ch02专题

【小白自学笔记】【机器学习实战】【Python代码逐行理解】CH02
第一个给出的是一个非常简单的例子:给出四个训练集数据(0,0)(0,0.1)【A类】(1,1)(1,1.1)【B类】 然后让你输入一个数字判断从属于A类还是B类 方法也很简单粗暴,离这个点的距离近的3个【k个】点,属于标签A的多,就判给A,B的多就判给B 问题:距离怎么算? 方法很简单:欧氏距离。 好了。所以我们代码的核心就是写出这个欧氏距离, 涉及到几点注意点:1.要根据训练集
![[深度学习]Part2 K临近算法(KNN)Ch02——【DeepBlue学习笔记】](https://img-blog.csdnimg.cn/469fe060dc0d4d5a8a510f041b3ec35e.png)
[深度学习]Part2 K临近算法(KNN)Ch02——【DeepBlue学习笔记】
本文仅供学习使用 K临近算法(KNN)Ch02 1. KNN算法原理1.1 案例分析1.2 KNN三要素1.3 KNN分类预测规则1.4 KNN回归预测规则 2. KNN算法法实现方式2.1 KD Tree2.1.1 KD Tree构建方式2.1.1 KD tree查找最近邻 2.2 KNN参数说明 3. KNN代码3.1 KNN参等权分类3.2 KNN加权分类3.3 KNN训练3.
算法提高 ADV-114 c++_ch02_03
编写程序实现“剪刀,石头,布”游戏。在这个游戏中,两个人同时说“剪刀”,“石头”或“布”,压过另一方的为胜者。规则是:“布”胜过“石头”,“石头”胜过“剪刀”,“剪刀”胜过“布”。要求:选择结构中使用枚举类型,结果的输出也使用枚举类型表示。 输入:两个数,范围为{0,1,2},用空格隔开。0表示石头,1表示布,2表示剪刀。这两个数分别表示两个人所说的物品。 输出:如果前者赢,输
算法提高 ADV-113 c++_ch02_0
使用Switch语句编写一个模拟简单计算器的程序。依次输入两个整数和一个字符,并用空格隔开。如果该字符是一个“+”,则打印和;如果该字符是一个“-”,则打印差;如果该字符是一个“*”,则打印积;如果该字符是“/”,则打印商;如果该字符是一个“%”,则打印余数。打印结果后输出一个空行。 import java.io.BufferedReader;import java.io.IOExc
![[足式机器人]Part2 Dr. CAN学习笔记 - Ch02动态系统建模与分析](https://img-blog.csdnimg.cn/direct/630219cc3a314904ba754366a8add31b.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记 - Ch02动态系统建模与分析
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Ch02动态系统建模与分析 1. 课程介绍2. 电路系统建模、基尔霍夫定律3. 流体系统建模4. 拉普拉斯变换(Laplace)传递函数、微分方程4.1 Laplace Transform 拉式变换4.2 收敛域(ROC)与逆变换(ILT)4.3 传递函数 Transfer Function 5. 一阶系统
![[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-3流体系统建模](https://img-blog.csdnimg.cn/direct/2e31fc16d6f94250a231b6dc8eeb2b9f.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-3流体系统建模
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-动态系统建模与分析 Ch02-1+3流体系统建模 流量 flow rate q q q m 3 / s m^3/s m3/s 体积 volume V V V m 3 m^3 m3 高度 heigh h h h m m m 压强 pressure p p p N / m ( p
![[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-6频率响应与滤波器](https://img-blog.csdnimg.cn/direct/f9a8fa930fc6421dbcd62135ce82cce5.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-6频率响应与滤波器
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-动态系统建模与分析 Ch02-6频率响应与滤波器 1st order system 一阶系统 低通滤波器——Loss Pass Filter
![[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-4 拉普拉斯变换(Laplace)传递函数、微分方程](https://img-blog.csdnimg.cn/direct/505eb9c10e82445dbc91f8169ffe0ebd.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-4 拉普拉斯变换(Laplace)传递函数、微分方程
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-动态系统建模与分析 Ch02-4 拉普拉斯变换(Laplace)传递函数、微分方程 1. Laplace Transform 拉式变换2. 收敛域(ROC)与逆变换(ILT) 1. Laplace Transform 拉式变换 f ( t ) → F ( s ) f\left( t \righ
![[足式机器人]Part4 南科大高等机器人控制课 Ch02 Rigid Body Configuration and Velocity](https://img-blog.csdnimg.cn/direct/4d03b6ad193f40968f29c1577f121f8b.png)
[足式机器人]Part4 南科大高等机器人控制课 Ch02 Rigid Body Configuration and Velocity
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch02 Rigid Body Configuration and Velocity 1. Rigid Body Configuration1.1 Special Orthogonal Group1.2 Use of Rotation M

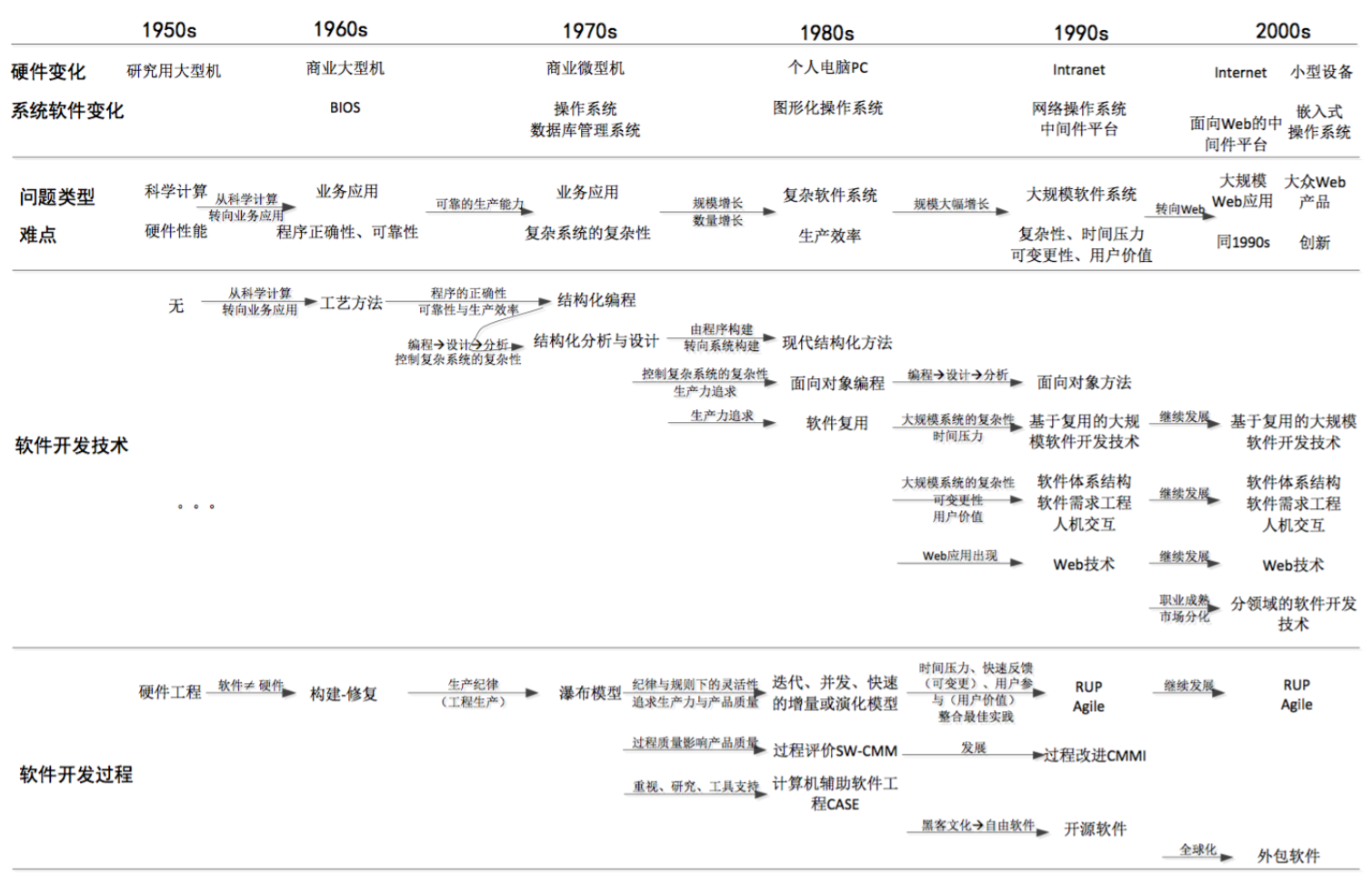
软件工程II-ch02-软件工程的发展
02-软件工程的发展 1. 软件工程的三个环境因素 1.1. 现实1.2. 抽象软件1.3. 虚拟机 2. 软件发展历程3. Before 1950s 软件是硬件一部分4. 年代:1950s 4.1. 软件工程和硬件工程是一样的4.2. 发展过程4.3. 机器为中心4.4. 软件发展方法4.5. 软件发展过程4.6. 总结 5. 年代:1960s 5.1. 过程5.2. 两个重要的诉讼案5.3.