centernet专题

CenterNet文字检测
原文:CenterNet文字检测 - 知乎 (zhihu.com) 一、Anchor-Free模型 目前在目标识别模型中,无论是单阶段算法(如RetinaNet、SSD、YOLOV3)还是两阶段算法(如Faster RCNN),都依赖与预定义锚框(anchor box)来实现。 通过预定义锚框所实现的模型称为Anchor模型。相反,没有使用预定义锚框所实现的模型叫做Anchor-Free模型

win10+cuda10.0+pytorch1.4测试CenterNet
整理好的代码和权重都在百度云链接,记得这个是被我加了lib的路径的,直接运行demo.py即可。 链接:https://pan.baidu.com/s/18hBS21hF1znXJkDyneELTw 提取码:f4ws 一、下载好 CenterNet 源码 下载工程加速方式参考https://blog.csdn.net/u013066730/article/details/107164

2D环境感知CenterNet安装
项目地址: https://github.com/xingyizhou/CenterNet 搭建环境并配置CenterNet 这一步主要参考文档INSTALL.md, 但请注意以下几点, 可以避免一些问题。 1. 在文档第1歩中, 若cuda版本是10.0之后的, 使用 conda install pytorch=1.0 torchvision -c pytorch 安装1.0以上的p
DeepDriving | 经典的目标检测算法:CenterNet
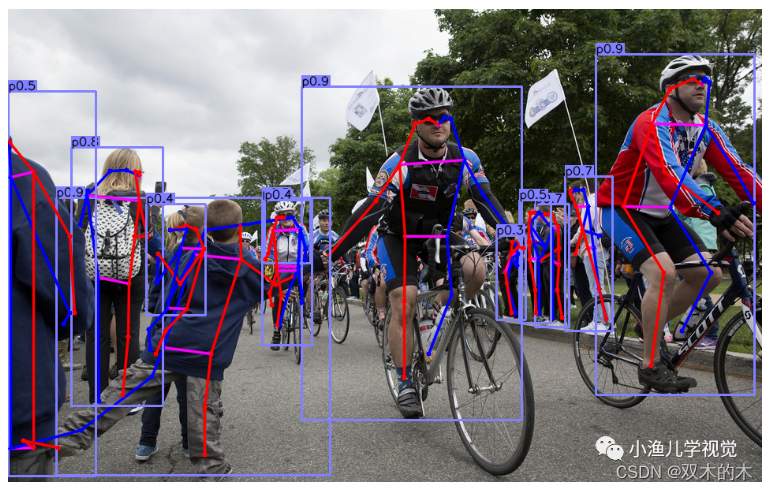
本文来源公众号“DeepDriving”,仅用于学术分享,侵权删,干货满满。 原文链接:经典的目标检测算法:CenterNet 1 前言 CenterNet是2019年发表的一篇文章《Objects as Points》中提出的一个经典的目标检测算法,该算法采用Anchor-Free的方式实现目标检测及其他一些扩展任务,非常值得研究。 2 主要思想 CenterNet将目标检测当做一个标
centernet笔记 - inference阶段后处理
预备知识,mxnet.ndarray的一些操作 shape_array shape_array([[1,2,3,4], [5,6,7,8]]) = [2,4] # 获取ndarry的shape# Returns a 1D int64 array containing the shape of data. split Splits an array along a particular
【踩坑】使用CenterNet训练自己的数据时的环境配置与踩坑
环境配置 系统:Ubuntu22.04 Python:3.8 CUDA:11.7 pytorch:2.2.1 因为种种原因没有使用原工程的老版本python和pytorch……但总之也跑通了,可喜可贺,可喜可贺。 新建conda环境: conda create --name CenterNet python=3.8conda activate CenterNet 安装CUDA
无人驾驶中的激光雷达(四)Pointpillar+CenterNet实现的3D点云目标检测网络
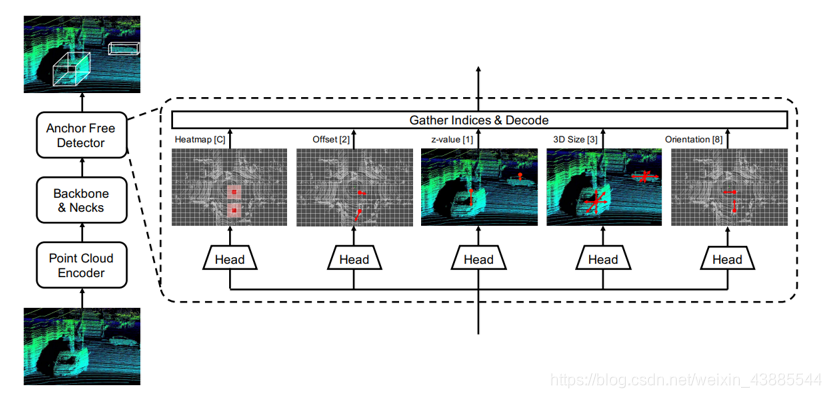
简要介绍 引言基本思路一一说明未完成的东西 引言 好久没总结过新东西了,这次就把最近自己通过拼凑代码实现的一个点云目标检测网络现在这做个总结吧。 不过我的网络还没来得及改进,大思想就和别人的撞车了,人家已经发了CVPR,对于自己这个半成品网络也没什么兴趣继续改进了。 CVPR2021的论文是: Center-based 3D Object Detection and Track
深度学习的数据格式转换(mobilenet+ssd,centernet)
深度学习的数据格式转换(mobilenet+ssd,centernet) 初步生成VOC2012数据集 1、数据标注 1.1有目标的图片标注 应用labelImg对图片进行标注,下载链接:https://github.com/tzutalin/labelImg 标注时,需要注意的点,(参考自https://blog.csdn.net/chenmaolin88/article/details
C# Onnx CenterNet目标检测
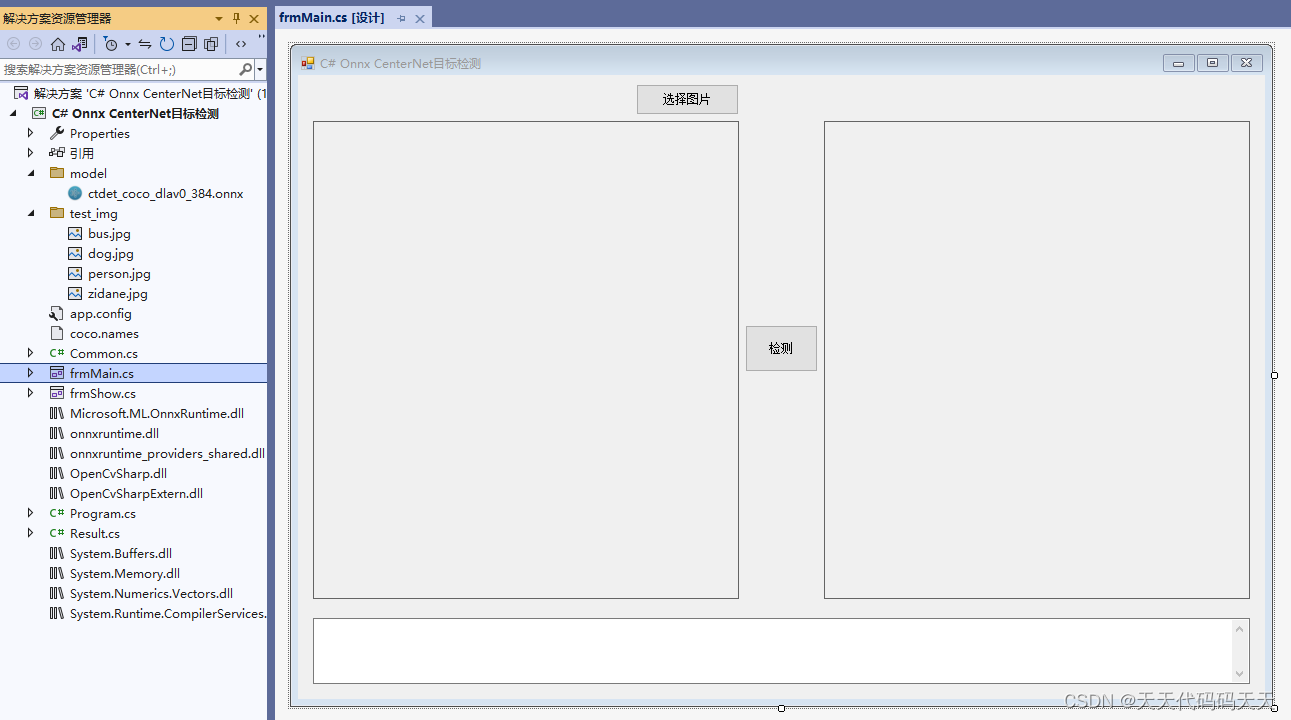
目录 效果 模型信息 项目 代码 下载 效果 模型信息 Inputs ------------------------- name:input.1 tensor:Float[1, 3, 384, 384] --------------------------------------------------------------- Outputs ------------
库位角点检测之Centernet/CornerNet算法
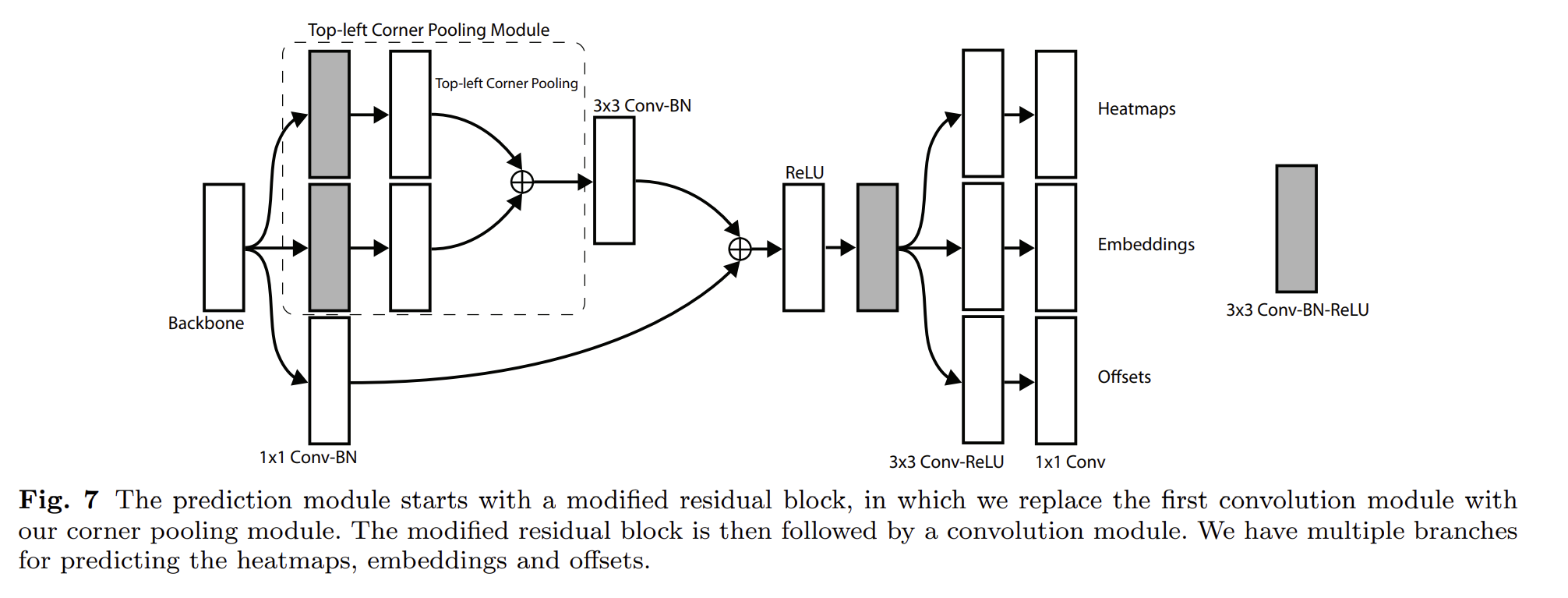
1.CornerNet CornerNet 那么我们从bounding box左上角(top-left corner)看物体。视线横着的话,物体就在视线的下面(那么视线所在位置为the topmost boundary of an object)。视线竖着的话,物体就在视线的右边,那么视线位置为the leftmost boundary。 我们每次都将沿着图中箭头方向上已遇到的最
【代码】CenterNet使用(续)(对五六七部分详解)(六)
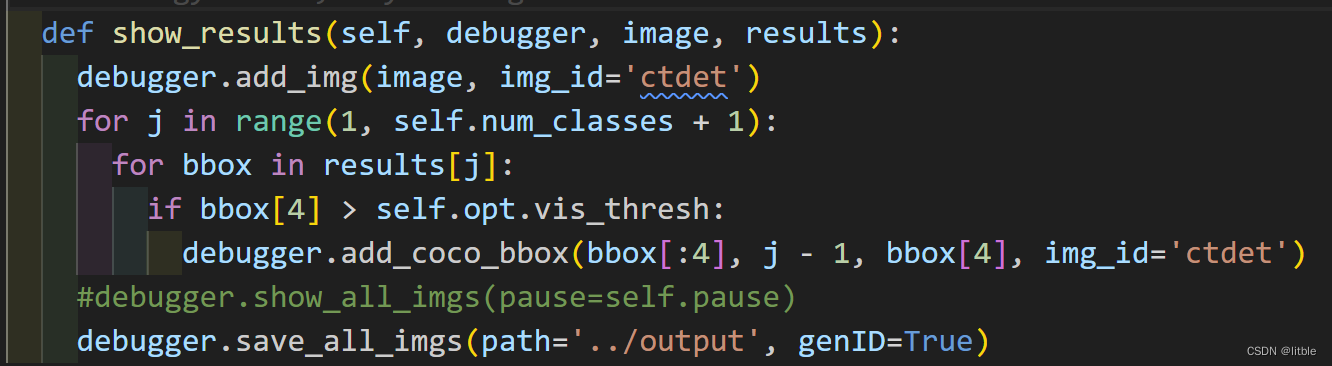
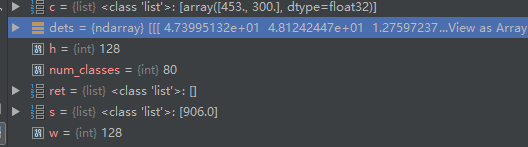
接上面部分,对五六七部分进行详解,这篇介绍第六部分。 一、回顾 第六部分对得到得dets进行后处理: dets = self.post_process(dets, meta, scale)torch.cuda.synchronize()post_process_time = time.time()post_time += post_process_time - decode_ti