autopilot专题

【PX4-AutoPilot教程-TIPS】PX4加速度计陀螺仪滤波器参数设置
PX4加速度计陀螺仪滤波器参数设置 前期准备滤波前FFT图滤波后FFT图 环境: 日志分析软件 : Flight Review PX4 :1.13.0 前期准备 进行滤波器参数设置的前提是飞机简单调试过PID已经可以稳定起飞,开源飞控的很多默认参数是可以让飞机平稳起飞的。 修改参数SDLOG_PROFILE,勾选High rate选项。以最大频率来记录数据,这就方便我们

【PX4-AutoPilot教程-TIPS】离线安装Flight Review PX4日志分析工具
离线安装Flight Review PX4日志分析工具 安装方法 安装方法 使用Flight Review在线分析日志,有时会因为网络原因无法使用。 使用离线安装的方式使用Flight Review,可以在无需网络的情况下使用Flight Review网页。 安装环境依赖。 sudo apt-get install sqlite3 fftw3 libfftw3-devs
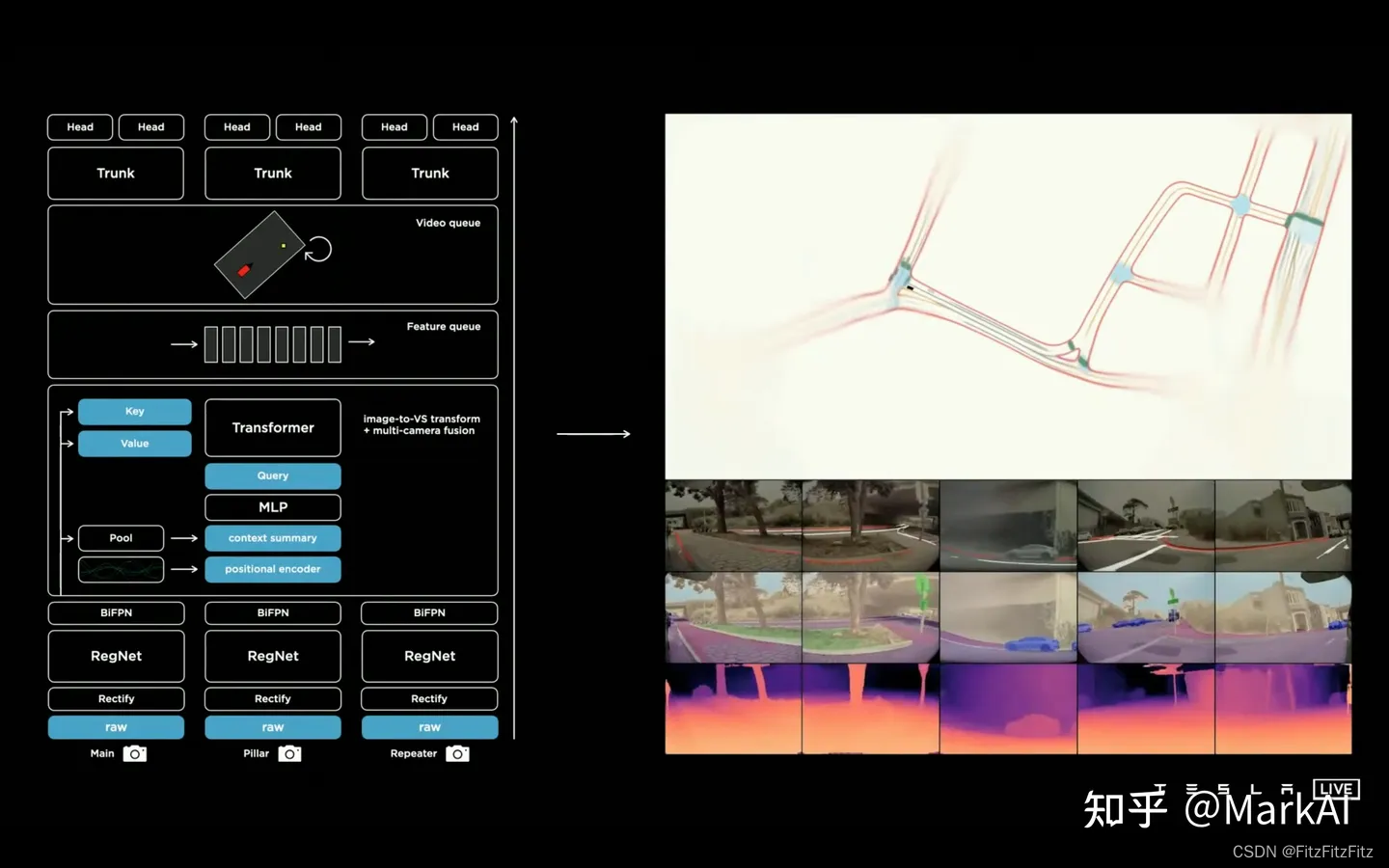
长文预警:九头蛇的进化——Tesla AutoPilot 纯视觉方案解析
九头蛇的进化:Tesla AutoPilot 纯视觉方案解析 前言 本文整理自原文链接,写的非常好,给了博主很多启发,投原创是因为平台机制,希望能被更多人看到。 嘿嘿,漫威粉不要打我←_←不是Hail Hydra,我要说的是Tesla AI day上他们的视觉方案,其核心模板的名字也叫HydraNet,很多设计非常有启发性,想和咱们自动驾驶从业者以及爱好者一起来学习交流下。 原视频链接

【PX4-AutoPilot教程-TIPS】PX4设置DMA通道后系统无法正常启动的解决方法
PX4设置DMA通道后系统无法正常启动的解决方法 问题描述解决方法 问题描述 进行PX4源码移植的时候修改PX4的DMA配置,主要是对nuttx-config/include/board_dma_map.h文件进行修改。 该文件用于配置DMA。DMA用来提供在外设和存储器之间或者存储器和存储器之间的高速数据传输。无须CPU的干预,通过DMA数据可以快速地移动,这就节省了CPU

【PX4-AutoPilot教程-TIPS】MAVROS2运行px4.launch文件报错ValueError无法启动的解决方法
MAVROS2运行px4.launch文件报错ValueError无法启动的解决方法 问题描述解决方法 环境: Ubuntu :20.04 LTS ROS :ROS2 Foxy PX4 :1.13.0 问题描述 在使用命令ros2 launch mavros px4.launch命令启动MAVROS2与PX4之间的连接时报错,无法启动MAVROS2,报错信息如下。 h

【PX4-AutoPilot教程-TIPS】PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法
PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法 问题描述解决方法 问题描述 无人机在Gazebo中飞行时,无人机始终处于画面中央,会带着视角乱晃,在Gazebo中进行任何操作视角都无法固定。 观察Gazebo左侧World栏GUI选项,发现有一个track_visual项,这个是Gazebo中的跟随视角,跟踪目标是无人机iris,

【PX4-AutoPilot教程-TIPS】Gazebo仿真环境昏暗的解决办法即Ubuntu系统安装NVIDIA显卡驱动方法
Gazebo仿真环境昏暗的解决办法即Ubuntu系统安装NVIDIA显卡驱动方法 分析原因手动安装方法(推荐)自动安装方法检查是否安装成功Gazebo仿真环境前后对比 分析原因 具体原因为:大多数情况是因为显卡性能不足,Gazebo自动关闭了灯光和阴影的渲染。但是自己的电脑明明有独立显卡为什么会性能不足呢?原因是Ubuntu在安装的时候并不会为独立显卡配置驱动,而是默认使用CP

【PX4-AutoPilot教程-源码】移植PX4固件到自制NuttX操作系统飞控板的方法
移植PX4固件到自制NuttX操作系统飞控板的方法 找到使用相同(或型号相似)CPU类型的现有目标并进行复制飞控板的配置文件夹结构firmware.prototype文件default.px4board文件bootloader.px4board文件nuttx-config/bootloader/defconfig文件nuttx-config/nsh/defconfig文件nuttx-conf

PX4-Autopilot v1.11.1 Makefile 的一点解读
好久没关注 PX4 的更新进度,最近正好想重新搭一个仿真环境,就下载了最新的代码来看。 原本的下载地址 https://github.com/PX4/Firmware 已经更名为 https://github.com/PX4/PX4-Autopilot ,目前在浏览器里输入这两个链接都能打开。 代码中只有主目录中一个 Makefile ,而且文件长度比原本 v1.7.3 之前减少了很多,易读性

PX4-Autopilot下载与编译
文章目录 1 Git clone 代码2 下载子模块3 编译4 可能遇到的问题参考 1 Git clone 代码 Github Repository 链接:PX4-Autopilot 查看现有版本: 在终端用命令下载,-b表示branch git clone -b v1.14.0 https://github.com/PX4/PX4-Autopilot.git 注意:不要

特斯拉再因致命Autopilot车祸遭起诉 被索赔逾1.5万美元
【TechWeb】8月2日消息,据国外媒体报道,特斯拉再次因为致命Autopilot车祸被提起诉讼,并被要求支付逾1.5万美元的赔偿金。 今年3月,50岁的杰里米·贝伦·班纳(Jeremy Beren Banner)驾驶Model 3以每小时68英里(109公里)的速度与一辆牵引拖车相撞,导致其死亡。当时,他正在使用特斯拉的Autopilot高级驾驶辅助系统。 当地时周四,班纳的家人通过律师宣