本文主要是介绍CSF(Cloth Simulation Filter)点云地面点滤波,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
CSF[Cloth Simulation Filter]点云地面点滤波
- 0.引言
- 1.布料模拟
- 2.修改布料模拟
- 3.布料滤波
- 4.CSF总体过程
0.引言
-
code
-
基本原理:原始点云被倒置过来,然后⼀块布从上⽅掉落到倒置的表⾯。通过分析布的节点与相应的LIDAR点之间的相互作⽤,可以确定布的最终形状,并将其⽤作将原始点分类为地⾯和⾮地⾯。

1.布料模拟
在计算图形学中,可以将⼀块布认为由具有质量和互连的粒⼦组成的⽹格,称为质量弹簧模型(mass spring model)。下图显⽰了mass spring model结构。⽹格节点上的粒⼦没有⼤⼩,但分配了恒定质量。

粒⼦在三维空间中的位置决定了布的位置和形状。在此模型中,粒⼦之间的互连被建模为“虚拟弹簧”,它连接两个粒⼦并遵守胡克定律。为了充分描述布的特性,已经定义了三种类型的弹簧:牵引弹簧、剪切弹簧、屈曲弹簧。
粒⼦的位置和速度取决于作⽤在粒⼦上的⼒。根据⽜顿的第⼆定律,位置和⼒之间的关系由等式
(1)确定:
m ∂ X ( t ) ∂ t 2 = F ext ( X , t ) + F int ( X , t ) m \frac{\partial X(t)}{\partial t^2}=F_{\text {ext }}(X, t)+F_{\text {int }}(X, t) m∂t2∂X(t)=Fext (X,t)+Fint (X,t)
其中 x 表⽰粒⼦在时间 t 上的位置; f e x t ( x , t ) f_{ext}(x,t) fext(x,t) 代表外⼒,由重⼒和碰撞⼒组成, F i n t ( x , t ) F_{int}(x,t) Fint(x,t)代表位置x和时间t处的粒⼦的内⼒(由粒⼦互相连接产⽣)。由于内部和外⼒随时间t的变化⽽变化,因此通常通过数值⽅法(例如,Euler⽅法)求解⽅程.
2.修改布料模拟
为了使布料模拟适应地⾯滤波,需要做以下修改:
- (1)将粒⼦的运动限制为沿垂直⽅向,因此可以通过⽐较粒⼦和地形的⾼度值来实现地⾯点云检测
- (2)当粒⼦到达地⾯时,设置粒⼦为不可移动,如果不可移动的粒⼦与地形的⾼度相当,就认为是地⾯
- (3)将作⽤在粒⼦上的⼒分解为2个⼒。⾸先考虑重⼒对粒⼦的作⽤,当在重⼒作⽤下,粒⼦到达地⾯时,此时将粒⼦变为不可移动状态,此时可以忽略碰撞⼒。其次根据内⼒改变粒⼦位置。
其过程如下图所⽰:
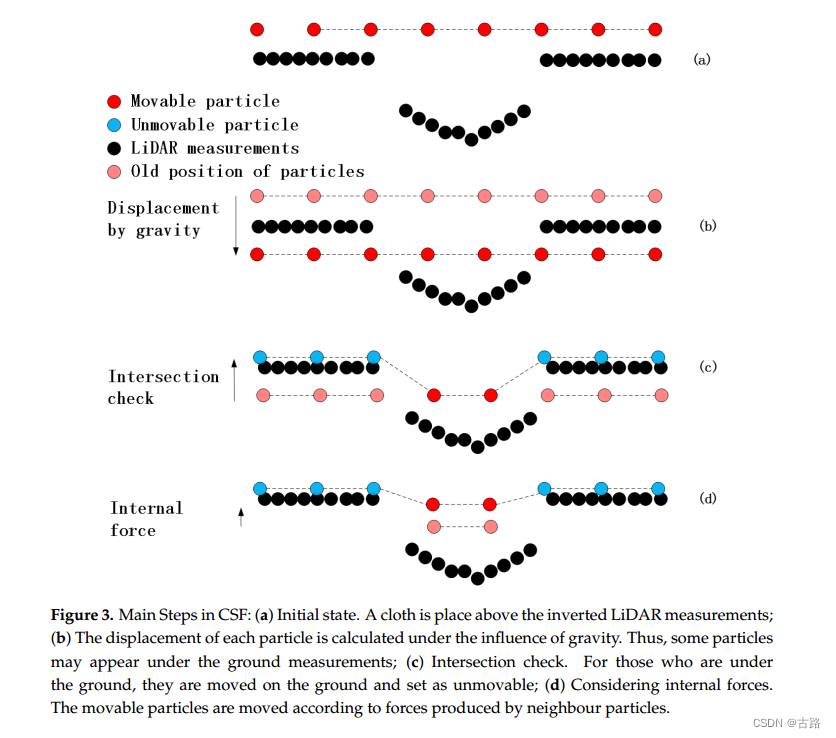
CSF中的主要步骤:
- (a)初始状态。⼀块布倒置放在的激光雷达点云上⽅;
- (b)在重⼒的影响下计算每个粒⼦的位移。因此,某些粒⼦可能会出现在地⾯下。
- (c)交叉检查。对于那些在地下的粒⼦,他们被移动在地⾯上并设置为⽆法移动的(蓝⾊粒⼦);
- (d)考虑内部⼒量。根据粒⼦之间的内⼒移动可移动的粒⼦(红⾊粒⼦)。
3.布料滤波
根据 2.对布料模拟的修改,布料滤波可以分为两个部分:
- ⾸先考虑外⼒(考虑重⼒忽略碰撞⼒):在外⼒中,我们仅从重⼒中计算每个粒⼦的位移,即内⼒等于零的求解⽅程:
X ( t + Δ t ) = 2 X ( t ) − X ( t − Δ t ) + G m Δ t 2 X(t+\Delta t)=2 X(t)-X(t-\Delta t)+\frac{G}{m} \Delta t^2 X(t+Δt)=2X(t)−X(t−Δt)+mGΔt2
- 其次,考虑内⼒部分:仅遍历每个spring(spring由每两个粒⼦组成),⽽⾮遍历每个粒⼦。对于每个spring,我们⽐较了构
成当前spring的两个粒⼦之间的⾼度差。因此,⼆维(2-D)问题被抽象为⼀维(1-D)问题,如下图所⽰:

当使⽤内⼒移动粒⼦的运动⽅向时,两个具有不同⾼度值的粒⼦将尝试移动到同⼀⽔平⾯。
如果两个连接的粒⼦都是可移动的,我们将它们以相反的⽅向移动。如果其中⼀个是不可移动的,那么另⼀个将被移动。否则,如果这两个粒⼦具有相同的⾼度值,则它们都不会移动。因此,每个粒⼦的位移(向量)可以通过以下公式计算:
d ⃗ = 1 2 b ( p i → − p 0 → ) ⋅ n ⃗ \vec{d}=\frac{1}{2} b\left(\overrightarrow{p_i}-\overrightarrow{p_0}\right) \cdot \vec{n} d=21b(pi−p0)⋅n
d ⃗ \vec{d} d 表示粒子位移向量, b b b :粒子可移动时等于 1 ,否则等于 0 , p 0 → , p i → 0, \overrightarrow{p_0}, \overrightarrow{p_i} 0,p0,pi 分别表示粒子与其近邻粒子的当前位置 (坐标) 向量, n ⃗ = ( 0 , 0 , 1 ) \vec{n}=(0,0,1) n=(0,0,1) 表示垂直方向的单位向量。
内力作用下的移动过程是一个迭代过程,用rigidness表示迭代次数。每次移动距离为之前距离的二分之一,设两个粒子原始距离为 V D \mathrm{VD} VD ,则rigidness=1,两个粒子之间的距离变为 1 2 V D \frac{1}{2} V D 21VD, rigidness=2,两个粒子之间的距离变为 1 4 V D \frac{1}{4} V D 41VD, rigidness = 3 =3 =3 ,两个粒子之间的距离变为 1 8 V D \frac{1}{8} V D 81VD ,其过程如下图:

4.CSF总体过程
⾸先,我们将布粒⼦和LIDAR点投射到同⼀⽔平平⾯,然后在此2D平⾯中找到每个布粒⼦的最近的激光点云(称为对应点,CP)。定义了⼀个相交⾼度值(IHV)以记录CP的⾼度差值(投影之前)。IHV表⽰粒⼦能到达的最低位置,即如果粒⼦达到由该值定义的最低位置,则不能再向前移动。
在每次迭代期间,我们将粒⼦的当前⾼度值(CHV)与IHV进⾏⽐较;如果CHV等于或低于IHV,则将粒⼦移回IHV的位置并使粒⼦⽆法移动.
在经过外⼒和内⼒计算之后获得了近似的真实地形,然后通过计算原始LIDAR点云和模拟粒⼦之间的距离。距离⼩于阈值HCC的LIDAR点被归类为地⾯点,⽽其余点为⾮地⾯点。
CSF具体过程
- 1.对点云进行异常点云(噪点)处理。
- 2.倒置原始的LIDAR点云。
- 3.初始化布料⽹格。根据⽤⼾定义的⽹格分辨率(GR)确定粒⼦数。布的初始位置通常设置在最⾼点上⽅。
- 4.将所有LIDAR点和⽹格粒⼦投影到⽔平⾯,并在该平⾯中找到每个⽹格粒⼦的CP,然后记录 IHV。
- 5.对于每个⽹格粒⼦,如果该粒⼦可移动,则计算受重⼒影响的位置,并将该布粒⼦的⾼度与IHV 进⾏⽐较。如果粒⼦的⾼度等于或⼩于IHV,则将该粒⼦放置在IHV的⾼度上,并将其设置为“⽆法移动”
- 6.对于每个⽹格粒⼦,计算受内⼒影响的每个粒⼦的位移
- 7.重复(5)-(6)。当所有粒⼦的最⼤⾼度变化(M_HV)⾜够⼩时,或者超过⽤⼾指定的最⼤迭代次数时,布料模拟过程将终⽌。
- 8.计算云到⽹格粒⼦和激光元点云之间的云距离。
- 9.分离地⾯点。对于每个LIDAR点云,如果与模拟粒⼦的距离⼩于HCC,则将该点归为地⾯点云,否则将其归为⾮地⾯点
这篇关于CSF(Cloth Simulation Filter)点云地面点滤波的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






