本文主要是介绍《控制系统实验与综合设计》自控第二次(含程序和题目),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
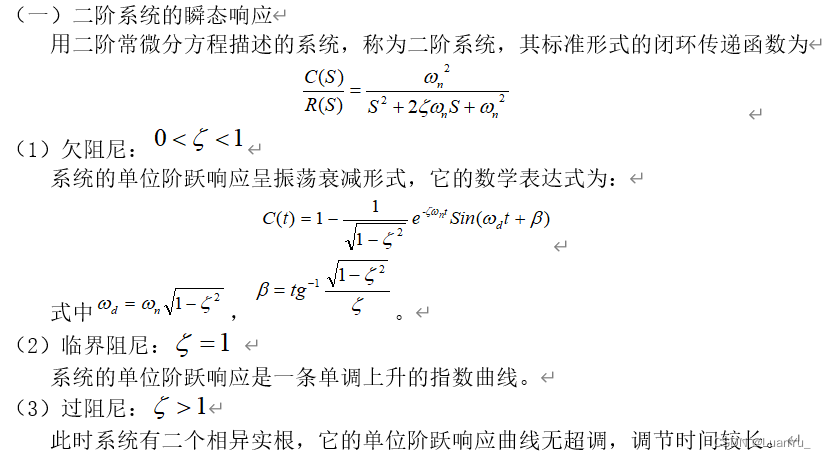
实验五 二阶系统的瞬态响应
一、实验完成任务
1、测试在不同阻尼比的条件下单位阶跃响应曲线,并进行其他动态性能指标测量。
2、通过调节开环增益得到相应K值,并进行其他动态性能指标测量。
3、在阻尼比一定时,测试角频率不同时的单位阶跃响应曲线,并进行其他动态性能指标测量。
4、将理论与实际比较并分析。
二、实验内容

三、原理和理论分析
3.1 原理
(二)二阶系统的典型结构
典型的二阶系统结构方框图和模拟电路图如1、如2所示。
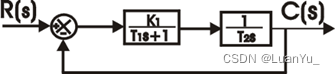
图1 二阶系统的方框图
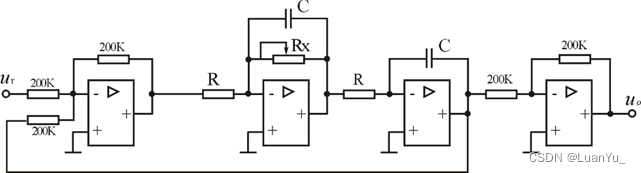
图2 二阶系统的模拟电路图
3.2 第一题理论分析
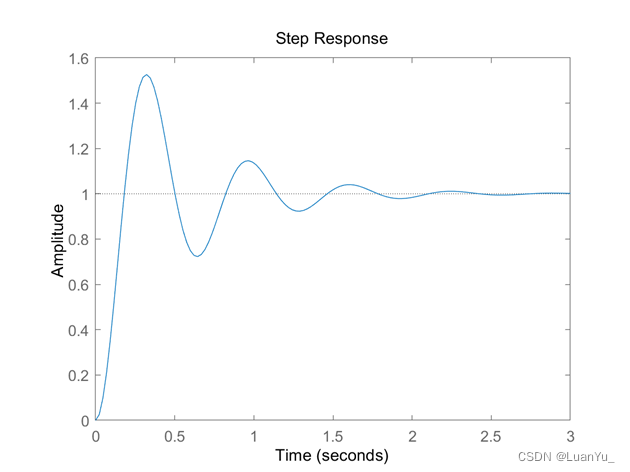
(一)MATLAB仿真曲线
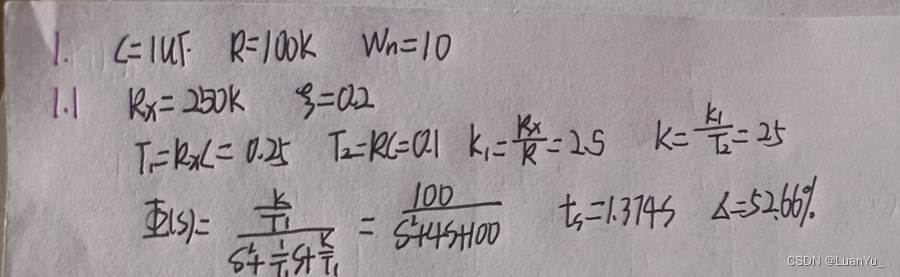
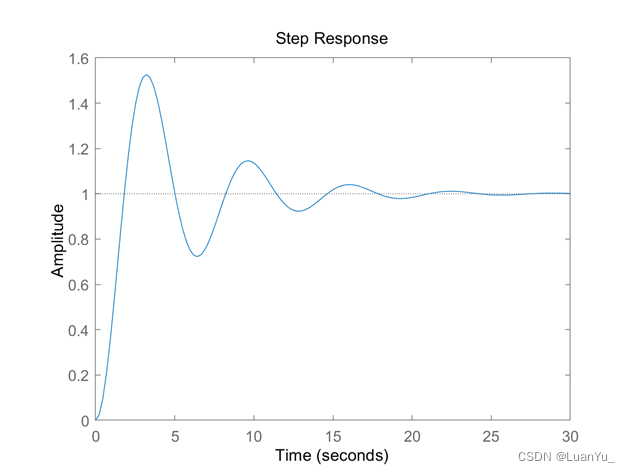
(1)欠阻尼:
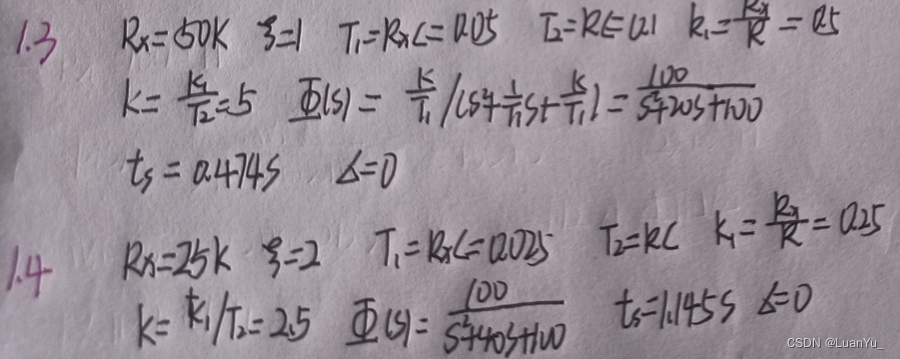
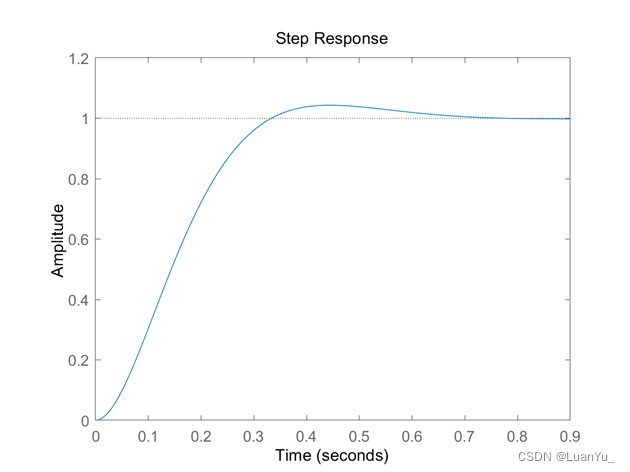
(2)临界阻尼:
(3)过阻尼:
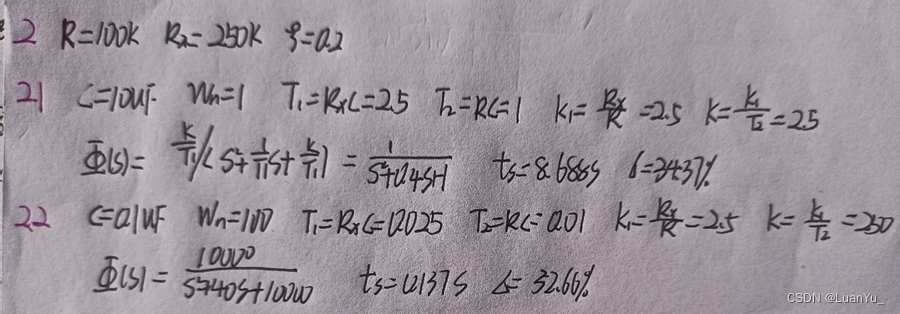
(二)动态性能指标计算
3.3 第二题理论分析
(一)MATLAB仿真曲线
(二)动态性能指标计算

3.4 第三题理论分析
(一)MATLAB仿真曲线
(1)
(2)
(二)动态性能指标计算
四、实验完成过程
4.1 第一题实验图像
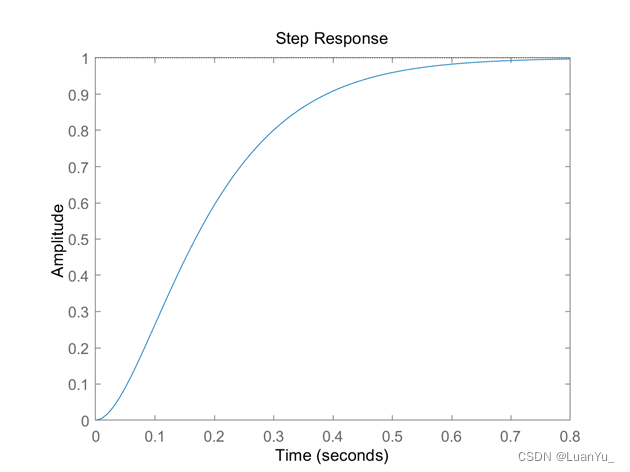
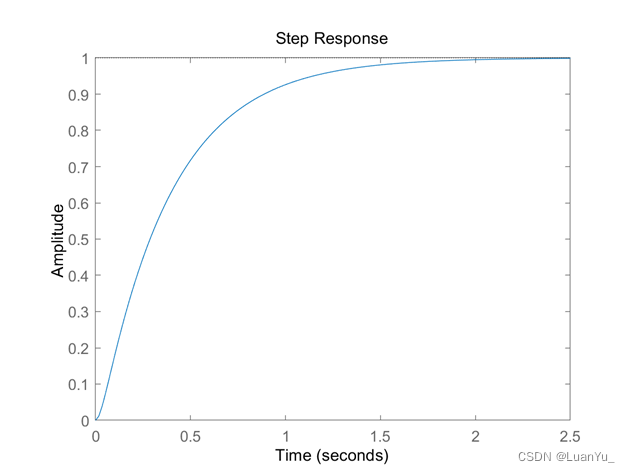
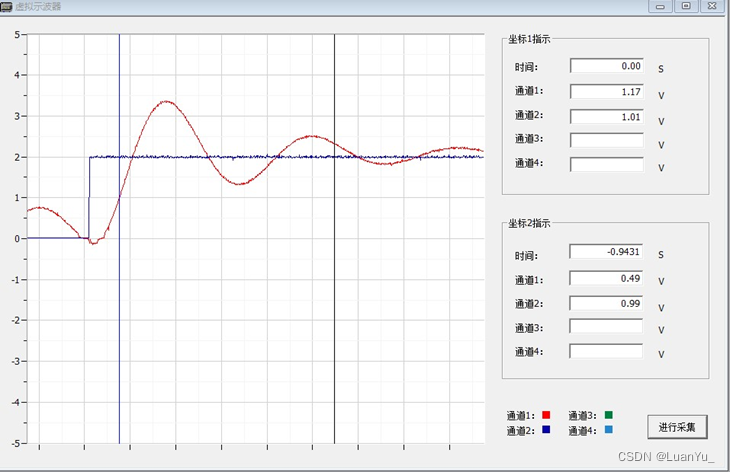
(1)欠阻尼:
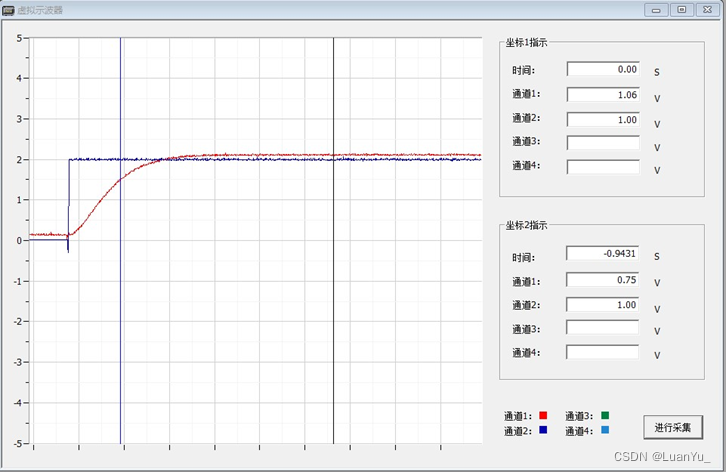
(2)临界阻尼:
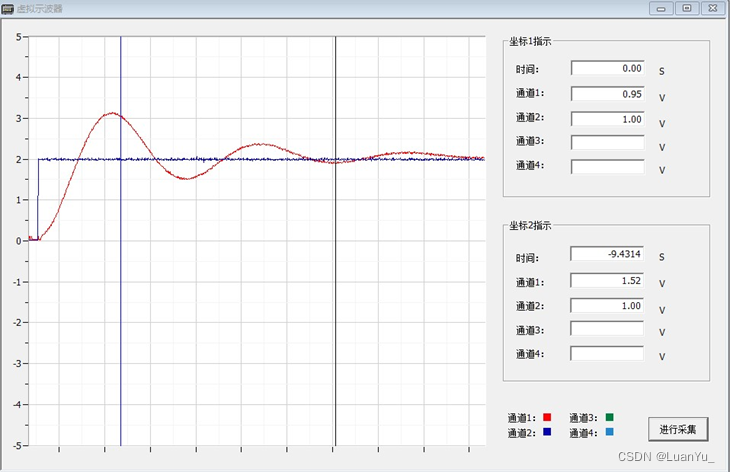
(3)过阻尼

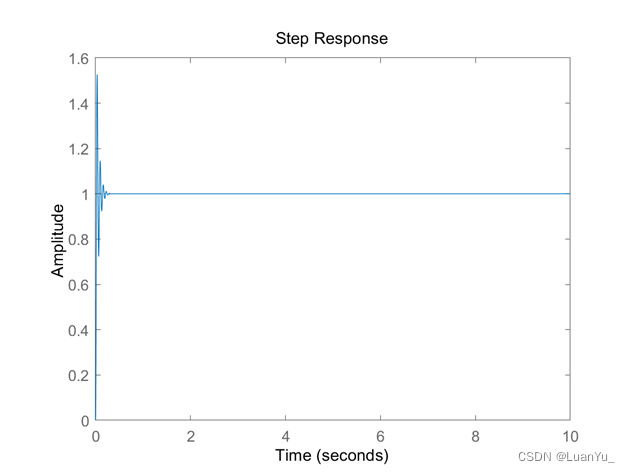
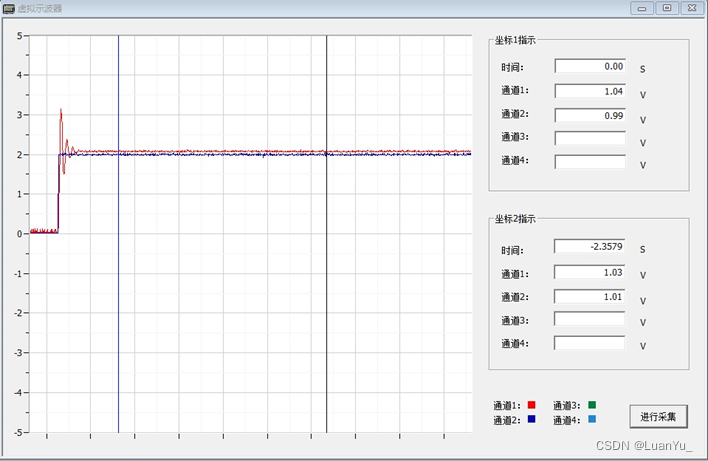
4.2 第二题实验图像

4.3 第三题实验图像
(1)
(2)
五、实验完成结果

六、理论与实验结果对比分析

(四)对比分析
通过理论值与实验值对比分析可知,理论值与实际值十分贴近,误差可以接受,说明实验成功!
(五)回答问题
(1)根据测得的系统单位阶跃响应曲线,分析开环增益K和时间常数T对系统的动态性能的影响。
答:开环增益K越大,系统越不稳定,系统阶跃响应的超调量越大;增加时间常数T可以增加系统阶跃响应的调节时间。
(2)如果阶跃输入信号的幅值过大,会在实验中产生什么后果?
答:若阶跃输入信号幅值过大,会使输出跃阶响应曲线的稳态值过大,如果系统有较大的超调量,则阶跃响应的幅值可能会超出范围,不能测得完整的响应曲线,实验测出的各种数据都会发生变化,使其精度降低,超出实验的误差,同时会使系统动态特性的非线性因素增大,使线性系统变成非线性系统;也有可能导致实验的失败,最后实验不能趋于稳定,实验结果出错。
(3)在电路模拟系统中,如何实现负反馈和单位负反馈?
答:负反馈指将系统的输出返回到输入端并与输入相减,进而影响系统功能的过程。单位负反馈:反馈建立在闭环系统上,所谓闭环系统,就是上位机控制下位机动作,下位机产生的误差通过闭环回路反馈给上位机,再由上位机处理,计算误差量,对下位机进行校正。
(4)为什么本实验中二阶系统对阶跃输入信号的稳态误差为零。
答:对于本实验二阶系统开环传函中还有一个积分环节,属于一型系统,一型系统可以对阶跃信号进行无差追踪,所以稳态误差为零。
实验六 典型环节和系统频率特性的测量
一、实验完成任务
1、惯性环节与振荡环节的频率特性测试。
2、用实验箱连线测试的方法获得相应的频率特性曲线。
3、根据频率特性曲线获得相应的传递函数。
4、利用MATLAB工具绘制惯性环节和二阶系统的Bode图。
二、实验内容
1、惯性环节(一阶系统)的频率特性测试;
2、振荡环节(二阶系统)频率特性测试;
3、由实验测得的频率特性曲线,求取相应的传递函数;
4、用软件仿真的方法,求取惯性环节和二阶系统的频率特性
三、原理和理论分析
3.1 原理
(一)系统的频率特性

(二)频率特性的测试方法
(1)用虚拟示波器测试
![]()
图1 用虚拟示波器测试系统(环节)的频率特性
(2)惯性环节
传递函数和电路图为
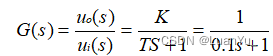
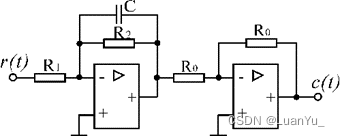
图2 惯性环节的电路图
(3)二阶系统
系统的传递函数为:

3.2 理论分析
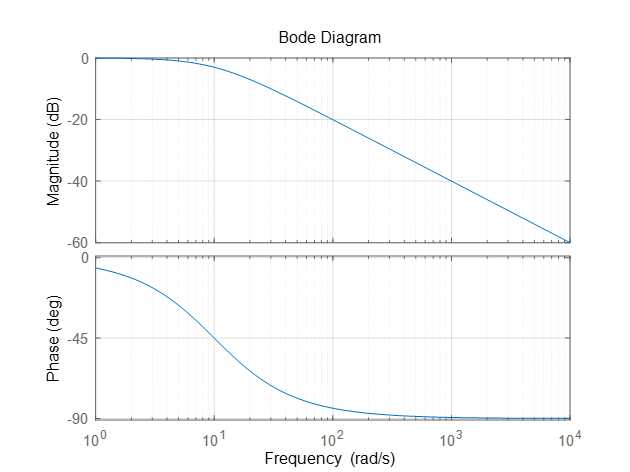
(一)惯性环节理论计算,电路图及对应传函如下图。

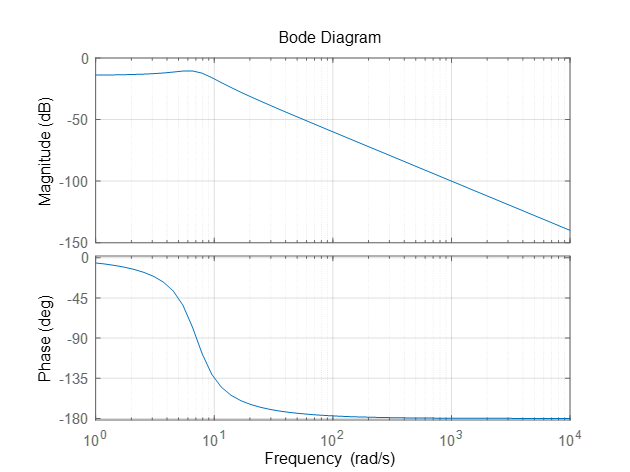
MATLAB仿真Bode图如下:
(二)二阶系统理论计算
(1)时,电路图及对应传函如下图。
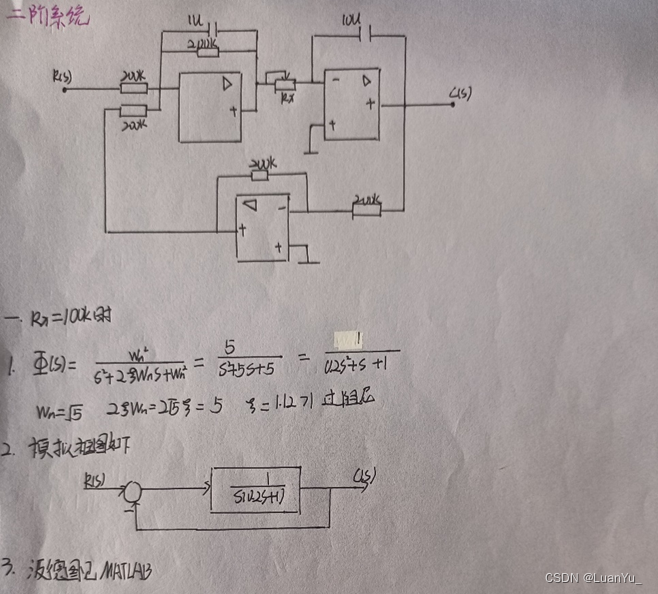
MATLAB仿真Bode图如下

(2),对应传函及曲线如下图。

MATLAB仿真Bode图如下:
四、实验完成过程
4.1 惯性环节实验幅频及相频图像

4.2 二阶系统 实验幅频及相频图像
实验幅频及相频图像
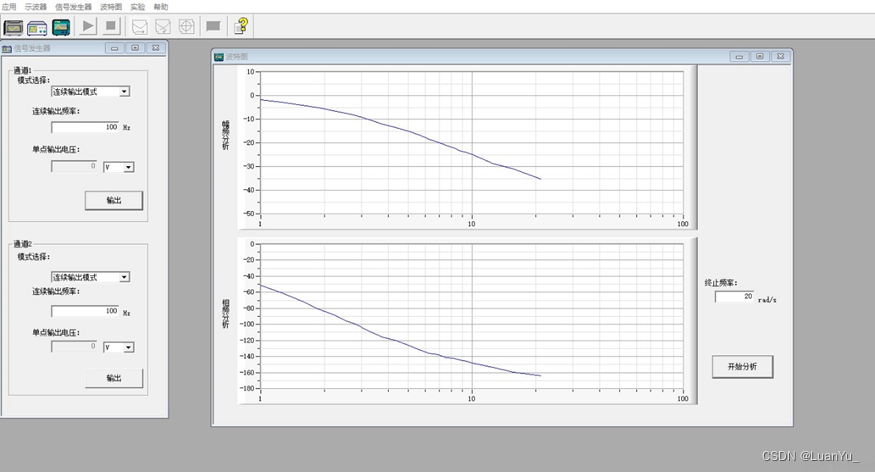
4.3 二阶系统 实验幅频及相频图像
实验幅频及相频图像

五、实验完成结果
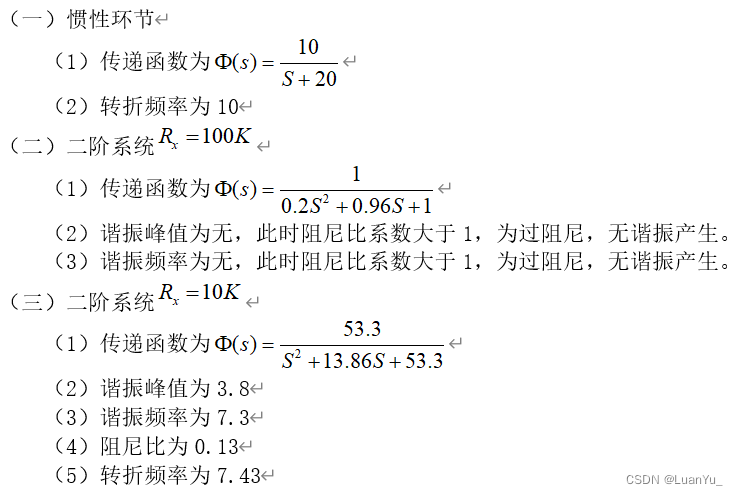
六、理论与实验结果对比分析
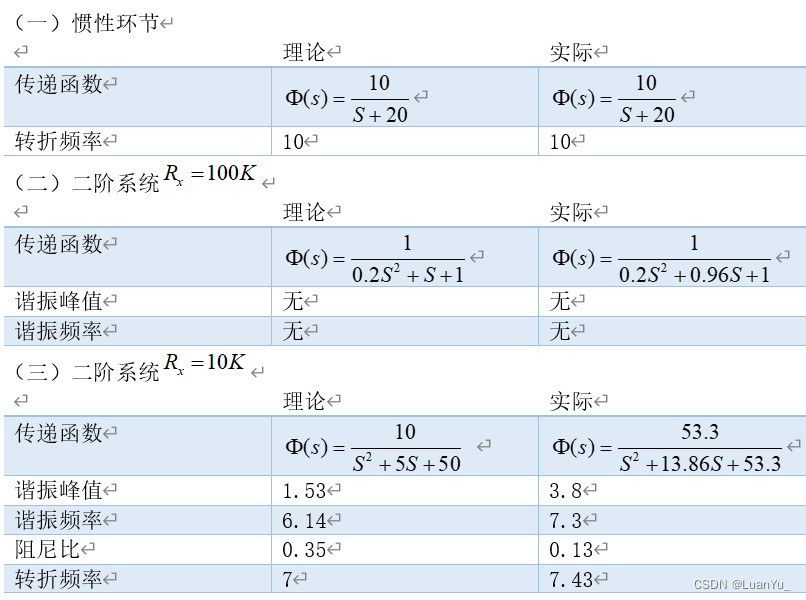
(四)比较分析
通过理论与实际的对比分析,二阶系统是存在一些误差的。对于二阶欠阻尼系统,其谐振频率与峰值均大于理论值,且阻尼比系数比理论上的少,可能是由于累计误差引起。
从上位机获取的图像中我们可以看出他的曲线并不是一段十分平滑的曲线,而是一小段一小段的,这是因为计算机控制系统的A/D和D/A过程导致的,但是仍能清晰看出理论与实际的曲线大致走向是一致的,实验也是正确的。
(五)回答问题
根据上位机测得的 Bode 图的幅频特性,就能确定系统(或环节)的相频特性,试问这在什么系统时才能实现?
答:这在最小相位系统中才能实现。
这篇关于《控制系统实验与综合设计》自控第二次(含程序和题目)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





