本文主要是介绍addr2line + objdump 定位crash问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
背景
godbolt汇编工具
tombstone
ARM平台汇编知识
寄存器介绍
常见汇编指令
函数入参及传递返回值过程
入参顺序
变参函数
虚函数表
典型问题分析过程
Crash BackTrace
Addr2line
objdump
拓展
为什么SetCameraId函数地址偏移是+40(0x28)
参考
背景
最近在做项目的过程中,遇到了一个难搞定的crash问题,用addr2line还不能解决,需要借助objdump去解决。这里来做简单的分析记录一下。
godbolt汇编工具
godbolt可以在不同的编译器,将C/C++语言汇编成汇编语言。网站链接如下:Compiler Explorer
tombstone
当动态链接的可执行文件启动时,系统会注册多个信号处理程序,如果出现崩溃,这些处理程序会将一份基本崩溃转储信息写入 logcat,并将一个更详细的 Tombstone 文件写入 /data/tombstones/。具体而言,该文件包含崩溃进程中所有线程(而不只是捕捉到信号的线程)的堆栈轨迹、完整的内存映射,以及所有打开的文件描述符的列表。详细可以参考如下链接:https://source.android.com/docs/core/tests/debug?hl=zh-cn#debuggerd
ARM平台汇编知识
寄存器介绍
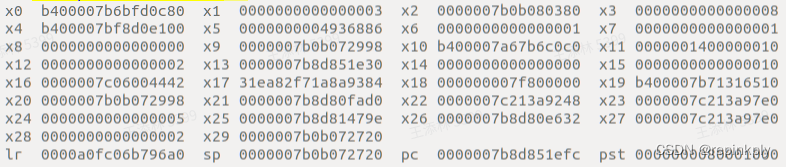
1. x0-x29为通用寄存器,运算、入参、返回值传递等过程都会用到。
AArch64 Register and Instruction Quick Start - CDOT Wiki
2. lr (Link Register)寄存器保存函数的返回地址,即一个函数调用完成后跳转回父函数,需要继续执行父函数中的指令的地址。有时也表示为x30寄存器。
3. sp (Stack Pointer)寄存器保存栈指针。
4. pc (Program Counter)寄存器保存当前正在执行的指令的地址,指令执行完后会更新为将要执行的下一条指令的地址。
5. pst (Program Status Register)程序状态寄存器,是一组用于记录处理器状态和控制处理器行为的位字段。
6. wzr/xzr :32位/64位的零寄存器。
常见汇编指令
1. ldr (load register):内存中的值保存到寄存器中,ldr w8, [sp, #12] 的作用是把栈上sp+12位置的值保存到w8寄存器中。
2. str (store register):寄存器中的值保存到内存里,str wzr, [sp, #12] 的作用是把32位零寄存器的值写入到栈上sp+12的位置。
3. add:加法运算,add w8, w8, w9 的作用是把w8 + w9的计算结果储存到w8中。
4. sub:减法运算:,sub sp, sp, #16 的作用是把sp-16的计算结果储存到sp中(移动栈指针)。
5. ret:执行此指令将跳转回lr寄存器中保存的地址。
6. bl:将此指令的顺序下一条指令地址保存到lr寄存器,并跳转到指定地址。
7. mov:寄存器间的值移动,或存储立即数到寄存器。
下面来看一个简单例子:main调用函数FuncA,在FuncA中做了一个加法并返回结果,保存在main函数栈上的res中。(clang -O0)

逐条解释汇编代码:
FuncA(): // @FuncA()sub sp, sp, #16 //开辟FuncA()栈空间 str wzr, [sp, #12] //将0保存在,栈空间 sp+12 位置处mov w8, #1 //将1存到w8寄存器中 // =0x1str w8, [sp, #8] //将w8寄存器中的值,保存在 sp+8 位置处ldr w8, [sp, #12] //将栈上内存位置为sp+12的值 ,读到w8中ldr w9, [sp, #8] //将栈上内存位置为sp+8的值 ,读到w9中add w8, w8, w9 //w8寄存器中值 + w9寄存器中的值 保存到 w8中str w8, [sp, #4] //将w8寄存器中的值,保存到栈上 sp+4的位置上ldr w0, [sp, #4] //将栈上sp+4的值,保存到 w0寄存器中add sp, sp, #16 //退栈,归还 FuncA函数栈空间ret //返回
main: // @mainsub sp, sp, #32 //开辟main函数栈空间stp x29, x30, [sp, #16] //存储栈帧操作 // 16-byte Folded Spilladd x29, sp, #16 //将sp+16存储于x29中bl FuncA() //跳转到 FuncA()stur w0, [x29, #-4] //将w0寄存器中的值读到 x29-4处mov w0, wzrldp x29, x30, [sp, #16] // 16-byte Folded Reloadadd sp, sp, #32 //归还 main函数栈空间ret以下是main函数和FuncA的栈空间示意图,"mem align"是为内存对齐留空。

函数入参及传递返回值过程
以一个有10个参数的函数funcA为例:
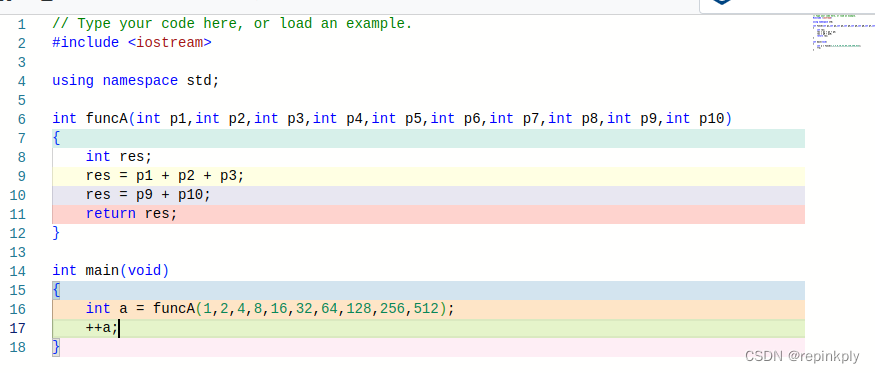

前8个参数(1、2、4、8、16、32、64、128)按顺序使用w0-w7寄存器来入参,而p9 p10这两个参数是直接保存在main的栈空间上,接下来看下funcA是怎么使用这两个参数的:

funcA在越过自己的栈空间,把位于main函数栈空间上的p9和p10复制到自己的栈空间上,然后在后续流程中使用(据我测试,GCC编译器会省掉这个复制过程,直接越过自己的栈空间取值到寄存器做加法)。同时可以看到这里w0被用来传递返回值。
入参顺序
在上一个例子里,如果把入参部分改为:

在clang编译后入参部分就会变成:

FuncA中实际入参p1~p10的值是1~10,p1 + p2 + p3 = 3,p9 + p10 = 19
而在GCC编译器下,会先运算所有++,再逐个入参,也就是例子中所有实际入参的参数都是10,相应的执行结果也会变成p1 + p2 + p3 = 30,p9 + p10 = 20;如果把参数都改成d++,clang入参是0~9,GCC则是9~0;
关于编译器间的微妙差异,各位可到https://godbolt.org/自行深入探索。
变参函数
printf是最常用的变参函数,变参函数的入参过程和普通函数类似,优先使用x0-x7寄存器,超出部分保存在父函数的栈上。
变参函数一定会将x0-x7的值入栈,第九个及其他参数则会越过自身栈空间去父函数的栈上读取。变参函数需要严格检查入参个数,对于printf,它是通过format字符串来确认入参个数的。这也是为什么当printf中漏掉参数时会输出无效值,它可能是寄存器上的值,也可能是栈空间上的某个值,取决于它具体是第几个参数。
下面是一个自定义变参函数示例:
#include <iostream>
#include <cstdarg>
using namespace std;int sum(int count, ...) {va_list ap;va_start(ap, count);int res = 0;for (int i = 0; i < count; i++) {res += va_arg(ap, int); // 需指定类型}va_end(ap);return res;
}int main(void)
{sum(30,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30);
}虚函数表
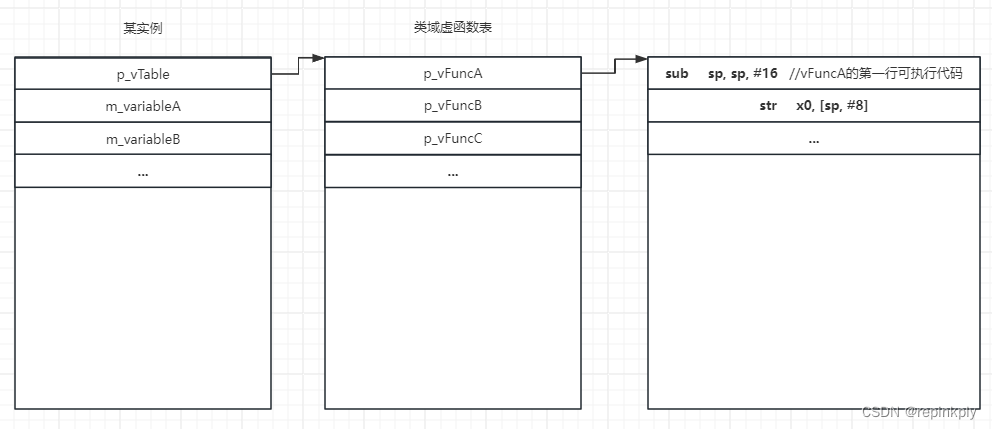
当一个类或者其基类的定义中存在虚函数时,这个类的实例的内存起始位置会保存一个指针指向类域的虚函数表(即,这个类的所有对象共用同一张虚函数表)。虚函数表的数据结构类似一个数组,按函数的声明顺序保存了所有虚函数的函数起始地址。
虚函数表存储在ELF的只读数据段(.rodata)、虚函数存储在代码段(.text)。
典型问题分析过程
以空指针解引用问题为例。
Crash BackTrace

从 crash 信息可以初步看出问题类型是null pointer dereference,这种问题一般借助addr2line至少可以找到是哪个空指针被解引用。用 addr2line 去解析问题 daily 包的 symbol 库(在vendor组件中下载),可以初步看下挂在哪里。
Addr2line
# 代码根目录下
./prebuilts/clang/host/linux-x86/clang-r450784e/bin/llvm-addr2line -Cipfe com.qti.stats.aec.so 000000000004fefc

addr2line的解析结果会显示目标地址对应的代码文件和行号,000000000004fefc这个crash地址对应的位置如上图,这一行有三处显性的指针解引用:两处对pAECAlgo,一处对pAlgo。
但从代码逻辑上看,能够走到这里就足以证明这两个指针都不为空。可以用objdump反汇编symbol库,进一步定位crash的地方究竟是解引用了哪个空指针。
objdump
# objdump结果输出到res.txt供后续查看
./prebuilts/clang/host/linux-x86/clang-r450784e/bin/llvm-objdump -d com.qti.stats.aec.so > res.txt更多objdump命令参数:objdump命令解析-CSDN博客
4fefc附近反汇编片段截取如下:


pAECAlgo的类型是AECAlgorithm_Internal*,这个指针被解引用两次:其中一次是pAECAlgo->cameraId做函数入参,从结构体定义可以确认pAECAlgo->cameraId的地址偏移是68,在上面的汇编片段里只有4fef4这一行存在68这个偏移,其功能是从x19+68取值保存在w1寄存器中,而在w1未被覆盖的情况下程序就在4ff00进行了跳转,所以4fef4这一行有可能是一个入参操作。有足够的证据表明,此处x19保存的应该就是pAECAlgo。继续向上追溯的话,可以发现这里的x19来自函数入参,与代码也能对应上。
再看4fef0这一行,这里从x19+40读取内存到x0,从结构体定义可以确定pAECAlgo->pAlgo的地址偏移是40,而它保存在x0寄存器可能是调用类函数时的隐藏入参this指针。因此此处x0保存的就是pAECAlgo->pAlgo。
4fef8行从x0直接无偏移取值到x8,通过查找pAECAlgo->pAlgo的类型定义可以确定pAECAlgo->pAlgo指向的实例,其所属的类中存在虚函数,因此这行取值一定会取到类域的虚函数表指针。即x8保存了虚函数表指针。
下一行4fefc在虚函数表指针上加偏移40读取内存到x9,结合代码可以推断这可能是setCameraId的虚函数地址,通过查定义setCameraId的确是一个虚函数,符合推断。
下一行程序跳转到x9所指位置,是一个函数跳转动作,程序将跳转到setCameraId中执行。
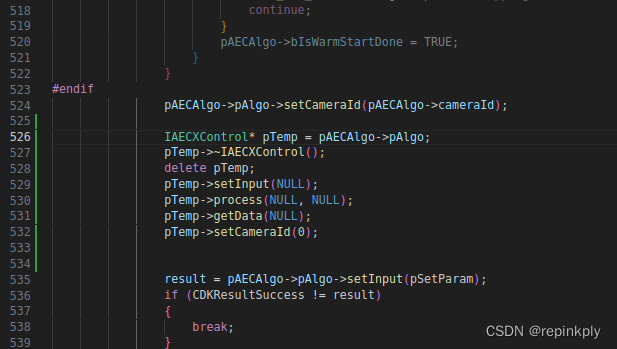
AECAlgorithm_Internal* pAECAlgo = reinterpret_cast<AECAlgorithm_Internal*>(pAECAlgorithm);
// crash line
pAECAlgo->pAlgo->setCameraId(pAECAlgo->cameraId);// struct defines
typedef struct /** @cond */ CHIAECAlgorithm /** @endcond */
{CDKResult (*AECProcess)(CHIAECAlgorithm* pCHIAECAlgorithm, const AECAlgoInputList* pInput, AECAlgoOutputList* pOutput);CDKResult (*AECGetParam)(CHIAECAlgorithm* pCHIAECAlgorithm, AECAlgoGetParam* pGetParam);CDKResult (*AECSetParam)(CHIAECAlgorithm* pCHIAECAlgorithm, const AECAlgoSetParamList* pSetParam);CDKResult (*AECGetFeatureCapability)(CHIAECAlgorithm* pCHIAECAlgorithm, UINT64* pFeatures);VOID (*AECDestroy)(CHIAECAlgorithm* pCHIAECAlgorithm, const AECAlgoDestroyParamList* pDestroyParams);
} CHIAECAlgorithm;struct AECAlgorithm_Internal : public CHIAECAlgorithm
{IAECXControl* pAlgo;VOID* pLogs;BOOL bDepthAECEnable;BOOL bIsWarmStartDone;UINT instanceCount;UINT cameraId;
};问题JIRA中贴的分析:

pAlgo是指向CAECXControl实例的指针,这个类继承于基类IAECXControl,整个解引用过程如下:

从tombStone中可以看到pAlgo(保存在x0寄存器)指向的内存,也就是IAECXControl实例所在位置附近的情况:

拓展
为什么SetCameraId函数地址偏移是+40(0x28)
单从.h文件里的声明来看,SetCameraId是第五个虚函数,在虚函数表中的偏移应该是 4 * 8 = 32
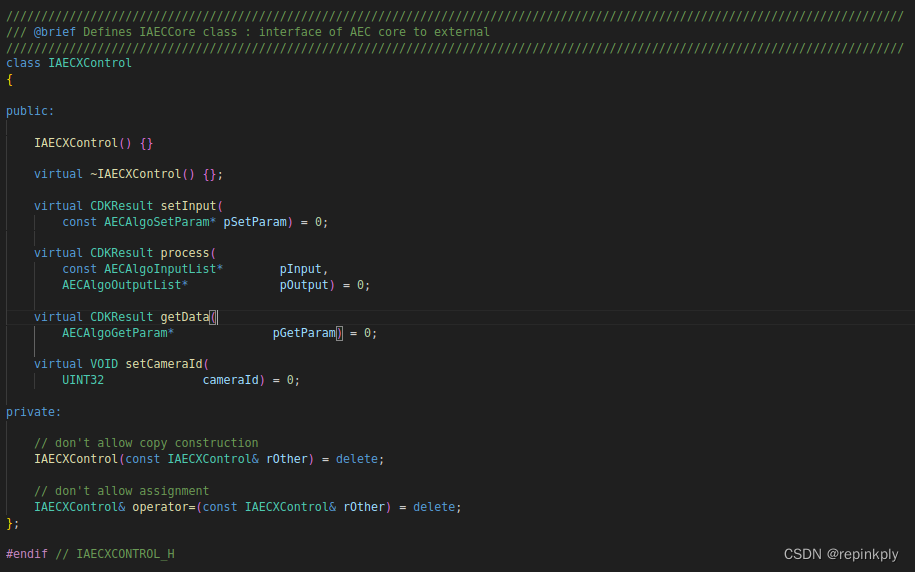
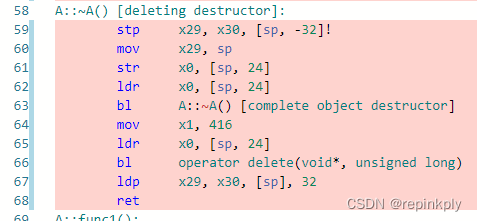
这个问题涉及到deleting destructor,由于这个类涉及继承,子类的虚函数表+0位置的是普通析构 complete object destructor,但在+8位置还有一个 deleting destructor。
在这里插入实验代码段,编译后再反汇编查看结果,可以看到直接调用析构时调用了虚函数表+0位置的析构,使用delete operator时调用了虚函数表+8位置的deleting析构。

为什么需要deleting destructor
delete行为分为析构和内存释放(operator delete),正确的析构行为可以通过调用虚析构函数实现,而内存释放时不止需要知道对象的地址,还需要知道实例的实际大小(有时子类和基类实例的内存占用大小不一样)。deleting destructor可以理解为delete的一个virtual封装,里面既调用了析构函数,也调用了operator delete去释放正确的内存。
举例说明(ARM64 GCC):

x1是delete的入参之一,内存释放的size,一个Base实例的size为:
8Byte 虚函数表指针 + 4Byte int[1] + 4Byte 内存对齐留空 = 16

相较Base实例,A实例的size多了400字节的int[100],它deleting destructor中入参的size也有所不同:
参考
C++中的deleting destructor :https://zhuanlan.zhihu.com/p/26392392
Compiler Expolorer : https://godbolt.org/
寄存器 :https://blog.csdn.net/vviccc/article/details/134428965
这篇关于addr2line + objdump 定位crash问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




