本文主要是介绍基于EBAZ4205矿板的图像处理:04中值滤波算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于EBAZ4205矿板的图像处理:04中值滤波算法
先看效果
就是标准图像的效果,因为源图像就没有多少噪声。
我这里使用的是一个hdmi-in转usb3.0的采集卡,把板卡输出的HDMI视频画面采集成并通过usb摄像头直接在电脑上显示,节省了一个屏幕
算法讲解
中值滤波算法,简单地讲,就是对输入的滑动窗口数据进行排序,取中值作为该滑动窗口的输出。
值得注意的是,这里的排序不是用的冒泡排序 冒泡排序比较一个3x3滑窗的9个数据,要足足比较36次,哪怕不排序完,只要中值,也要比较 次,这太耗时了。
各位要明白我们用的是fpga,不是什么通用芯片,我们这里可以用并行化和面积换时间的思想,我们对一个滑动窗口的三行数据,每行应用一个排序器进行排序,在第一拍得到每个行的max,med,min,然后对所有的max,所有的med,所有的min再应用三组排序器,在第二拍取得max_min,med_med,和min_max,然后,对着三个数据再应用一个排序器,这样我们只要花三拍,就能得到中值。
项目简介
这个小项目我就是把整点原子的移植了过来,项目BD如下。
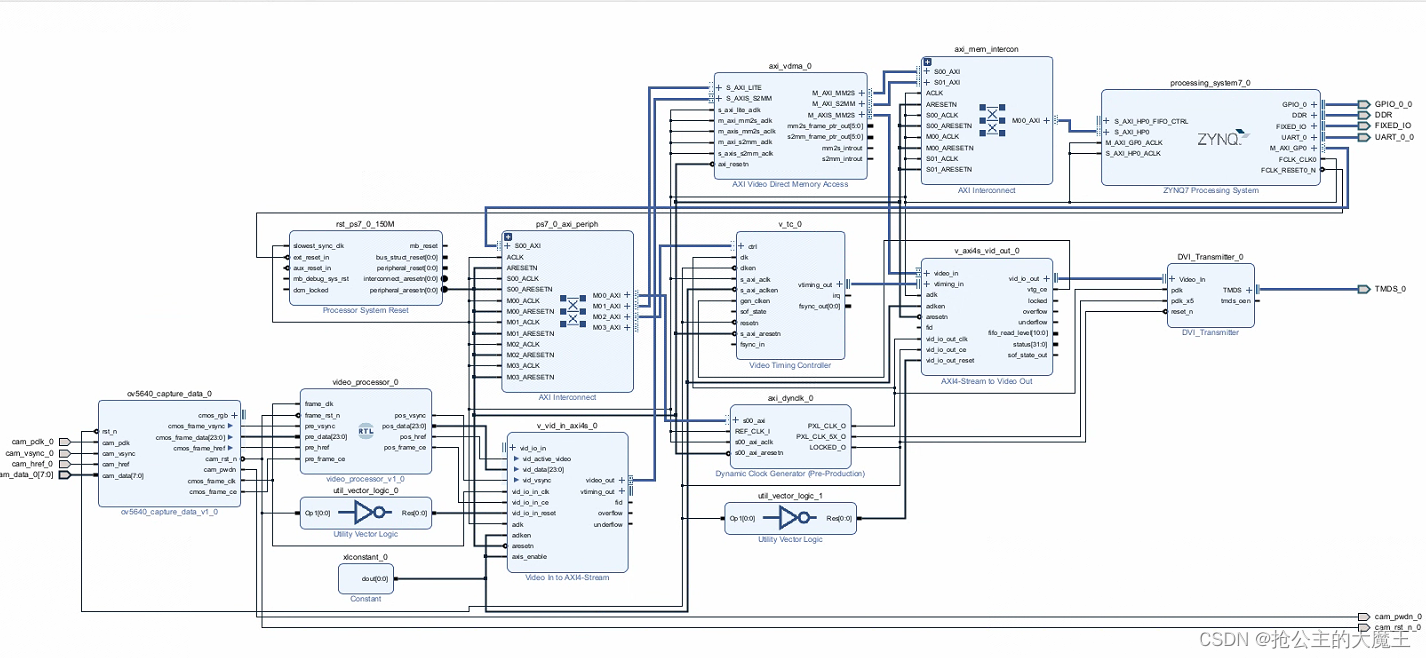
BD细节1
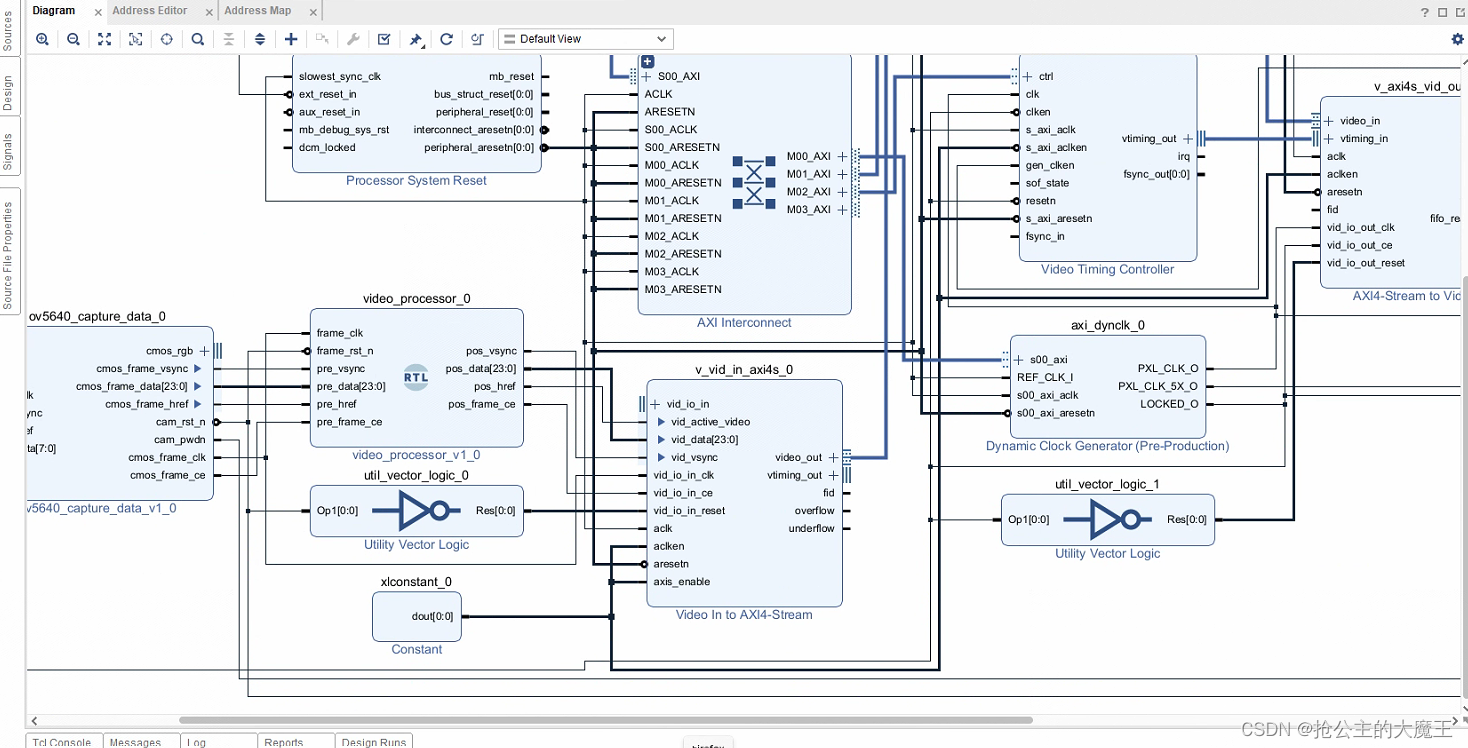
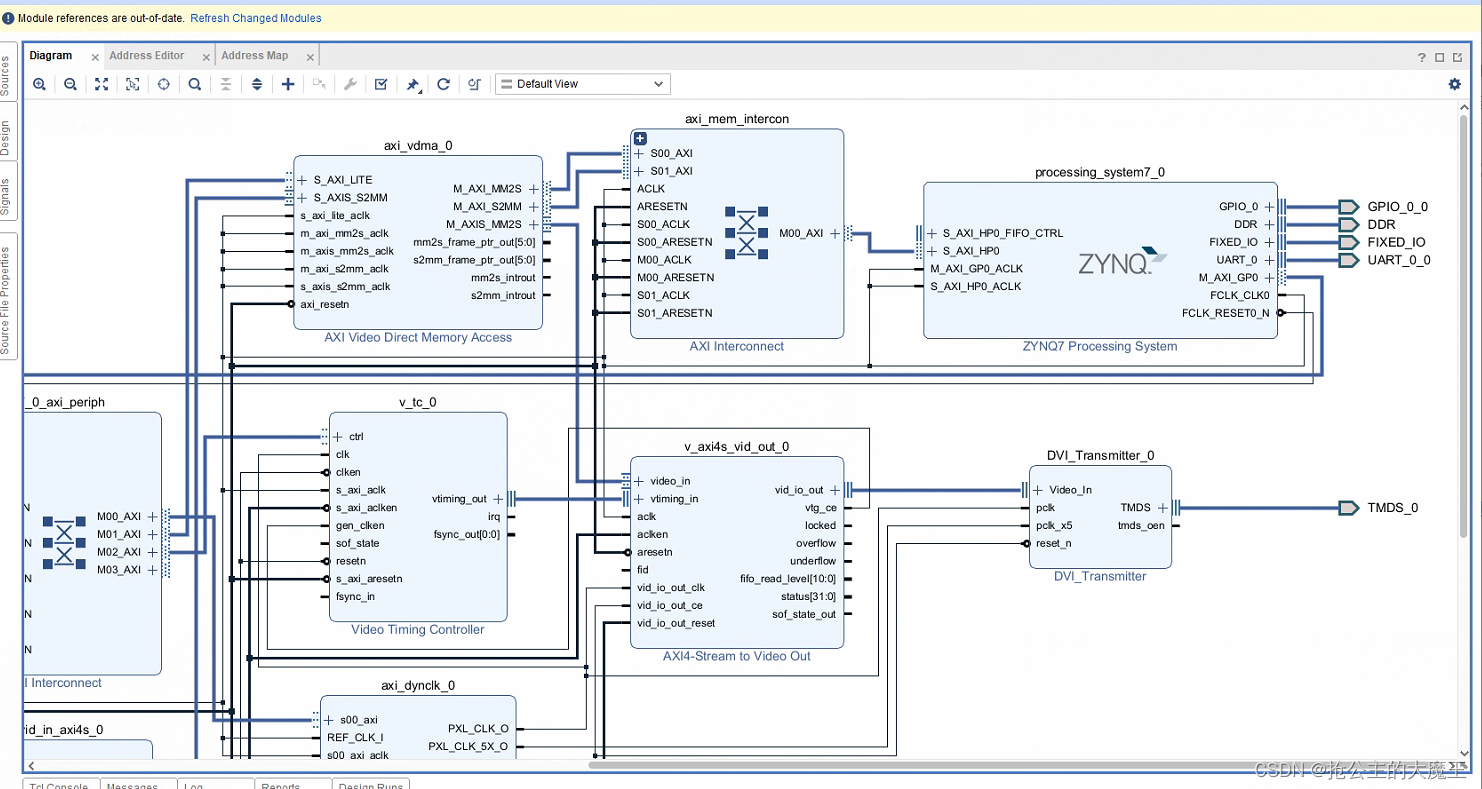
BD细节2
代码详解
我的rgb565转gray的模块是自己写的,不是用的正点原子的。下面也共享出来
`timescale 1ns / 1ps
module rgb2gray((* X_INTERFACE_IGNORE = "true" *) input cmos_frame_vsync,
(* X_INTERFACE_IGNORE = "true" *) input [23:0] cmos_frame_data,
(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_href,(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_clk,
(* X_INTERFACE_IGNORE = "true" *) input cmos_rstn,//同步复位
(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_ce,(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_vsync,
(* X_INTERFACE_IGNORE = "true" *) output [7:0] dataout_frame_data,
// (* X_INTERFACE_IGNORE = "true" *) output [23:0] dataout_frame_data,
(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_href,
(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_ce);// Y = 0.299R +0.587G + 0.114B// Y = (77 *R + 150*G + 29 *B)>>8reg [15:0] r_gray1;reg [15:0] g_gray1;reg [15:0] b_gray1;reg [15:0] y1;reg [7:0] y2;reg [2:0] dataout_frame_vsync_r;reg [2:0] dataout_frame_href_r;reg [2:0] dataout_frame_ce_r;always@(posedge cmos_frame_clk)beginif(!cmos_rstn)beginr_gray1 <= 8'h00;g_gray1 <= 8'h00;b_gray1 <= 8'h00;endelse beginr_gray1 <= cmos_frame_data[23:16] * 8'd77 ;g_gray1 <= cmos_frame_data[15:8] * 8'd150;b_gray1 <= cmos_frame_data[7:0] * 8'd29 ;endendalways@(posedge cmos_frame_clk)beginif(!cmos_rstn)beginy1 <= 16'h0000;endelse beginy1 <= r_gray1 + g_gray1 + b_gray1;endendalways@(posedge cmos_frame_clk)beginif(!cmos_rstn)beginy2 <= 8'h0000;endelse beginy2 <= y1[15:8];endendalways@(posedge cmos_frame_clk)beginif(!cmos_rstn)begindataout_frame_ce_r <= 3'b000;dataout_frame_vsync_r <= 3'b000;dataout_frame_href_r <= 3'b000;endelse begindataout_frame_ce_r <= {dataout_frame_ce_r[1:0] ,cmos_frame_ce};dataout_frame_vsync_r <= {dataout_frame_vsync_r[1:0] ,cmos_frame_vsync};dataout_frame_href_r <= {dataout_frame_href_r[1:0] ,cmos_frame_href};endend// assign dataout_frame_data = {y2,y2,y2};assign dataout_frame_data = y2;assign dataout_frame_ce = dataout_frame_ce_r[2];assign dataout_frame_vsync = dataout_frame_vsync_r[2];assign dataout_frame_href = dataout_frame_href_r[2];endmodule重点! 必看!
正点原子的模块是按照800X480或者更小的视频格式进行处理的,而我的是按照1280X800的视频格式进行处理的,所以正点原子的开源代码和免费教程里,例化的ram是1024X8bit大小的,这个尺寸实际上是不够的,如果你直接用他们的代码,就会出现下面的效果。
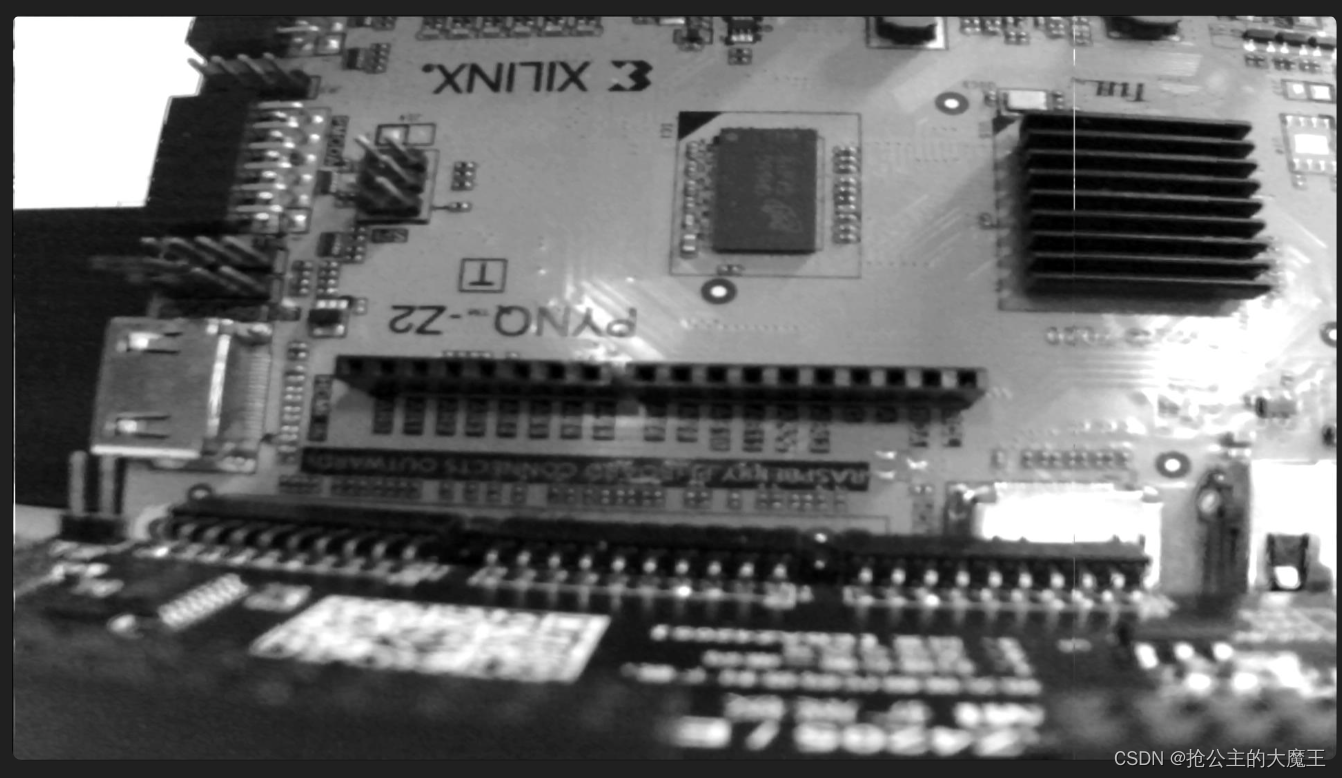
可以看到,usb摄像头显示的画面中间偏右处,有一个细条,实际上因为是这个中值滤波项目的是对视频流的行数据进行缓存,缓存两行数据加上三个实时数据,组成一个矩阵用于进行(非线性卷积)中值滤波运算。而因为正点原子的代码中例化的是1024X8bit大小的ram并且我的视频流是1280的宽度,所以超过了1024后的数据就没有被滤波,而是原始数据。
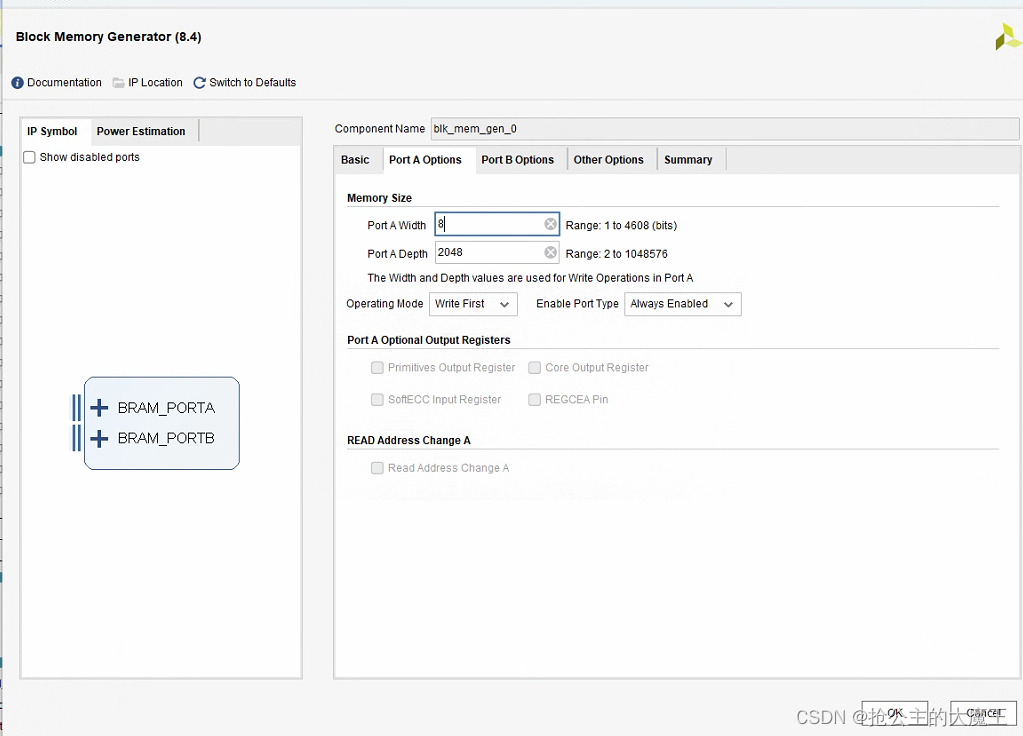
所以为了项目的正常运行,ram IP要如下修改。
这篇关于基于EBAZ4205矿板的图像处理:04中值滤波算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








