本文主要是介绍STM32F407实现傅里叶变换的三种方法【附源码】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、浅谈傅里叶变换(Fourier Transformation,FT)
1、傅里叶级数
想要了解傅里叶变换,就要先了解一下什么是傅里叶级数。

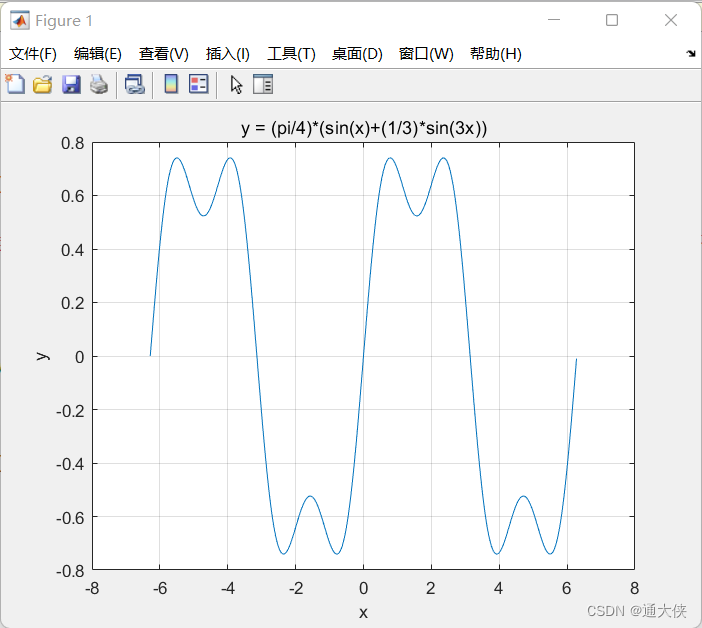

 如图所示,通过不断合成不同频率的正弦波(频率分量),合成后的波形会逐渐形成类似方波的图形。若叠加的正弦波足够多,那么可以认为最终得到的波形就是方波。
如图所示,通过不断合成不同频率的正弦波(频率分量),合成后的波形会逐渐形成类似方波的图形。若叠加的正弦波足够多,那么可以认为最终得到的波形就是方波。
换句话说,方波是由许许多多不同频率的正弦波组成的。
不仅如此,我们能见到的,能听到的,能想到的所有波,不管高矮胖瘦,也不论是否奇形怪状,都可以分解为不同频率的正弦波。
可以从三个维度去观察“波”的特性,他们分别是幅度、频域和时域。


在频域中,频率是从0Hz开始的。0Hz有什么意义呢?
在信号处理中,0Hz的正弦波分量实际上对应了信号的直流(DC)分量。正弦波在0Hz时并不是一个振荡的信号,而是一个恒定的值,即信号的均值或直流偏置。
对于任何实数信号,在频率0处(或称为DC分量)通常是非零的,除非信号的平均值为0。这个DC分量表示了信号中恒定的部分,即不随时间变化的部分。
2、傅里叶变换


不难看出,傅里叶级数处理的是周期的,连续的信号,频域上表现为离散的非周期函数。
而傅里叶变换处理的是非周期的,连续的信号,频域上表现为连续的非周期函数。
可以把傅里叶变换看做是处理周期无限大信号的一种方法。
3、离散傅里叶变换(Discrete Fourier Transform,DFT)
我们都知道,计算机采集的信号都是离散的,不可能是连续的。
这时候我们就需要用到离散傅里叶变换——DFT。
4、快速傅里叶变换(Fast Fourier Transform,FFT)
通俗点来讲,快速傅里叶变换就是高效版的离散傅里叶变换。
二、软件实现
软件有三种方法实现傅里叶变换。
在此之前,要先确定采样点数N和采样频率Fs。
详情请看
【电赛2020E题】从硬件到软件![]() https://mp.csdn.net/mp_blog/creation/editor/137835864里面有介绍FS和N。
https://mp.csdn.net/mp_blog/creation/editor/137835864里面有介绍FS和N。
方法一:STM32cubeMX 调用 DSP库
STM32CubeMX关于添加DSP库的使用![]() https://blog.csdn.net/WandZ123/article/details/125593908
https://blog.csdn.net/WandZ123/article/details/125593908
方法二:调用FFT.c和FFT.h文件
方法三:巧用DFT
以电赛2020E题为例,题中要求对1KHz的原信号取五次谐波,那么我们只需关心1KHz到5KHz的的傅里叶变换。即仅需计算1KHz、2KHz...5KHz的点即可(代码中1KHz对应100个点)。
三、原码
这里只展示main.c,需要完整文件请看文章最后。
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "arm_math.h"
#include "fft.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define N 1024
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */float FFT_INPUT[N];
float FFT_OUTPUT[N];
float FFT_1024POINT[2*N];
complex FFT_POINT[N];
_Bool Flag=0;
arm_cfft_radix4_instance_f32 scfft;
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
float abscomplex(complex *in)
{float out;out=in->real*in->real+in->imag*in->imag;return sqrt(out);
}
void DSP_FFTTC(float* IN)//IN是指主函数的FFT_INPUT[i]
{u32 i;for(i=0;i<N;i++){FFT_1024POINT[2*i]=*(IN+i);//存入实部,存入该数组偶数位置FFT_1024POINT[2*i+1]=0;//虚部置零,存入该数组奇数位置}arm_cfft_radix4_init_f32(&scfft,N,0,1);//初始化FFT结构体scfftarm_cfft_radix4_f32(&scfft,FFT_1024POINT);//进行FFT运算arm_cmplx_mag_f32(FFT_1024POINT,FFT_OUTPUT,N);//计算FFT的幅度printf("用DSP库的FFT\n");for(i=0;i<N/2;i++){if(i==0)//在FFT的结果中,索引为0的元素对应的是直流分量,即频率为0的分量{FFT_OUTPUT[i]=FFT_OUTPUT[i]/N;//对于索引为0的元素,对应直流分量,需要除以N进行修正}else{FFT_OUTPUT[i]=FFT_OUTPUT[i]*2/N;//对于其他元素,乘以2并除以N进行修正}printf("第%d个FFT:%.2f\n",i,FFT_OUTPUT[i]);//测试}
}
void L_FFT(float* IN)
{u32 i;for(i=0;i<N;i++){FFT_POINT[i].real=*(IN+i);FFT_POINT[i].imag=*(IN+i);/*fft.h中定义了结构体
typedef struct complex //复数类型
{float real; //实部float imag; //虚部
}complex;*/}fft(N,FFT_POINT);//傅里叶变换函数c_abs(FFT_POINT,FFT_OUTPUT,N);//求所有复数的模printf("普通的FFT\n");for(i=0;i<N/2;i++){/*详情注释见DSP库FFT*/if(i==0){FFT_OUTPUT[i]=FFT_OUTPUT[i]/N;}else{FFT_OUTPUT[i]=FFT_OUTPUT[i]*2/N;}printf("第%d个FFT:%.2f\n",i,FFT_OUTPUT[i]);//测试}
}void DFT(float* IN)
{u32 i,k;complex y={.real=0,.imag=0};printf("DFT\n");for(k=0;k<6;k++){for(i=0;i<N;i++){y.real+=*(IN+i)*cos(-2*100*PI*i*k/N);y.imag+=*(IN+i)*sin(-2*100*PI*i*k/N);}y.real=2*y.real/N;y.imag=2*y.imag/N;printf("第%d个点的值为%.2f\n",k,abscomplex(&y));}
}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */u16 i;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_ADC1_Init();MX_USART1_UART_Init();MX_TIM2_Init();MX_TIM3_Init();/* USER CODE BEGIN 2 */printf("开始\n");HAL_TIM_Base_Start_IT(&htim2);HAL_TIM_Base_Start(&htim3);HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);//PA6输出PWM/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){if(Flag){HAL_TIM_Base_Stop(&htim2);for(i=0;i<1024;i++){FFT_INPUT[i]=FFT_INPUT[i]*3.3f/4096;//除以4096是因为单片机采到的值经过转换后数据寄存器最高位为2的12次方,正好是4096,乘3.3v是为了转化为电压printf("ADC_VALUE:%.2f\n",FFT_INPUT[i]);}DSP_FFTTC(FFT_INPUT);L_FFT(FFT_INPUT);DFT(FFT_INPUT);HAL_Delay(1000);Flag=0;HAL_TIM_Base_Start(&htim2);}/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 4;RCC_OscInitStruct.PLL.PLLN = 168;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = 4;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{static u16 counter=0;if(htim==&htim2){if(!Flag){HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_15);//翻转PB15 用示波器测量以判断定时器频率FFT_INPUT[counter++]=get_adcvalue();if(counter==1024){counter=0;Flag=1;}}}
}/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */链接:https://pan.baidu.com/s/1DyjH0DaRx3qYEF7I_QdbpA?pwd=hk0x
提取码:hk0x
参考链接
通俗易懂的理解傅里叶变换(一)[收藏]
这篇关于STM32F407实现傅里叶变换的三种方法【附源码】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






