本文主要是介绍单极性PWM和双极性PWM,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
单极性与双极性PWM模式
从调制脉冲的极性看,PWM又可分为单极性与双极性控制模式两种。
单极性PWM模式
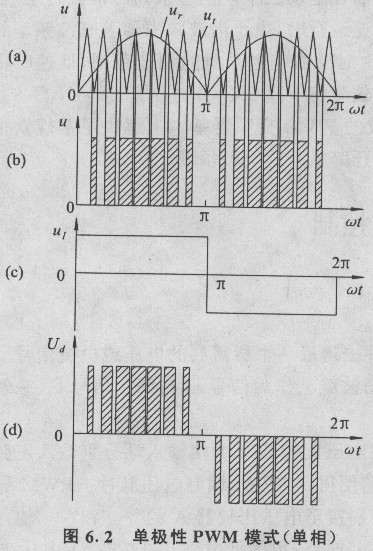
产生单极性PWM模式的基本原理如图6.2所示。首先由同极性的三角波载波信号ut。与调制信号ur,比较(图6.2(a)),产生单极性的PWM脉冲(图6.2(b));然后将单极性的PWM脉冲信号与图6.2(c)所示的倒相信号UI相乘,从而得到正负半波对称的PWM脉冲信号Ud,如图6.2(d)所示。
双极性PWM模式
双极性PWM控制模式采用的是正负交变的双极性三角载波ut与调制波ur,如图6.3所示,可通过ut与ur,的比较直接得到双极性的PWM脉冲,而不需要倒相电路。
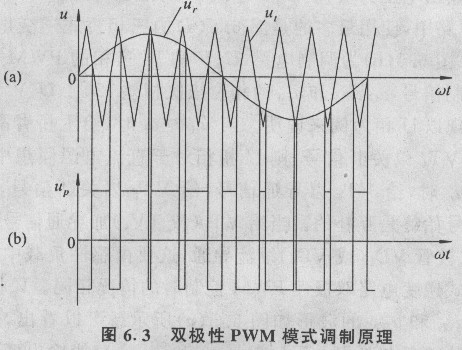
与单极性模式相比,双极性PWM模式控制电路和主电路比较简单,然而对比图6.2(d)和图6.3(b)可看出,单极性PWM模式要比双极性PWM模式输出电压中、高次谐波分量小得多,这是单极性模式的一个优点。
这篇关于单极性PWM和双极性PWM的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









