auv专题

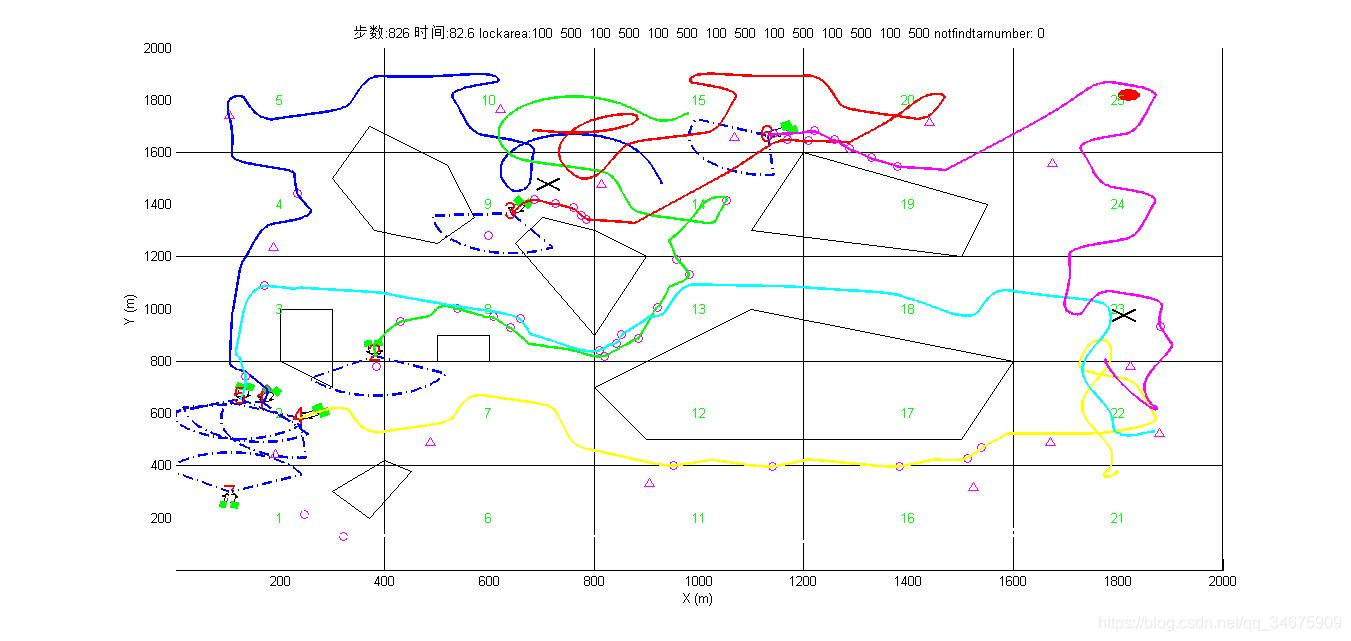
2-82 基于matlab的多种工况下融合EKF的AUV定位误差
基于matlab的多种工况下融合EKF的AUV定位误差,工况1:AUV工况2:应答器基阵+速度传感器+角度传感器;工况3:AUV和AUV+速度传感器+角度传感器;工况4:应答器基阵;工况5:AUV和AUV+速度传感器+角度传感器+应答器基阵。程序已调通,可直接运行。 2-82 EKF的AUV定位误差 - 小红书 (xiaohongshu.com)
AUV直线路径跟踪仿真-反步滑模方法
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 文章目录 前言 一、整体思路 二、控制器设计 1.纵向推力-反步法 2.转艏力矩-滑模方法 三、虚拟AUV速度推算 四、仿真实现 1.艏向制导误差和滑模面函数 2.控制器和模型解算 3.解耦速度得到艏向角和漂角 4.积分速度得到位置信息 5.得到位置误差和趋近角信息 6
![小型AUV控制系统开发笔记[一]基于STM32的消息中继器](https://img-blog.csdnimg.cn/20210225224527539.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L0Rldm91dF9wcm9ncmFtbWluZw==,size_16,color_FFFFFF,t_70)
小型AUV控制系统开发笔记[一]基于STM32的消息中继器
从2021-2-9开始到2021-2-25该项目基本完成,写一篇笔记算是记录也是纪念把。 第二句话,要感谢一下@iroek,他DE了程序里的所有BUG。如果说为什么要第二句话,因为如果可以的话他喜欢低调。 先来一张全家福 虽然小型AUV的控制算法是由运算能力较强的RK3399芯片完成的,但是在收集传感器数据、编写传感器驱动方面,在运行Linux内核的芯片上写起来不是很方便,于是便有了标题中

AUV路径跟踪滑模控制
一、参考文献 Modelling and Motion Control of an Underactuated Autonomous Underwater Vehicle Principles of Guidance-Based Path Following in 2D and 3D 二、仿真效果 三、源代码 (1)AUV模型 %p

【论文阅读】Multi-AUV Collaborative Data Collection Algorithm Based on Q-Learning in Underwater Acoustic S
文章目录 论文基本信息摘要1.引言2.相关工作A. 基于聚类算法的数据采集算法B. 基于AUV轨迹规划的数据采集算法 3.网络和通信模型A. 网络模型B. 问题描述C. 通信模式 4.THE QL-DGA ALGORITHMA. Overview of the QL-DGAB. Node Clustering PhaseC. AUV Task AllocationD. AUV Path Pl

m基于万能逼近原理自适应模糊控制算法的多自由度AUV运动控制抗干扰补偿simulink仿真
目录 1.算法仿真效果 2.算法涉及理论知识概要 3.MATLAB核心程序 4.完整算法代码文件 1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 自主水下航行器(Autonomous Underwater Vehicle,AUV)是一种具有自主性、灵活性、隐蔽性等优点的智能化设备,广泛应用于