cam专题

【Grad-Cam】pycaffe实现
python获取梯度脚本 # -*- coding: UTF-8 -*-import sysimport shutilimport ossys.path.insert(0, "caffe/python")import caffeimport numpy as npimport dicomimport cv2from scipy.misc import bytescalefr
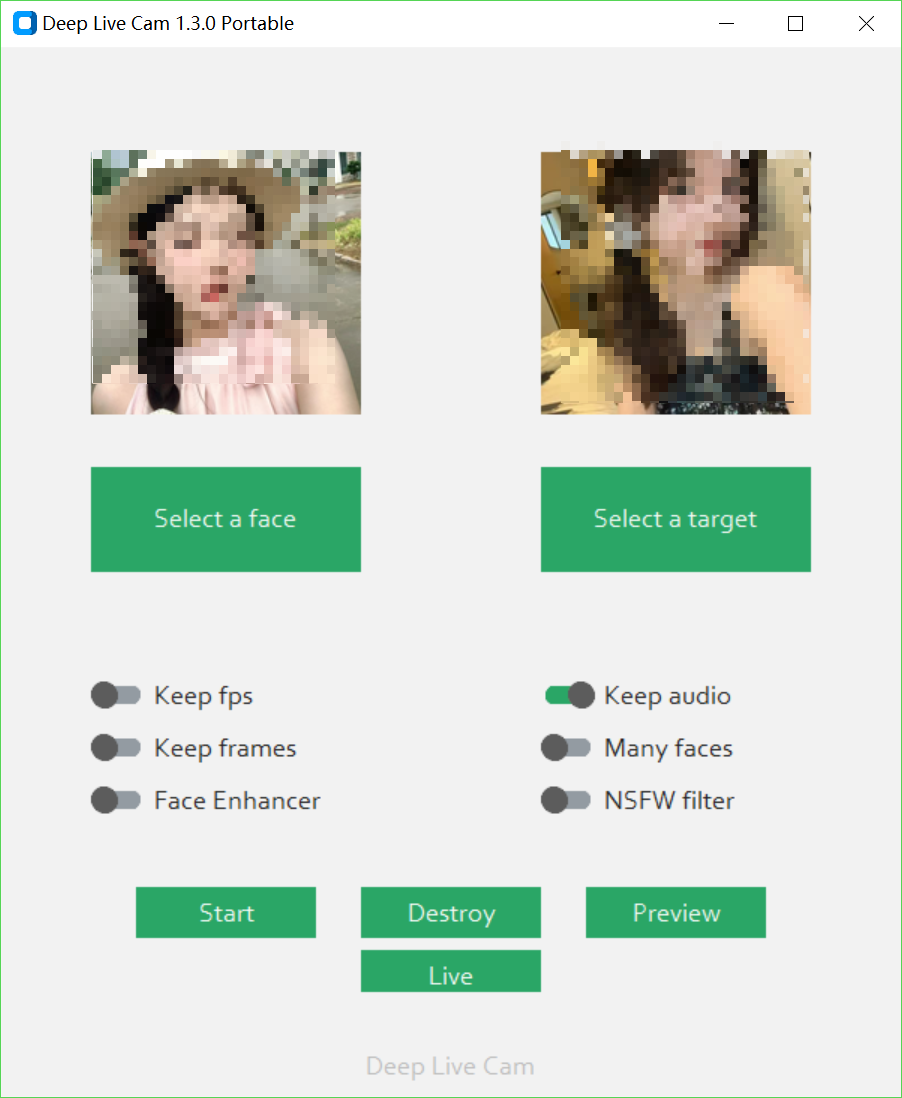
Deep-Live-Cam启动
实验环境 实验时间:2024年8月windows 10 专业版能跟老外对喷的网络环境基于 Anaconda 创建 Python 3.10.x 环境 其它依赖 下载生成工具:https://visualstudio.microsoft.com/zh-hans/visual-cpp-build-tools/安装单个组件:共三个。 安装ffmpeg。管理员身份打开Windows Powe

NX/UG二次开发—CAM—获取加工环境下所有程序组、刀具组、加工坐标系并输出名称
以下代码为CAM所有程序组、刀具组、加工坐标系并输出名称 源文件在群共享文件中。(QQ群:1023204977)
NX/UG二次开发—CAM—获取刀轨最低点算法
找了半天帮助文档,没有找到关于刀轨加工Z向最低点的函数,既然没找到,那就换个方法。可以用UF_SETUP_generate_clsf导出程序的刀轨文件,然后再刀轨文件里遍历“GOTO”语句,查看最小的Z值。注意打孔的话还需要找到“CYCLE”语句后面的深度值,用最小Z值减去深度值。 按照这个思路,试运行一下,发现结果没问题。后来编制一个G18\G19的圆弧刀轨,发现出现BUG,因为圆弧的GOTO

NX/UG二次开发—CAM—用户自定义刀轨(UDOP)+ 螺旋铣用例教程 + 源码
用户定义刀轨是指:在需要一种无法由标准制造处理器完成的加工方法时,使用NX以外的处理器生成刀具路径的操作。这可能是你自己的或第三方的代码。入口函数udop。以下是程序框架,可以往里面添加你的代码 extern void udop(char *param, int *status, int parm_len) { char

编写一款2D CAD/CAM软件(十九)点选图形
点选图元原理 设定鼠标敏感范围,比如选中鼠标点击位置5个像素内距离最近的图元;当鼠标点击时,求解点击位置在几何坐标系下坐标点与附近几何图元的距离;如果到图元距离小于设定的鼠标敏感范围,则视为图形可选中;进一步,如果多个图元满足被选中的条件,则只选中距离最近的图元(根据需求也可设定满足条件图元全部选中,如本文实例)。 数学方法 点到点的距离:笛卡尔坐标系下点到点距离求解方法。点到直线最短距离
弱监督语义分割-对CAM的生成过程进行改进3
三、擦除图像高响应部分以获取更多的分割领域 ECS-Net: Improving Weakly Supervised Semantic Segmentation by Using Connections Between Class Activation Maps(ICCV,2021) 1.引言 我们首先从图像中擦除高响应区域,并生成这些擦除图像的新 CAM。然后,我们从新 CAM 中抽样可靠

Grad-CAM(梯度加权类激活图)
Grad-CAM(Gradient-weighted Class Activation Mapping)是一种可视化技术,用于解释卷积神经网络(CNN)的决策过程。它通过生成类激活图(Class Activation Map,CAM)来突出显示对网络预测贡献最大的图像区域。以下是Grad-CAM的基本原理和流程: 原理: 梯度计算:Grad-CAM利用了神经网络在输出层对特定类别的梯度。这些梯
esp32-cam 1. 出厂固件编译与测试
0. 环境 - ubuntu18 - esp32-cam - usb转ttl ch340 硬件连接 esp32-camch340板子U0RTXDU0TRXDGNDGND5V5V 1. 安装依赖 sudo apt-get install vimsudo apt install gitsudo apt-get install git wget flex bison gperf
iOS_TUTK_Kalay Cam+项目替换最新的IOTCamera.framework时,build failed解决方法
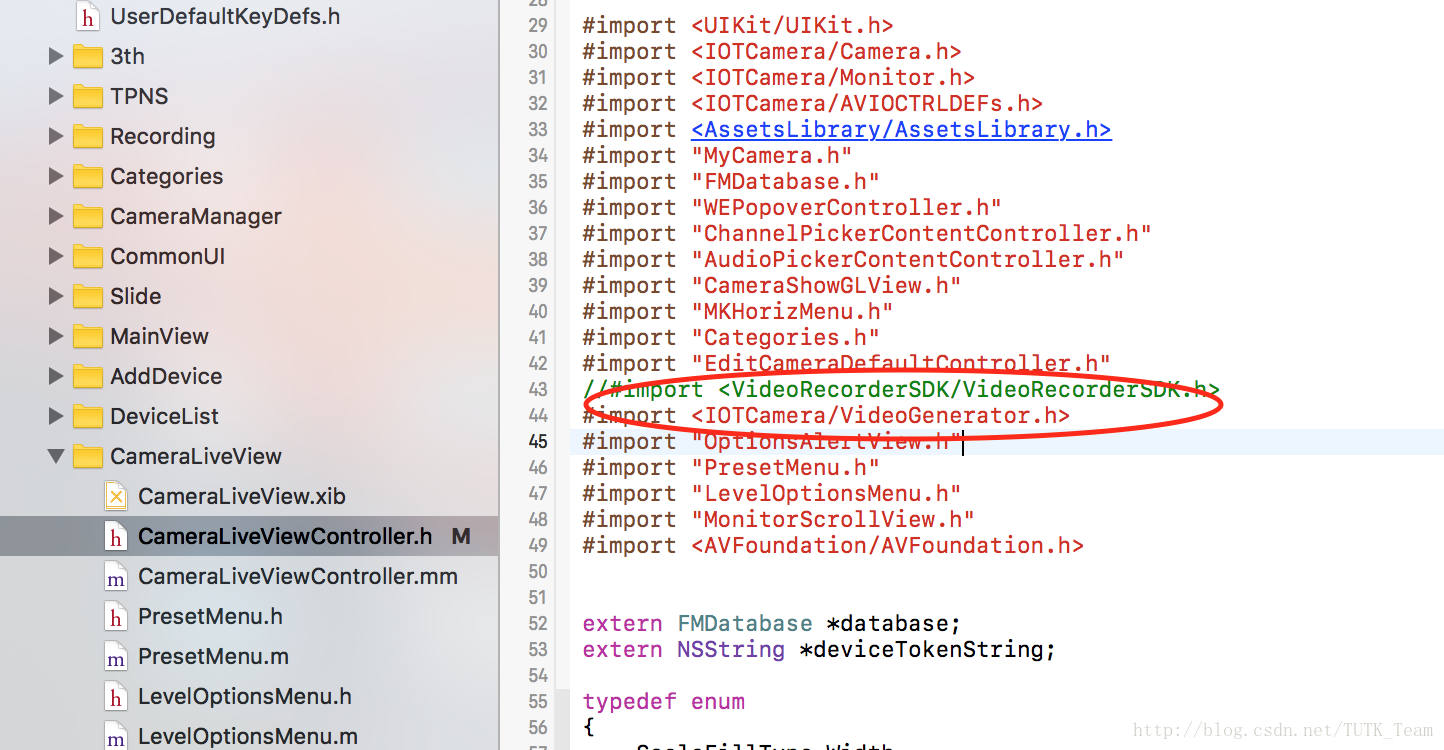
1、问题现象: 老的Kalay Cam+项目项目在用最新的IOTCamera.framework时,会出现build failed情况 2、问题分析: 新的IOTCamera.framework将VideoGenerator.h加入进去与原先本地的存在的VideoRecorderSDK.framework冲突导致 3、问题解决: a、替换../lib文件夹中的IO
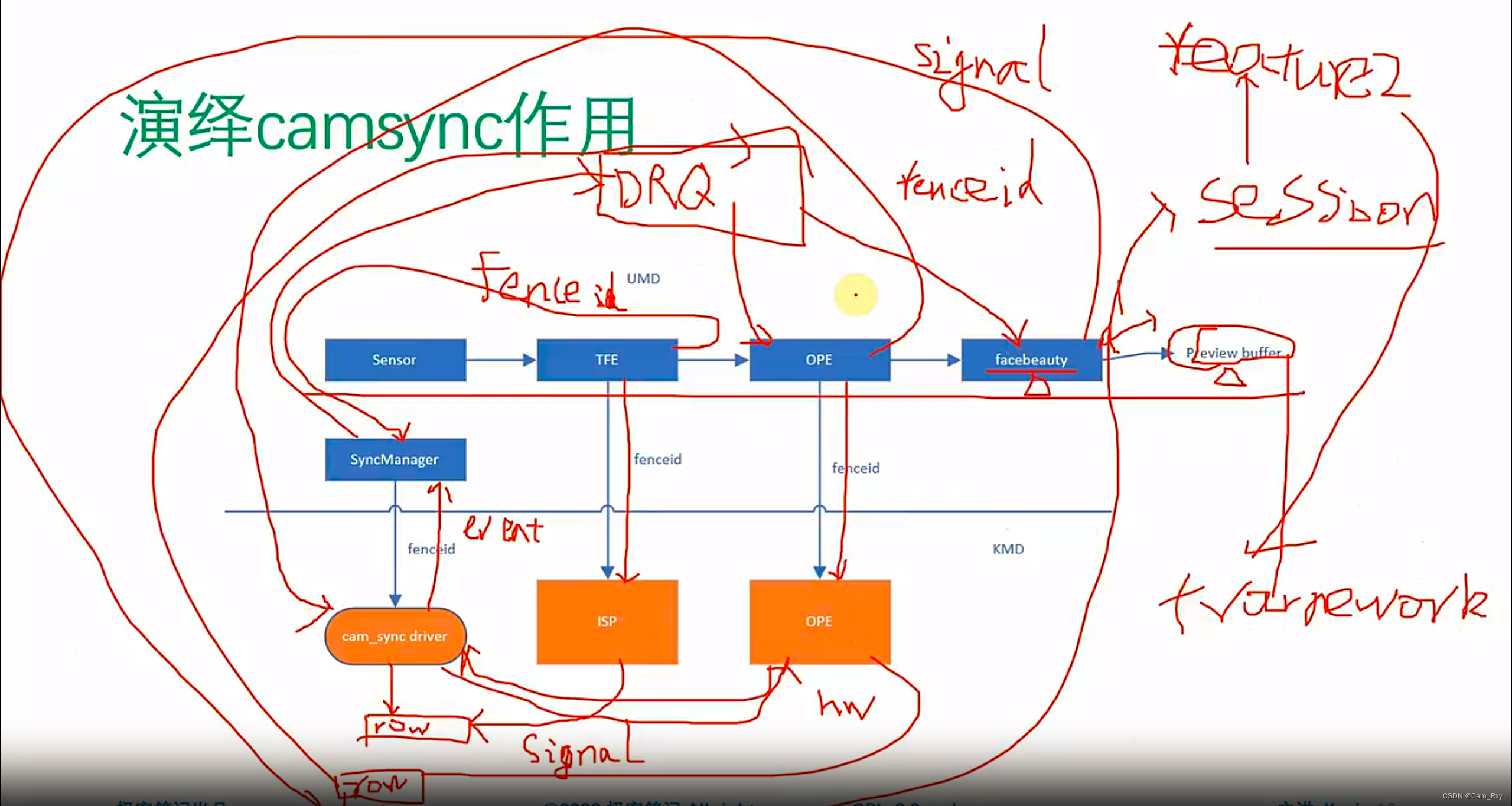
【Camera KMD ISP SubSystem笔记】CAM SYNC与DRQ①
在android系统中fence用于不同模块需要访问同一块buffer的同步,例如camera和graphic。对于preview buffer, camera是生产者graphic是消费者。 camera需要生产图像数据到preview buffer时需要等待preview buffer的 fence可用。 camera sync是高通camx框架里面用于各个node之间进行buff
3D开发工具HOOPS助力CAM软件优化制造流程
在现代制造业中,计算机辅助制造(CAM)软件的发展已成为提高生产效率和产品质量的关键。为了满足不断增长的需求和日益复杂的制造流程,CAM软件需要具备高效的CAD数据导入、云端协作、移动应用支持以及丰富的文档生成能力。 Tech Soft 3D的HOOPS软件开发工具包(SDK)为尖端CAM软件的开发提供了强大支持,本文将介绍如何利用HOOPS组件技术来增强下一代CAM应用程序的能力。

ESP32-cam使用-智能家居云端视频监控实现
本来准备花这个周末实现云端监控的,没想到一晚上实现了,但美中不足的是由于我的个人服务器带宽实在太低,如果要实现较为完整流畅的视频监控,得3m以上的带宽才能成功吧,所以该项目便没有接入我的服务器了,而是采用了内网穿透模式,去获取ESP32-cam视频流数据。 还是习惯先贴视频吧 智能家居-基于mqtt协议的云端家居视频监控 对了,可能有的朋友觉得我应该贴点详细的过程或者介绍什么的
ESP32-CAM+PIR传感器=动作抓拍监控
在《如何检测活人(一):PIR人体红外传感器》中我们介绍了PIR红外传感器的基本原理以及如何使用Arduino读取PIR信号的基本操作。本篇我们来稍微衍生一下,看看之前介绍过的ESP32-CAM如何结合PIR传感器快速实现一个能检测人体动作并立即抓拍保存照片的安防设备。 本文翻译自国外文章,略有删减,原文请点击底部链接。 本教程中,我们将使用ESP32-CAM制作一个探测动作并抓拍的设备。当PI

【YOLOv5改进系列(10)】高效涨点----将CAM(上下文增强模块)添加到Neck特征融合模块当中
文章目录 🚀🚀🚀前言一、1️⃣ 添加位置二、2️⃣修改代码内容三、3️⃣参数量变化四、4️⃣实验结果4.1 🎓 替换掉SPPF实验结果4.2 ✨在Neck部分添加CAM 👀🎉📜系列文章目录 【YOLOv5改进系列(1)】高效涨点----使用EIoU、Alpha-IoU、SIoU、Focal-EIOU替换CIou 【YOLOv5改进系列(2)】高效涨
【YOLOv5改进系列(9)】高效涨点----使用CAM(上下文增强模块)替换掉yolov5中的SPPF模块
文章目录 🚀🚀🚀前言一、1️⃣ CAM模块详细介绍二、2️⃣CAM模块的三种融合模式三、3️⃣如何添加CAM模块3.1 🎓 添加CAM模块代码3.2 ✨添加yolov5s_CAM.yaml文件3.3 ⭐️修改yolo.py文相关文件 四、4️⃣实验结果4.1 🎓 yolov5基准模型4.2 ✨使用CAM的weight连接方式4.3 ⭐️用CAM的adaptive连接方式4.
【论文精读】CAM:基于上下文增强和特征细化网络的微小目标检测
文章目录 🚀🚀🚀摘要一、1️⃣ Introduction---介绍二、2️⃣Related Work---相关工作2.1 🎓 基于深度学习的对象检测器2.2 ✨多尺度特征融合2.3 ⭐️数据增强 三、3️⃣提议的方法3.1 🎓 具有上下文增强和特征细化的特征金字塔网络3.1.1 ☀️上下文增强模块☀️3.1.2 特征细化模块 🚀🚀🚀摘要 微小的物体

自己动手用ESP32手搓一个智能机器人:ESP32-CAM AI Robot
目录 介绍 硬件需求 软件需求 步骤 总结 源码下载 介绍 ESP32-CAM是一款集成了Wi-Fi和蓝牙功能的微控制器模块,同时还集成了摄像头接口,使其成为一个非常适合构建智能机器人的选择。在本项目中,我将向您展示如何使用ESP32-CAM模块构建一个简单的AI机器人,该机器人可以将视频流传输到Android设备并在Android设备上进行AI任务处理。 硬件需求
UG NX二次开发(C#)-CAM-采用内部函数获取drill操作的进给
CAM二次开发 第一章 UG NX二次开发(C#)-CAM-采用内部函数获取drill操作的进给 文章目录 CAM二次开发1、前言2、在高版本中打开drill加工模板3、读取drill加工操作3.1 用NXOpen的FindObject实现3.2、通过Collection集合获取3.3 通过选择工序导航器实现(Ufun和NXOpen混合编程)3.4 通过UF_OBJ_cycle_ob

【雕爷学编程】MicroPython手册之 OpenMV Cam DAC (数模转换)
MicroPython是为了在嵌入式系统中运行Python 3编程语言而设计的轻量级版本解释器。与常规Python相比,MicroPython解释器体积小(仅100KB左右),通过编译成二进制Executable文件运行,执行效率较高。它使用了轻量级的垃圾回收机制并移除了大部分Python标准库,以适应资源限制的微控制器。 MicroPython主要特点包括: 1、语法和功能与标准Python
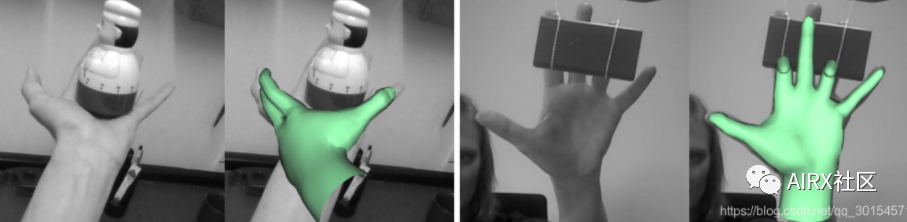
多目灰度cam手势追踪系统——MegaTrack
一、前言 本文是对Facebook Oculus发布的一篇VR方向(手势追踪)论文的解读。Oculus是一家做VR的公司,2014年被FaceBook收购了,本次参考的论文就是FaceBook Oculus团队的最新论文。论文2020年7月发表于SIGGRAPH。 因为最终是要给大家讲明白这个手势追踪是怎么实现的,所以我尽量不出现数学公式,尽量使用中文。 【补充】SIGGRAPH是什么?:S
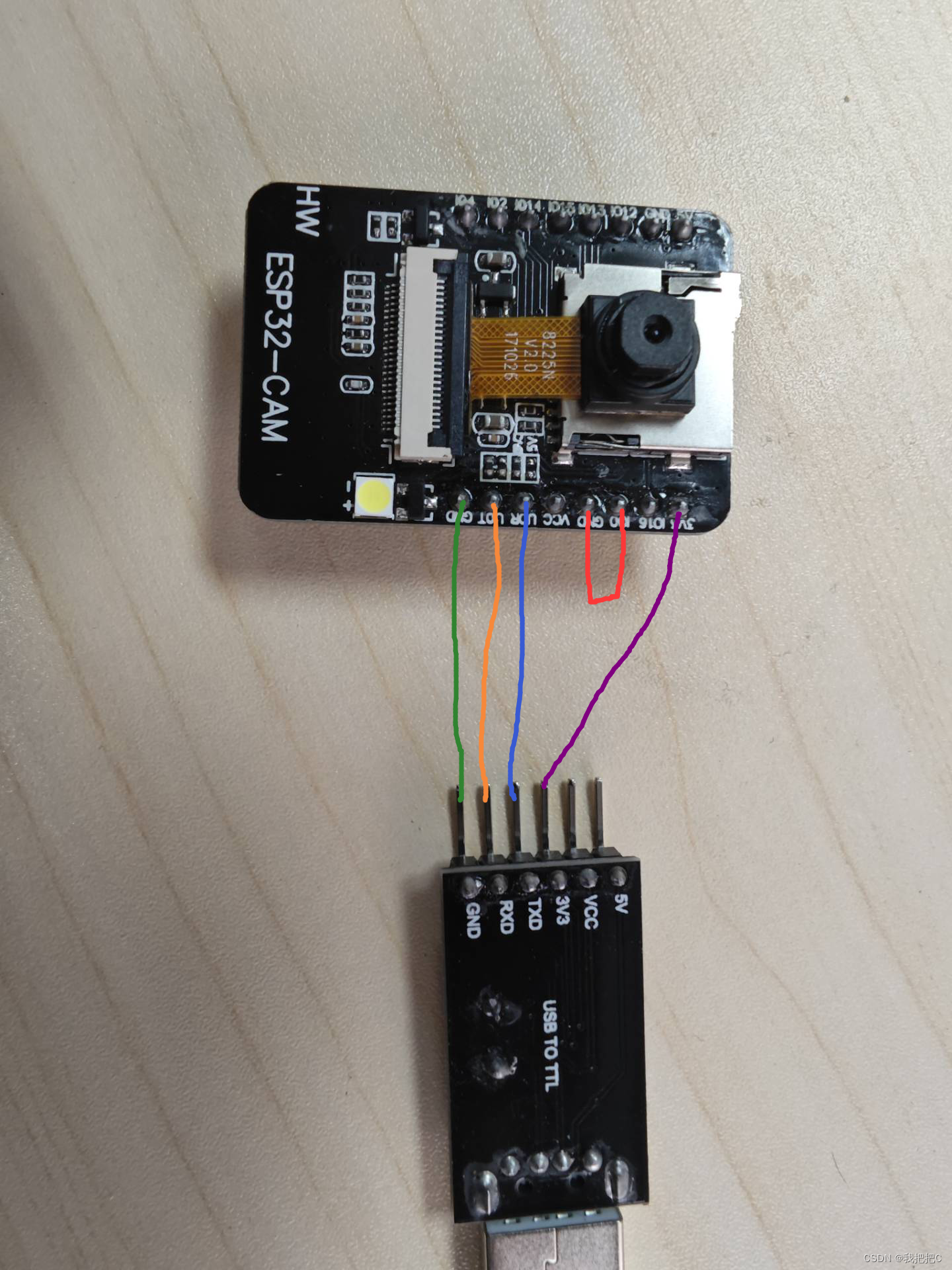
使用TTL直接对esp32-cam进行烧录
首先你要有一个usb转TTL下载器和一个esp32-cam 然后我们要将IO0与GND短接 UOR->TXD UOT->RXD 3V3->3V3 GND->GND

CAM论文笔记--Learning Deep Features for Discriminative Localization
CAM:Learning Deep Features for Discriminative Localization 背景 论文主要针对图片中不同类别物体定位的弱监督学习问题,提出了基于分类网络的图片识别与定位。 分类网络如VGGnet和Alexnet等基本由卷积操作对图片的特征进行提取,在网络末端使用全连接层进行信息综合和分类。在监督学习中,分类问题需要带类别标签的数据集,定位问题需

【雕爷学编程】Arduino智能家居之ESP32-CAM人脸识别门禁系统
Arduino是一个开放源码的电子原型平台,它可以让你用简单的硬件和软件来创建各种互动的项目。Arduino的核心是一个微控制器板,它可以通过一系列的引脚来连接各种传感器、执行器、显示器等外部设备。Arduino的编程是基于C/C++语言的,你可以使用Arduino IDE(集成开发环境)来编写、编译和上传代码到Arduino板上。Arduino还有一个丰富的库和社区,你可以利用它们来扩展Ard

【雕爷学编程】MicroPython手册之 OpenMV Cam 人脸识别门锁
MicroPython是为了在嵌入式系统中运行Python 3编程语言而设计的轻量级版本解释器。与常规Python相比,MicroPython解释器体积小(仅100KB左右),通过编译成二进制Executable文件运行,执行效率较高。它使用了轻量级的垃圾回收机制并移除了大部分Python标准库,以适应资源限制的微控制器。 MicroPython主要特点包括: 1、语法和功能与标准Python

esp32 cam+esp8266用micropython实现人脸识别开门
前言 前面文章讲了编译micropython的编译和图传,这篇记录一下我自己DIY人脸识别门锁的经验。 为什么用esp8266,因为比esp32便宜几块钱,批发甚至只要6块,哈哈 由于micropython我也刚上手,也是学一点记录一点,当帮大家提前踩坑了~ 废话不多说,直接上例子! --------------------------------------------------