本文主要是介绍物联网设计竞赛_5_Jetson Nano连接摄像头解决运行卡顿问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
我在命令行用camorama命令打开摄像头的时候发现摄像头非常流畅
当我用python的cv2库打开摄像头的时候发现摄像头显示图片异常卡顿,在网上多方寻觅无果后,经过偶然尝试,我发现了卡顿原来是视频帧率问题
淘宝官方资料看我的摄像头只有30fps, 但我不知道为什么cv2打开我的摄像头默认是3.0帧
以下为将摄像头修改为30帧并打开摄像头显示的代码:
import cv2
import time
def main():# 尝试打开摄像头cap = cv2.VideoCapture(0)if not cap.isOpened():print("打开摄像头失败")returnfss = cap.get(cv2.CAP_PROP_FPS)print(f"默认帧率为 {fss}")# 设置帧率fps = 30 # 我的摄像头只有3.0帧率和30帧率 final = cap.set(cv2.CAP_PROP_FPS, fps)print(f"{final}")fds = cap.get(cv2.CAP_PROP_FPS)print(f"设置帧率为 {fds}")# 创建窗口window_handle = cv2.namedWindow("D435", cv2.WINDOW_AUTOSIZE)# 计算一下实际帧率 start_time = time.time()frame_count = 0# 逐帧显示while cv2.getWindowProperty("D435", 0) >= 0:ret_val, img = cap.read()if ret_val:cv2.imshow("D435", img)frame_count += 1else:print("捕获帧失败")break# 5s一计算if time.time() - start_time >= 5:elapsed_time = time.time() - start_timeactual_fps = frame_count / elapsed_timeprint(f"实际帧率为: {actual_fps:.2f}")start_time = time.time() # 重置计时器frame_count = 0 # 重置帧计数keyCode = cv2.waitKey(30) & 0xFFif keyCode == 27: # ESC键退出break# 释放摄像头和销毁所有窗口cap.release()cv2.destroyAllWindows()if __name__ == "__main__":main()用上述代码30帧显示的效果就非常流畅了
说实话函数返回给我的结果也挺离奇的
# 设置帧率fps = 30 # 我的摄像头只有3.0帧率和30帧率 final = cap.set(cv2.CAP_PROP_FPS, fps)print(f"{final}")fds = cap.get(cv2.CAP_PROP_FPS)print(f"设置帧率为 {fds}")
这一块理应返回的是3.0 true 30但是却返还
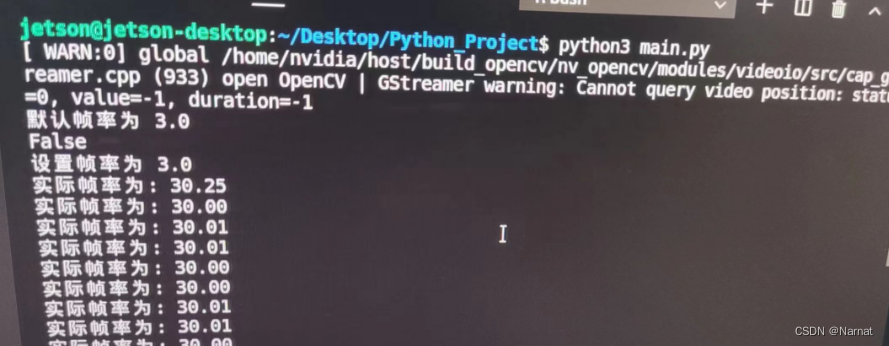
下方实际帧率是我通过5s内传递图片的数量 / 5得出来的实际帧率
也就是说吧我的摄像头其实设置帧率为30fps成功了,但是代码返还的结果是设置失败我真是服了,这可能是jetson和摄像头之间产生了奇妙BUG吧
默认情况下cv2打开我的摄像头确实是3.0帧, 但产品上都没有显示能3.0帧…
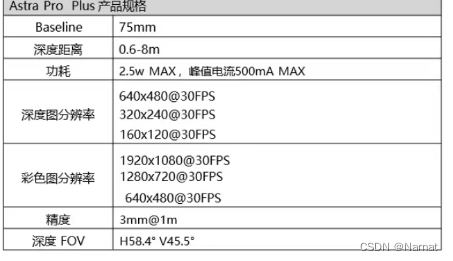
但确实默认帧率是3.0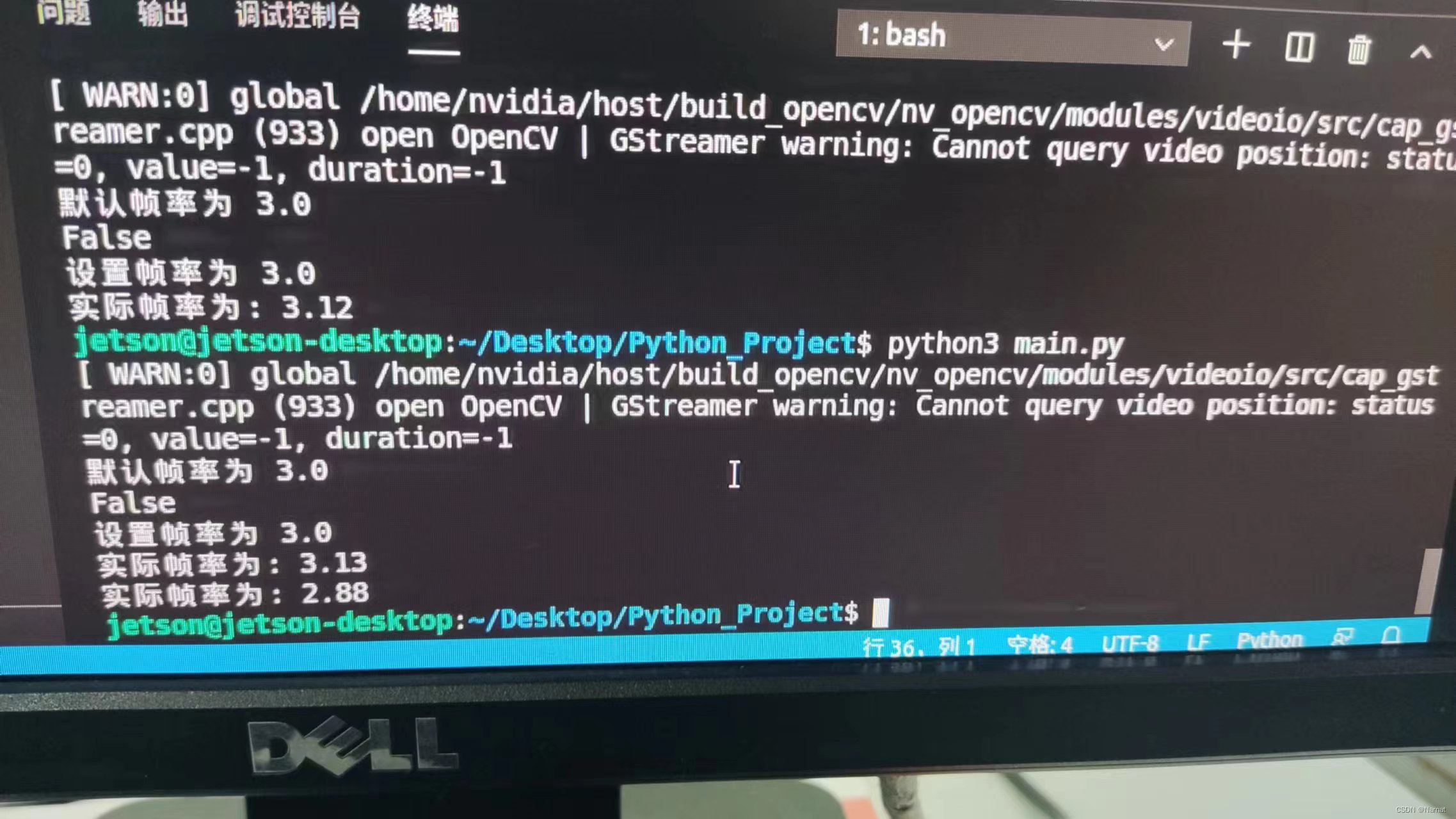
怎么说呢啥稀奇古怪的情况,都少不了我踩雷😭
这篇关于物联网设计竞赛_5_Jetson Nano连接摄像头解决运行卡顿问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







