自动测量方法二 人为测量 4 加入XACRO函数简化描述 最终结果展示侧视图正视图碰撞几何体中心点设置不对出现的结果 写在前面的话 本文使用的 URDF 文件是由 solidworks 的 URDF export 插件生成,详情请看上一篇文章:solidwor

【pwnable.kr】0x02-collision Writeup
题目描述 解法 拉取文件 scp -P2222 col@pwnable.kr:col .scp -P2222 col@pwnable.kr:col.c . 分析源码 #include <stdio.h>#include <string.h>// hashcode值unsigned long hashcode = 0x21DD09EC;// 返回res,对main函数中传参进

2020杭电多校第三场 Triangle Collision(计算几何,坐标翻转,镜像对称)
题意: 一个小球在一个等边三角形内碰撞,碰撞速度不比,方向沿边镜像翻折。求发送 k k k次碰撞需要多少时间 思路: 一开始想着是模拟,然后估摸着最后会形成循环,经过起始点。但是太难模拟了。。 看了题解发现,真的特别巧妙。反射意味着穿过!那么就成了全是等边三角形铺成的平面,已知起点和速度。求经过 k k k条边的最短时间。 这个时间可以二分。 仅考虑平行x轴的边,那就直接用 a b s ⌊

Unity之C#学习笔记(3):“吃掉”道具——碰撞事件的基本处理 Collision
前篇链接:Unity之C#学习笔记(2):键盘操控物体进行简单的移动 Simple Movement 在这一节,我们将通过一个"吃掉"道具的例子来看如何处理基本的碰撞事件。 续接上节,我们已经创建了一个可以用键盘控制上下左右移动的“Player”,接下来,我们来制作一个玩家可以“吃掉”的道具。新建一个物体Powerup作为“吃”的对象,同时新建一个用于控制这种被吃物品的脚本Collectabl

记录自己完整的实现过程 Collision-Free Video Synopsis Incorporating Object Speed and Size Changes
Collision-Free Video Synopsis Incorporating Object Speed and Size Changes 代码自己的实现过程 论文链接和代码链接实现过程第一步 解压video.7z第二步 配环境opencv 3.1.0vs2017vs2017里面配opencv 修改代码其他问题 论文链接和代码链接 代码链接:https://github
Unreal 入门-Collision和Physics,碰撞检测
Collision仅仅掌管碰撞发生的检测和回调,而Physics仅仅模拟碰撞发生之后位置速度等等的变化。 Collision 可以设置persets,里边的标签都是不同的碰撞处理逻辑。Collision仅仅检测是否碰碰撞和回调一些碰撞处理函数。 CollisionEnable管理检测决定可以碰撞之后,是仅仅发生overlap回调、raycast(射线拾取)、sweep(扫描建模)还是有
UE4中的Collision Presets理解
最近在研究UE4物理碰撞模块,Block,Overlap,Ignore都能理解,Collision response 和一些触发事件也能理解,唯独对Collision Presets,Collision和Object Type很不理解,网上找了很多文章,终于有了一知半解,记录下来,供自己和大家参考。 先说Collision Presets,如果你想对Actor自定义碰撞设置,那么
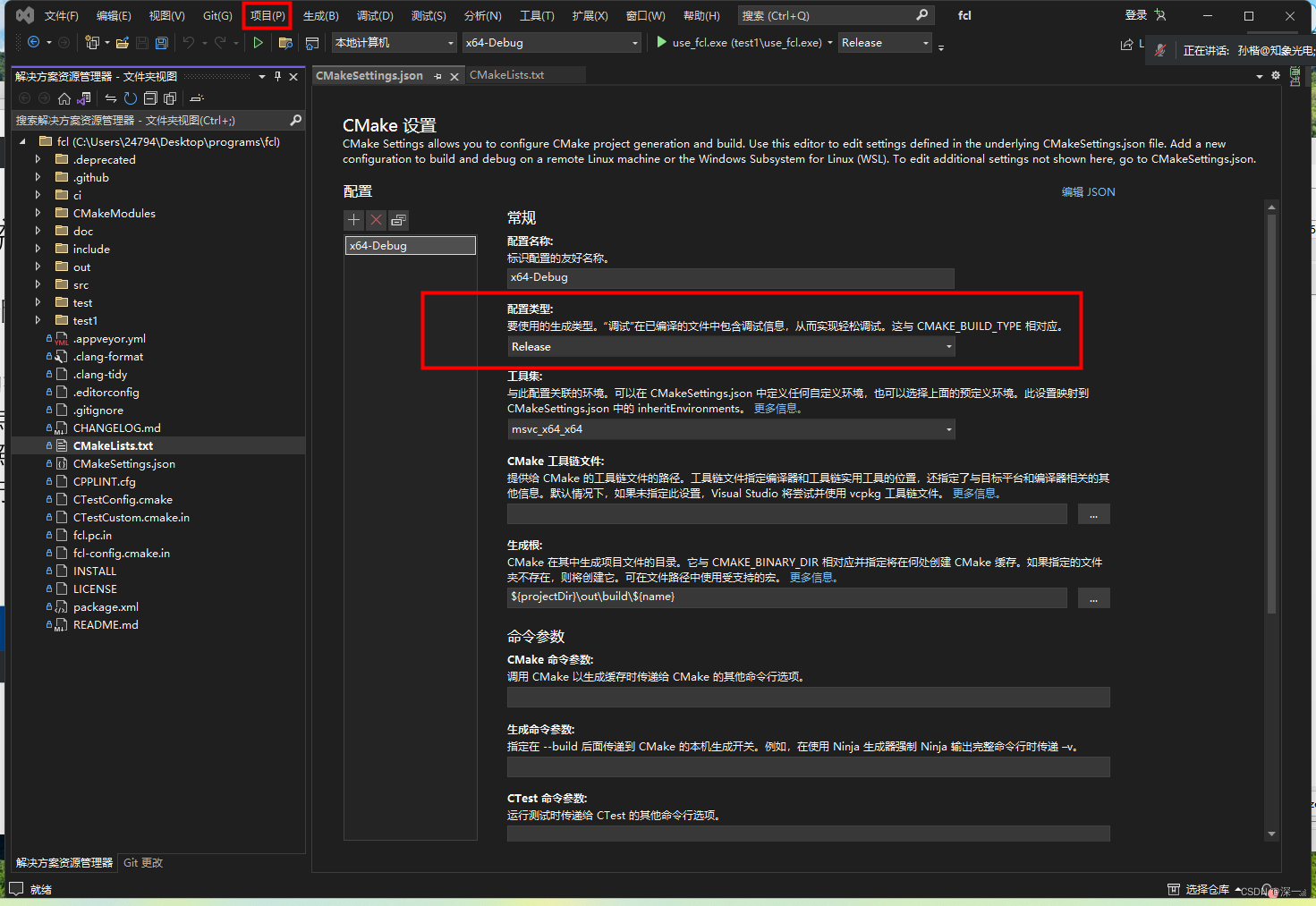
windows下使用FCL(Flexible-collision-library)
windows下使用FCL(The Flexible-collision-library) FCL做为一款开源的碰撞检测库,支持多种基础的几何体,及支持C++和python,在windows和linux平台均可以使用。是一款计算高效的碰撞检测工具。在机械臂规划控制框架moveit中做为基础的碰撞检测算法。 FCL支持的几何体类型: box (长方体)sphere(球)ellipsoid(
使用传感器融合的前方碰撞预警-(Forward Collision Warning Using Sensor Fusion)
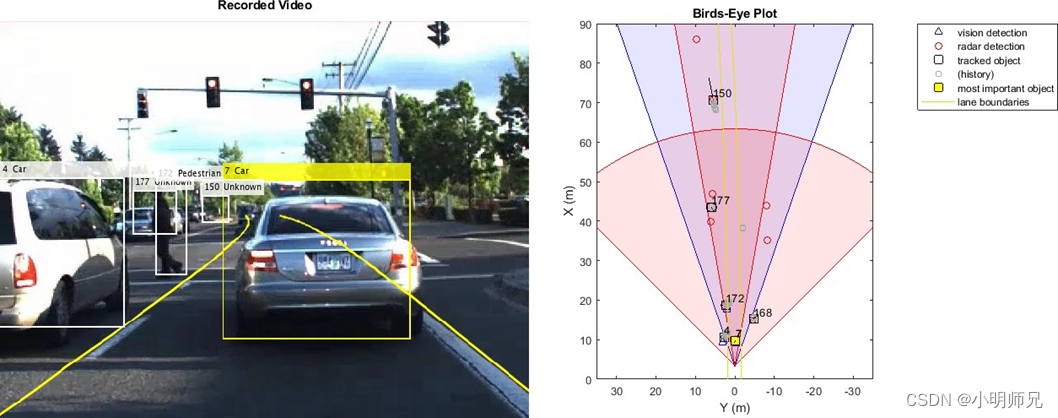
这个例子matlab自动驾驶工具箱中关于使用传感器融合的前方碰撞预警-(Forward Collision Warning Using Sensor Fusion)例子,其展示了如何通过融合视觉和雷达传感器的数据来跟踪车辆前方的物体,从而实现前向碰撞预警系统的开发与验证。 1 概述 前方碰撞预警(FCW)是驾驶辅助系统和自动驾驶系统中的一项重要功能,其目标是在即将与前车发生碰撞之前,向驾驶员提
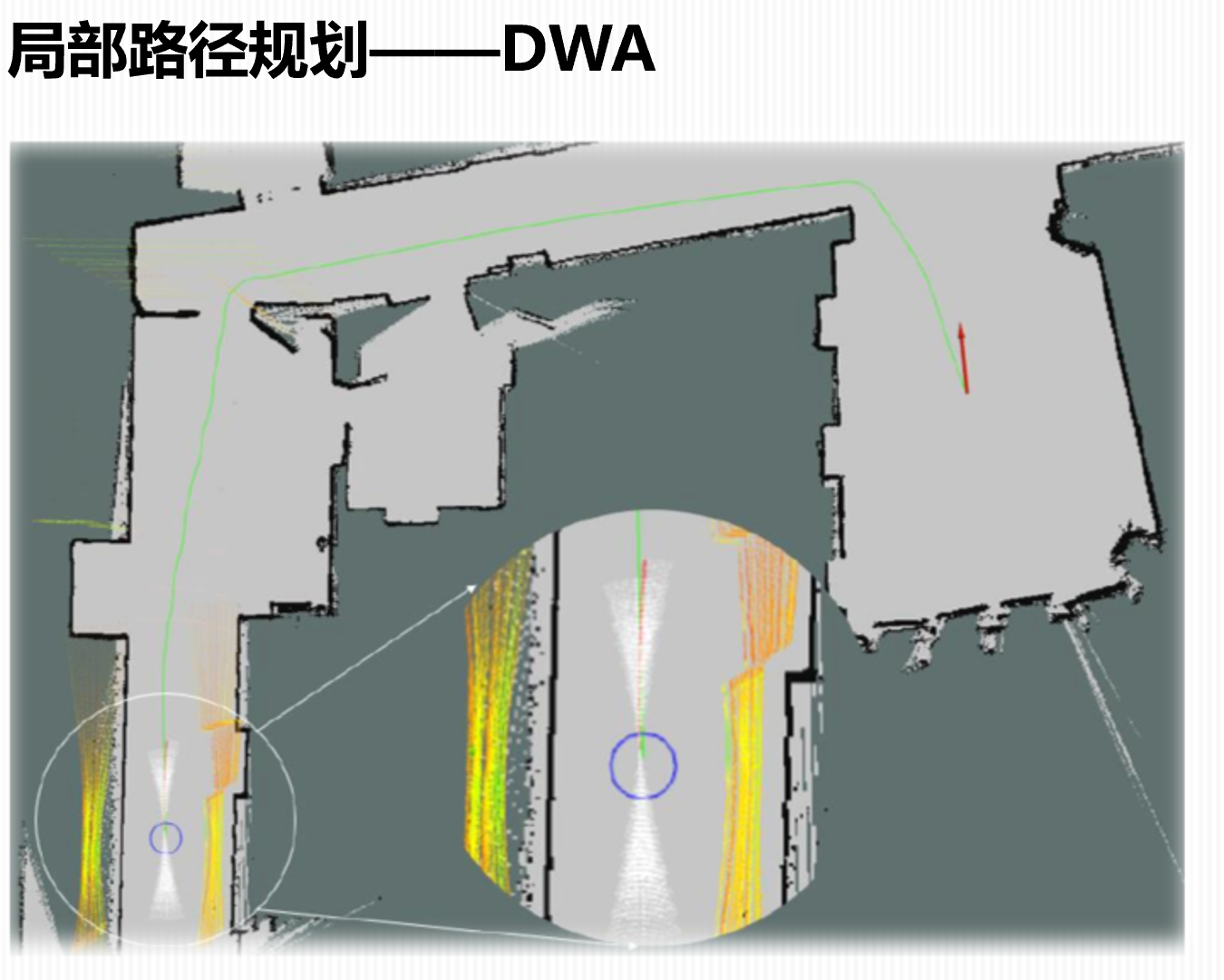
【路径规划】 The Dynamic Window Approach to Collision Avoidance (附python代码实例)
引用与前言 参考链接 引用参考如下: 博客园解释:https://www.cnblogs.com/dlutjwh/p/11158233.html 这篇博客园写的贼棒!我当时就是一边对着论文一边对着他这篇来看的,所以==大部分论文的文字也来源于此== 原文论文:https://ieeexplore.ieee.org/document/580977 没有账号的话 就去sci-hub吧,这

UE4中的Collision Channels
从官方社区中看到了这篇文章,感觉很不错,下面贴出地址: https://www.unrealengine.com/zh-CN/blog/collision-filtering