本文主要是介绍Pytoch实现姿势识别模型,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
OpenPose 介绍
姿势识别模型(OpenPose)指的是识别图片中的人物,并且对人物的各个部位进行识别,例如头部、肩膀、肘部,并进行连线最终生成一个线条图。
OpenPose 处理流程分为以下 3 步
- 预处理,图片调整为 368 * 368,颜色归一化
- 输入 OpenPose 的神经网络,网络输出两个数组,第一个是 193838(分类数 * 高度 * 宽度)代表 19 个分类,第二个是 PAFs 的分类 (38 * 368 * 368),19 个分类的X、Y 向量坐标,共计 38 个通道,数组中保存的值是分类的概率。
- 将身体部位输出结果按照每个部位形成一个点,根据 PAFs 中的信息对链接进行计算,并将图像尺寸恢复为原有图像大小
数据准备(数据集以及数据加载)
对于 OpenPose 模型,在数据准备中,有一个特别的步骤,要通过掩码方式将训练数据集和验证数据集中,对于那些没有提供标注信息的人物,要把任务涂黑,否则会对模型学习有很大影响。在训练过程中,损失函数会忽略这些被掩码覆盖(涂黑)的数据。
# 导入软件包
import json
import os
import os.path as osp
import numpy as np
import cv2
from PIL import Image
from matplotlib import cm
import matplotlib.pyplot as plt
%matplotlib inlineimport torch.utils.data as data
创建图像数据、标注数据
def make_datapath_list(rootpath):"""创建学习、验证的图像数据、标注数据、掩码数据的文件路径列表。"""#读取标注数据的JSON文件json_path = osp.join(rootpath, 'COCO.json')with open(json_path) as data_file:data_this = json.load(data_file)data_json = data_this['root']num_samples = len(data_json)train_indexes = []val_indexes = []for count in range(num_samples):if data_json[count]['isValidation'] != 0.:val_indexes.append(count)else:train_indexes.append(count)#保存图像数据的文件路径train_img_list = list()val_img_list = list()for idx in train_indexes:img_path = os.path.join(rootpath, data_json[idx]['img_paths'])train_img_list.append(img_path)for idx in val_indexes:img_path = os.path.join(rootpath, data_json[idx]['img_paths'])val_img_list.append(img_path)#保存掩码数据的文件路径train_mask_list = []val_mask_list = []for idx in train_indexes:img_idx = data_json[idx]['img_paths'][-16:-4]anno_path = "./data/mask/train2014/mask_COCO_tarin2014_" + img_idx+'.jpg'train_mask_list.append(anno_path)for idx in val_indexes:img_idx = data_json[idx]['img_paths'][-16:-4]anno_path = "./data/mask/val2014/mask_COCO_val2014_" + img_idx+'.jpg'val_mask_list.append(anno_path)#保存标注数据train_meta_list = list()val_meta_list = list()for idx in train_indexes:train_meta_list.append(data_json[idx])for idx in val_indexes:val_meta_list.append(data_json[idx])return train_img_list, train_mask_list, val_img_list, val_mask_list, train_meta_list, val_meta_list#确认执行结果(实际执行时间大约为10秒)
train_img_list, train_mask_list, val_img_list, val_mask_list, train_meta_list, val_meta_list = make_datapath_list(rootpath="./data/")val_meta_list[24]index = 24# 画像
img = cv2.imread(val_img_list[index])
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
plt.imshow(img)
plt.show()# 掩码
mask_miss = cv2.imread(val_mask_list[index])
mask_miss = cv2.cvtColor(mask_miss, cv2.COLOR_BGR2RGB)
plt.imshow(mask_miss)
plt.show()# 合成
blend_img = cv2.addWeighted(img, 0.4, mask_miss, 0.6, 0)
plt.imshow(blend_img)
plt.show()
# 导入数据处理类和数据增强类
from utils.data_augumentation import Compose, get_anno, add_neck, aug_scale, aug_rotate, aug_croppad, aug_flip, remove_illegal_joint, Normalize_Tensor, no_Normalize_Tensorclass DataTransform():"""图像、蒙版和注释的预处理类。它在学习和推理过程中表现不同。数据增强是在学习过程中进行的。"""def __init__(self):self.data_transform = {'train': Compose([get_anno(), # 将 JSON 中的注释存储到字典中add_neck(), # 更改注释数据的顺序并添加更多颈部注释数据aug_scale(), # 缩放aug_rotate(), # 旋转aug_croppad(), # 裁剪aug_flip(), # 水平翻转remove_illegal_joint(), # 删除图像中突出的注释no_Normalize_Tensor() ]),'val': Compose([# 本书省略验证])}def __call__(self, phase, meta_data, img, mask_miss):"""Parameters----------phase : 'train' or 'val'指定预处理模式。"""meta_data, img, mask_miss = self.data_transform[phase](meta_data, img, mask_miss)return meta_data, img, mask_miss# 动作确认
# 图像读取
index = 24
img = cv2.imread(val_img_list[index])
mask_miss = cv2.imread(val_mask_list[index])
meat_data = val_meta_list[index]#图像预处理
transform = DataTransform()
meta_data, img, mask_miss = transform("train", meat_data, img, mask_miss)# 画像表示
img = img.numpy().transpose((1, 2, 0))
plt.imshow(img)
plt.show()# Mask显示
mask_miss = mask_miss.numpy().transpose((1, 2, 0))
plt.imshow(mask_miss)
plt.show()# 在合成RGB后
img = Image.fromarray(np.uint8(img*255))
img = np.asarray(img.convert('RGB'))
mask_miss = Image.fromarray(np.uint8((mask_miss)))
mask_miss = np.asarray(mask_miss.convert('RGB'))
blend_img = cv2.addWeighted(img, 0.4, mask_miss, 0.6, 0)
plt.imshow(blend_img)
plt.show()from utils.dataloader import get_ground_truth# 图片加载
index = 24
img = cv2.imread(val_img_list[index])
mask_miss = cv2.imread(val_mask_list[index])
meat_data = val_meta_list[index]# 图像预处理
meta_data, img, mask_miss = transform("train", meat_data, img, mask_miss)img = img.numpy().transpose((1, 2, 0))
mask_miss = mask_miss.numpy().transpose((1, 2, 0))# OpenPose注释数据生成
heat_mask, heatmaps, paf_mask, pafs = get_ground_truth(meta_data, mask_miss)# 画像表示
plt.imshow(img)
plt.show()
# 检查左肘部的热图# 原始图像
img = Image.fromarray(np.uint8(img*255))
img = np.asarray(img.convert('RGB'))# 左肘
heat_map = heatmaps[:, :, 6] # 6是左肘
heat_map = Image.fromarray(np.uint8(cm.jet(heat_map)*255))
heat_map = np.asarray(heat_map.convert('RGB'))
heat_map = cv2.resize(heat_map, (img.shape[1], img.shape[0]), interpolation=cv2.INTER_CUBIC)
# 注意:热图图像尺寸为1/8,因此请放大。# 合成与显示
blend_img = cv2.addWeighted(img, 0.5, heat_map, 0.5, 0)
plt.imshow(blend_img)
plt.show()```
```
# 左手腕
heat_map = heatmaps[:, :, 7] # 7是左手腕
heat_map = Image.fromarray(np.uint8(cm.jet(heat_map)*255))
heat_map = np.asarray(heat_map.convert('RGB'))
heat_map = cv2.resize(heat_map, (img.shape[1], img.shape[0]), interpolation=cv2.INTER_CUBIC)# 合成与显示
blend_img = cv2.addWeighted(img, 0.5, heat_map, 0.5, 0)
plt.imshow(blend_img)
plt.show()```
```
# 确认 PAF 到左肘和左手腕
paf = pafs[:, :, 24] # 24连接左肘和左手腕paf = Image.fromarray(np.uint8((paf)*255))
paf = np.asarray(paf.convert('RGB'))
paf = cv2.resize(paf, (img.shape[1], img.shape[0]), interpolation=cv2.INTER_CUBIC)# 合成与显示
blend_img = cv2.addWeighted(img, 0.3, paf, 0.7, 0)
plt.imshow(blend_img)
plt.show()```
```
# 只显示PAF
paf = pafs[:, :, 24] #24连接左肘和左手腕
paf = Image.fromarray(np.uint8((paf)*255))
paf = np.asarray(paf.convert('RGB'))
paf = cv2.resize(paf, (img.shape[1], img.shape[0]), interpolation=cv2.INTER_CUBIC)
plt.imshow(paf)```
创建 dataset
```
from utils.dataloader import get_ground_truthclass COCOkeypointsDataset(data.Dataset):"""创建 MSCOCO 的 Cocokeypoints 数据集的类。继承PyTorch的Dataset类。Attributes----------img_list : 列表用于保存图像路径列表anno_list : 列表用于保存标注数据路径列表phase : 'train' or 'test'指定是学习还是训练。transform : object预处理类的实例"""def __init__(self, img_list, mask_list, meta_list, phase, transform):self.img_list = img_listself.mask_list = mask_listself.meta_list = meta_listself.phase = phaseself.transform = transformdef __len__(self):'''返回图像的张数'''return len(self.img_list)def __getitem__(self, index):img, heatmaps, heat_mask, pafs, paf_mask = self.pull_item(index)return img, heatmaps, heat_mask, pafs, paf_maskdef pull_item(self, index):'''获取图像的张量形式的数据、标注、掩码'''#1.读取图像数据image_file_path = self.img_list[index]img = cv2.imread(image_file_path) #[高度][宽度][颜色BGR]#2.读取掩码数据和标注数据mask_miss = cv2.imread(self.mask_list[index])meat_data = self.meta_list[index]#3.图像的预处理meta_data, img, mask_miss = self.transform(self.phase, meat_data, img, mask_miss)#4.获取正确答案标注数据mask_miss_numpy = mask_miss.numpy().transpose((1, 2, 0))heat_mask, heatmaps, paf_mask, pafs = get_ground_truth(meta_data, mask_miss_numpy)#5.掩码数据是RGB格式的(1,1,1)或(0,0,0),因此对其进行降维处理#掩码数据在被遮盖的部分的值为0,其他部分的值为1heat_mask = heat_mask[:, :, :, 0]paf_mask = paf_mask[:, :, :, 0]#6.由于通道在末尾,因此对顺序进行调整# 例:paf_mask:torch.Size([46, 46, 38])# → torch.Size([38, 46, 46])paf_mask = paf_mask.permute(2, 0, 1)heat_mask = heat_mask.permute(2, 0, 1)pafs = pafs.permute(2, 0, 1)heatmaps = heatmaps.permute(2, 0, 1)return img, heatmaps, heat_mask, pafs, paf_mask```
```
# 确认执行结果
train_dataset = COCOkeypointsDataset(val_img_list, val_mask_list, val_meta_list, phase="train", transform=DataTransform())
val_dataset = COCOkeypointsDataset(val_img_list, val_mask_list, val_meta_list, phase="val", transform=DataTransform())# #读取数据的示例
item = train_dataset.__getitem__(0)
print(item[0].shape) # img
print(item[1].shape) # heatmaps,
print(item[2].shape) # heat_mask
print(item[3].shape) # pafs
print(item[4].shape) # paf_mask```
数据加载
```
#创建数据加载器
batch_size = 8train_dataloader = data.DataLoader(train_dataset, batch_size=batch_size, shuffle=True)val_dataloader = data.DataLoader(val_dataset, batch_size=batch_size, shuffle=False)#集中保存到字典型变量中
dataloaders_dict = {"train": train_dataloader, "val": val_dataloader}#确认执行结果
batch_iterator = iter(dataloaders_dict["train"]) #转换为迭代器
item = next(batch_iterator) #读取第一个元素
print(item[0].shape) # img
print(item[1].shape) # heatmaps,
print(item[2].shape) # heat_mask
print(item[3].shape) # pafs
print(item[4].shape) # paf_mask```### OpenPose 网络
OpenPose 共由 7 个模块组成,首先提取图像的Feature 模块,用于数据 heatmaps 和 PAFs 的 stage 模块,stage 模块包括 stage1 到 stage6。Feature 使用的是 VGG-19,输出是原图像的 1/8,最终输出是 128*46*46。Feature 输出的的数据会输入到 Stage1 中,Stage1 中包含两个模块 block1_1和 block1_2,block1_1 输出PAFs 的子网络,block1_2是输出 heatmap的子网络,分别为 38*46*36 和 19*46*46。可以直接试用 stage1 的输出,但是 stage1 的效果非常有限,如果需要更高精度,可以将stage1 的输出与feature 的输出进行合并,并输入到下一个 stage 中。
```
# 导入软件包
import torch
import torch.nn as nn
from torch.nn import init
import torchvisionclass OpenPoseNet(nn.Module):def __init__(self):super(OpenPoseNet, self).__init__()#Feature模块self.model0 = OpenPose_Feature()#Stage模块#PAFs部分self.model1_1 = make_OpenPose_block('block1_1')self.model2_1 = make_OpenPose_block('block2_1')self.model3_1 = make_OpenPose_block('block3_1')self.model4_1 = make_OpenPose_block('block4_1')self.model5_1 = make_OpenPose_block('block5_1')self.model6_1 = make_OpenPose_block('block6_1')#confidence heatmap部分self.model1_2 = make_OpenPose_block('block1_2')self.model2_2 = make_OpenPose_block('block2_2')self.model3_2 = make_OpenPose_block('block3_2')self.model4_2 = make_OpenPose_block('block4_2')self.model5_2 = make_OpenPose_block('block5_2')self.model6_2 = make_OpenPose_block('block6_2')def forward(self, x):"""定义正向传播函数"""#Feature模块out1 = self.model0(x)# Stage1out1_1 = self.model1_1(out1) #PAFs部分out1_2 = self.model1_2(out1) # confidence heatmap部分# CStage2out2 = torch.cat([out1_1, out1_2, out1], 1) #用一维的通道进行合并out2_1 = self.model2_1(out2)out2_2 = self.model2_2(out2)# Stage3out3 = torch.cat([out2_1, out2_2, out1], 1)out3_1 = self.model3_1(out3)out3_2 = self.model3_2(out3)# Stage4out4 = torch.cat([out3_1, out3_2, out1], 1)out4_1 = self.model4_1(out4)out4_2 = self.model4_2(out4)# Stage5out5 = torch.cat([out4_1, out4_2, out1], 1)out5_1 = self.model5_1(out5)out5_2 = self.model5_2(out5)# Stage6out6 = torch.cat([out5_1, out5_2, out1], 1)out6_1 = self.model6_1(out6)out6_2 = self.model6_2(out6)#保存每个Stage的结果,以用于损失计算saved_for_loss = []saved_for_loss.append(out1_1) #PAFs部分saved_for_loss.append(out1_2) # confidence heatmap部分saved_for_loss.append(out2_1)saved_for_loss.append(out2_2)saved_for_loss.append(out3_1)saved_for_loss.append(out3_2)saved_for_loss.append(out4_1)saved_for_loss.append(out4_2)saved_for_loss.append(out5_1)saved_for_loss.append(out5_2)saved_for_loss.append(out6_1)saved_for_loss.append(out6_2)#最后输出PAFs的out6_1和confidence heatmap的out6_2,以及#保存着用于损失计算的每个Stage的PAFs和heatmap的saved_for_loss变量# out6_1:torch.Size([minibatch, 38, 46, 46])# out6_2:torch.Size([minibatch, 19, 46, 46])# saved_for_loss:[out1_1, out_1_2, ・・・, out6_2]return (out6_1, out6_2), saved_for_loss```
Feature 模块
```
class OpenPose_Feature(nn.Module):def __init__(self):super(OpenPose_Feature, self).__init__()#使用VGG−19开头的10个卷积层#第一次执行时,由于需要载入模型的权重参数,因此所需执行时间较长vgg19 = torchvision.models.vgg19(pretrained=True)model = {}model['block0'] = vgg19.features[0:23] #到VGG-19开头的10个卷积层为止#再准备两个新的卷积层model['block0'].add_module("23", torch.nn.Conv2d(512, 256, kernel_size=3, stride=1, padding=1))model['block0'].add_module("24", torch.nn.ReLU(inplace=True))model['block0'].add_module("25", torch.nn.Conv2d(256, 128, kernel_size=3, stride=1, padding=1))model['block0'].add_module("26", torch.nn.ReLU(inplace=True))self.model = model['block0']def forward(self, x):outputs = self.model(x)return outputs```
Stage 模块
```
def make_OpenPose_block(block_name):"""根据配置参数变量创建OpenPose的Stage模块的block这里使用的不是nn.Module,而是nn.Sequential"""#1. 创建配置参数的字典型变量blocks,并用其创建网络#从一开始就设置好全部模式的字典,创建时只使用block_name参数指定的值blocks = {}# Stage 1blocks['block1_1'] = [{'conv5_1_CPM_L1': [128, 128, 3, 1, 1]},{'conv5_2_CPM_L1': [128, 128, 3, 1, 1]},{'conv5_3_CPM_L1': [128, 128, 3, 1, 1]},{'conv5_4_CPM_L1': [128, 512, 1, 1, 0]},{'conv5_5_CPM_L1': [512, 38, 1, 1, 0]}]blocks['block1_2'] = [{'conv5_1_CPM_L2': [128, 128, 3, 1, 1]},{'conv5_2_CPM_L2': [128, 128, 3, 1, 1]},{'conv5_3_CPM_L2': [128, 128, 3, 1, 1]},{'conv5_4_CPM_L2': [128, 512, 1, 1, 0]},{'conv5_5_CPM_L2': [512, 19, 1, 1, 0]}]# Stages 2 - 6for i in range(2, 7):blocks['block%d_1' % i] = [{'Mconv1_stage%d_L1' % i: [185, 128, 7, 1, 3]},{'Mconv2_stage%d_L1' % i: [128, 128, 7, 1, 3]},{'Mconv3_stage%d_L1' % i: [128, 128, 7, 1, 3]},{'Mconv4_stage%d_L1' % i: [128, 128, 7, 1, 3]},{'Mconv5_stage%d_L1' % i: [128, 128, 7, 1, 3]},{'Mconv6_stage%d_L1' % i: [128, 128, 1, 1, 0]},{'Mconv7_stage%d_L1' % i: [128, 38, 1, 1, 0]}]blocks['block%d_2' % i] = [{'Mconv1_stage%d_L2' % i: [185, 128, 7, 1, 3]},{'Mconv2_stage%d_L2' % i: [128, 128, 7, 1, 3]},{'Mconv3_stage%d_L2' % i: [128, 128, 7, 1, 3]},{'Mconv4_stage%d_L2' % i: [128, 128, 7, 1, 3]},{'Mconv5_stage%d_L2' % i: [128, 128, 7, 1, 3]},{'Mconv6_stage%d_L2' % i: [128, 128, 1, 1, 0]},{'Mconv7_stage%d_L2' % i: [128, 19, 1, 1, 0]}]#取出block_name参数的配置参数字典cfg_dict = blocks[block_name]#2.将配置参数的内容保存到列表变量layers中layers = []#创建从0层到最后一层的网络for i in range(len(cfg_dict)):for k, v in cfg_dict[i].items():if 'pool' in k:layers += [nn.MaxPool2d(kernel_size=v[0], stride=v[1],padding=v[2])]else:conv2d = nn.Conv2d(in_channels=v[0], out_channels=v[1],kernel_size=v[2], stride=v[3],padding=v[4])layers += [conv2d, nn.ReLU(inplace=True)]#3.将layers传入Sequential#但是,由于最后的ReLU是不需要的,因此在那之前截止net = nn.Sequential(*layers[:-1])#4.设置初始化函数,对卷积层进行初始化def _initialize_weights_norm(self):for m in self.modules():if isinstance(m, nn.Conv2d):init.normal_(m.weight, std=0.01)if m.bias is not None:init.constant_(m.bias, 0.0)net.apply(_initialize_weights_norm)return net#定义模型
net = OpenPoseNet()
net.train()#生成伪数据
batch_size = 2
dummy_img = torch.rand(batch_size, 3, 368, 368)#计算
outputs = net(dummy_img)
print(outputs)```### 可视化网络
安装 tensorboardX 实现网络可视化,通过将网络模型转为graph 文件,启动tensorboardX,并通过浏览器查看。
```
#安装
pip install tensorflow pip install tensorboardx
```
```
# 导入软件包
import torchfrom utils.openpose_net import OpenPoseNet
#准备网络模型
net = OpenPoseNet()
net.train()from tensorboardX import SummaryWriter#2.准备用于保存到tbX文件夹中的writer
#如果tbX文件夹不存在,就自动创建
writer = SummaryWriter("./tbX/")#3.创建用于传递给网络的伪数据
batch_size = 2
dummy_img = torch.rand(batch_size, 3, 368, 368)##4.针对OpenPose的实例net,将伪数据
#dummy_img传入时的graph保存到writer中
writer.add_graph(net, (dummy_img, ))
writer.close()
```
启动 tensorboard --logdir="./tbX/" 通过浏览器访问http://localhost:6006,如下图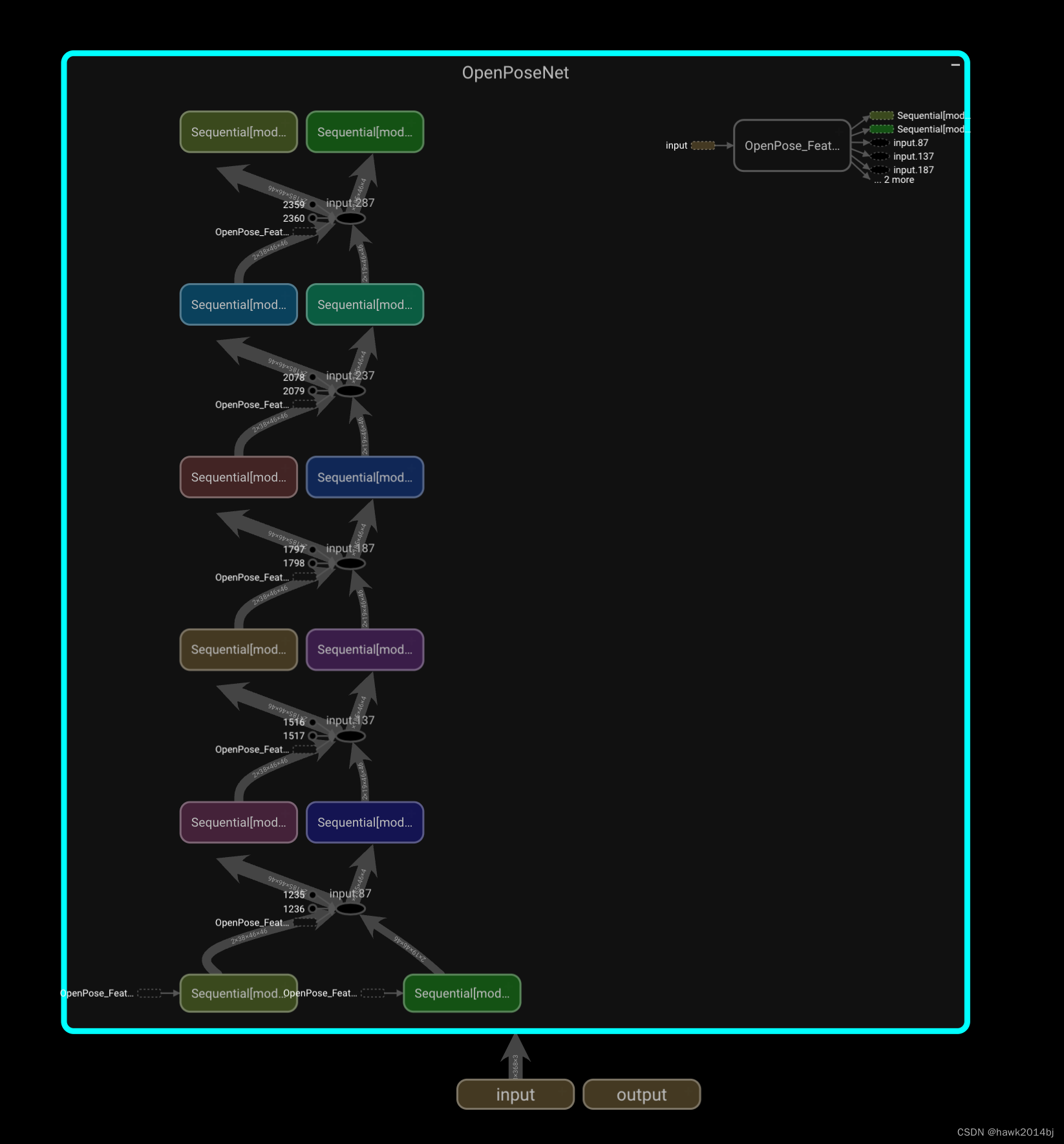### 训练、验证模型
定义损失函数,OpenPose 属于回归问题,所以这里使用是最为常用的均方差函数。
```
# 导入软件包
import random
import math
import time
import pandas as pd
import numpy as np
import torch
import torch.utils.data as data
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim# 初期設定
# Setup seeds
torch.manual_seed(1234)
np.random.seed(1234)
random.seed(1234)from utils.dataloader import make_datapath_list, DataTransform, COCOkeypointsDataset#创建MS COCO的文件路径列表
train_img_list, train_mask_list, val_img_list, val_mask_list, train_meta_list, val_meta_list = make_datapath_list(rootpath="./data/")#生成Dataset
#需要注意的是,在本书中由于考虑到数据量的问题,在这里train是用val_list生成的
train_dataset = COCOkeypointsDataset(val_img_list, val_mask_list, val_meta_list, phase="train", transform=DataTransform())#这次进行的是简单的学习,不需要创建验证数据
# val_dataset = CocokeypointsDataset(val_img_list, val_mask_list, val_meta_list, phase="val", transform=DataTransform())#创建DataLoader
batch_size = 32train_dataloader = data.DataLoader(train_dataset, batch_size=batch_size, shuffle=True)# val_dataloader = data.DataLoader(
# val_dataset, batch_size=batch_size, shuffle=False)#集中保存到字典型变量中
# dataloaders_dict = {"train": train_dataloader, "val": val_dataloader}
dataloaders_dict = {"train": train_dataloader, "val": None}from utils.openpose_net import OpenPoseNet
net = OpenPoseNet()#设置损失函数
class OpenPoseLoss(nn.Module):"""这是OpenPose的损失函数类"""def __init__(self):super(OpenPoseLoss, self).__init__()def forward(self, saved_for_loss, heatmap_target, heat_mask, paf_target, paf_mask):"""损失函数的计算Parameters----------saved_for_loss : OpenPoseNet 输出(列表)heatmap_target : [num_batch, 19, 46, 46]正确答案部分的标注信息heatmap_mask : [num_batch, 19, 46, 46]heatmap图像的mask maskpaf_target : [num_batch, 38, 46, 46]正确答案的PAFs的标注信息paf_mask : [num_batch, 38, 46, 46]PAFs图像的maskReturns-------loss : 张量损失值"""total_loss = 0#以Stage为单位进行计算for j in range(6):# 对于PAFs和heatmaps,被掩码的部分将被忽略(paf_mask=0等)# PAFspred1 = saved_for_loss[2 * j] * paf_maskgt1 = paf_target.float() * paf_mask# heatmapspred2 = saved_for_loss[2 * j + 1] * heat_maskgt2 = heatmap_target.float()*heat_masktotal_loss += F.mse_loss(pred1, gt1, reduction='mean') + \F.mse_loss(pred2, gt2, reduction='mean')return total_losscriterion = OpenPoseLoss()optimizer = optim.SGD(net.parameters(), lr=1e-2,momentum=0.9,weight_decay=0.0001)#创建用于训练模型的函数def train_model(net, dataloaders_dict, criterion, optimizer, num_epochs):#确认是否能够使用GPUdevice = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")print("使用的设备:", device)#将网络载入GPU中net.to(device)#如果网络结构比较固定,则开启硬件加速torch.backends.cudnn.benchmark = True#图像的张数num_train_imgs = len(dataloaders_dict["train"].dataset)batch_size = dataloaders_dict["train"].batch_size#设置迭代计数器iteration = 1#epoch循环for epoch in range(num_epochs):#保存开始时间t_epoch_start = time.time()t_iter_start = time.time()epoch_train_loss = 0.0 #epoch的损失和epoch_val_loss = 0.0 #epoch的损失和print('-------------')print('Epoch {}/{}'.format(epoch+1, num_epochs))print('-------------')#每轮epoch的训练和验证循环for phase in ['train', 'val']:if phase == 'train':net.train() #将模型设置为训练模式optimizer.zero_grad()print('(train)')#这次跳过验证处理else:continue# net.eval() #将模型设置为验证模式# print('-------------')# print('(val)')#从数据加载器中将小批量逐个取出进行循环处理for imges, heatmap_target, heat_mask, paf_target, paf_mask in dataloaders_dict[phase]:#如果小批量的尺寸为1,会导致批次正规化处理失败,因此需要避免if imges.size()[0] == 1:continue#如果GPU可以使用,则将数据输送到GPU中imges = imges.to(device)heatmap_target = heatmap_target.to(device)heat_mask = heat_mask.to(device)paf_target = paf_target.to(device)paf_mask = paf_mask.to(device)#初始化optimizeroptimizer.zero_grad()#正向传播计算with torch.set_grad_enabled(phase == 'train'):#由于(out6_1, out6_2)是不使用的,因此用_ 代替_, saved_for_loss = net(imges)loss = criterion(saved_for_loss, heatmap_target,heat_mask, paf_target, paf_mask)#训练时进行反向传播if phase == 'train':loss.backward()optimizer.step()if (iteration % 10 == 0): #每10次迭代显示一次losst_iter_finish = time.time()duration = t_iter_finish - t_iter_startprint('迭代 {} || Loss: {:.4f} || 10iter: {:.4f} sec.'.format(iteration, loss.item()/batch_size, duration))t_iter_start = time.time()epoch_train_loss += loss.item()iteration += 1#验证时# else:#epoch_val_loss += loss.item()#epoch的每个phase的loss和准确率t_epoch_finish = time.time()print('-------------')print('epoch {} || Epoch_TRAIN_Loss:{:.4f} ||Epoch_VAL_Loss:{:.4f}'.format(epoch+1, epoch_train_loss/num_train_imgs, 0))print('timer: {:.4f} sec.'.format(t_epoch_finish - t_epoch_start))t_epoch_start = time.time()#保存最终的网络torch.save(net.state_dict(), 'weights/openpose_net_' +str(epoch+1) + '.pth')#执行学习和验证处理
num_epochs = 2
train_model(net, dataloaders_dict, criterion, optimizer, num_epochs=num_epochs)```
这篇关于Pytoch实现姿势识别模型的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





