本文主要是介绍【数据结构(邓俊辉)学习笔记】向量03——常规向量,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 0.概述
- 1.元素访问
- 2.置乱器
- 3.判等器与比较器
- 4.无序查找
- 4.1 判等器
- 4.2 顺序查找
- 4.3 实现
- 4.4 复杂度
- 5. 插入
- 5.1 算法实现
- 5.2 复杂度分析
- 6. 删除
- 6.1 区间删除
- 6.2 单元删除
- 6.3 复杂度
- 7. 唯一化
- 7.1 实现
- 7.2 正确性
- 7.3 复杂度
- 8. 遍历
- 8.1 实现
- 8.2 复杂度
- 9. 总结
0.概述
记录向量的元素访问、插入、区间删除、单元素删除、查找、唯一化、遍历算法。
1.元素访问
重载操作符"[]",使元素访问更加便捷。

template <typename T> T & Vector<T>::operator[] ( Rank r ) //重载下标操作符
{ return _elem[r]; } // assert: 0 <= r < _sizetemplate <typename T> const T & Vector<T>::operator[] ( Rank r ) const //仅限于做右值
{ return _elem[r]; } // assert: 0 <= r < _size
经重载后操作符“[]”返回的是对数组元素的引用,这就意味着它既可以取代get()操作(通常作为赋值表达式的右值),也可以取代set()操作(通常作为左值)。
2.置乱器
目标:借助操作符 “[]” 随机置乱向量,使各元素等概率出现于各位置。
策略:自后向前,依次将各元素与随机选取的某一前驱(含自身)做交换
template <typename T> void permute ( Vector<T>& V ) { //随机置乱向量,使各元素等概率出现于各位置for ( int i = V.size(); i > 0; i-- ) //自后向前swap ( V[i - 1], V[rand() % i] ); //V[i - 1]与V[0, i)中某一随机元素交换
}
从待置乱区间的末元素开始,逆序地向前逐一处理各元素。

注意,这里的交换操作swap(),隐含了三次基于重载操作符“[]”的赋值。
- 通过反复调用 permute()算法,可以生成向量 V[0, n)的所有 n!种排列。
- 由该算法生成的排列中,各元素处于任一位置的概率均为 1/n
- 该算法生成各排列的概率均为 1/n!
3.判等器与比较器
算法思想:
- 可比较或可比对的任何数据类型,而不必关心如何定义以及判定其大小或相等关系。
- 将比对和比较操作的具体实现剥离出来,直接讨论算法流程本身。
- 在定义对应的数据类型时,通过重载"<“和”=="之类的操作符,给出大小和相等关系的具体定义及其判别方法。
template <typename T> static bool lt ( T* a, T* b ) { return lt ( *a, *b ); } //less than
template <typename T> static bool lt ( T& a, T& b ) { return a < b; } //less than
template <typename T> static bool eq ( T* a, T* b ) { return eq ( *a, *b ); } //equal
template <typename T> static bool eq ( T& a, T& b ) { return a == b; } //equal
在一些复杂的数据结构中,内部元素本身的类型可能就是指向其它对象的指针;而从外部更多关注的,则往往是其所指对象的大小。若不加处理而直接根据指针的数值(即被指对象的物理地址)进行比较,则所得结果将毫无意义。
4.无序查找
4.1 判等器
Vector::find(e)接口,功能语义为“查找与数据对象e相等的元素”。这同时也暗示着,向量元素可通过相互比对判等,但未必支持比较的向量,称作无序向量(unsorted vector)。
4.2 顺序查找

从末元素起自后向前,逐一取出各个元素并与目标元素e进行比对,直至发现与之相等者(查找成功),或者直至检查过所有元素之后仍未找到相等者(查找失败)。这种依次逐个比对的查找方式,称作顺序查找。
4.3 实现
template <typename T> //在无序向量中顺序查找e:成功则返回最靠后的出现位置,否则返回lo-1
Rank Vector<T>::find ( T const& e, Rank lo, Rank hi ) const { //0 <= lo < hi <= _sizewhile ( ( lo < hi-- ) && ( e != _elem[hi] ) ); //从后向前,顺序查找return hi; //若hi < lo,则意味着失败;否则hi即命中元素的秩
}
细节:
- 当同时有多个命中元素时,统一约定返回其中秩最大者
- while循环的控制逻辑由两部分组成,首先判断是否已抵达lo,再判断当前元素与目标元素是否相等。得益于C/C++语言中逻辑表达式的短路求值特性,在前一判断非真后循环会立即终止,而不致因试图引用已越界的秩(-1)而出错。
4.4 复杂度
最坏情况 查找终止于首元素_elem[lo],运行时间为O(hi - lo) = O(n)。
最好情况 查找命中于末元素_elem[hi - 1],仅需O(1)时间。
对于规模相同、内部组成不同的输入,渐进运行时间却有本质区别,故此类算法也称作输入敏感的算法。
5. 插入
5.1 算法实现
算法思想:插入之前必须首先调用expand()算法,核对是否即将溢出。
template <typename T> //将e插入至[r]
Rank Vector<T>::insert ( Rank r, T const& e ) { //0 <= r <= sizeexpand(); //如必要,先扩容for ( Rank i = _size; r < i; i-- ) //自后向前,后继元素_elem[i] = _elem[i-1]; //顺次后移一个单元_elem[r] = e; _size++; //置入新元素并更新容量return r; //返回秩
}
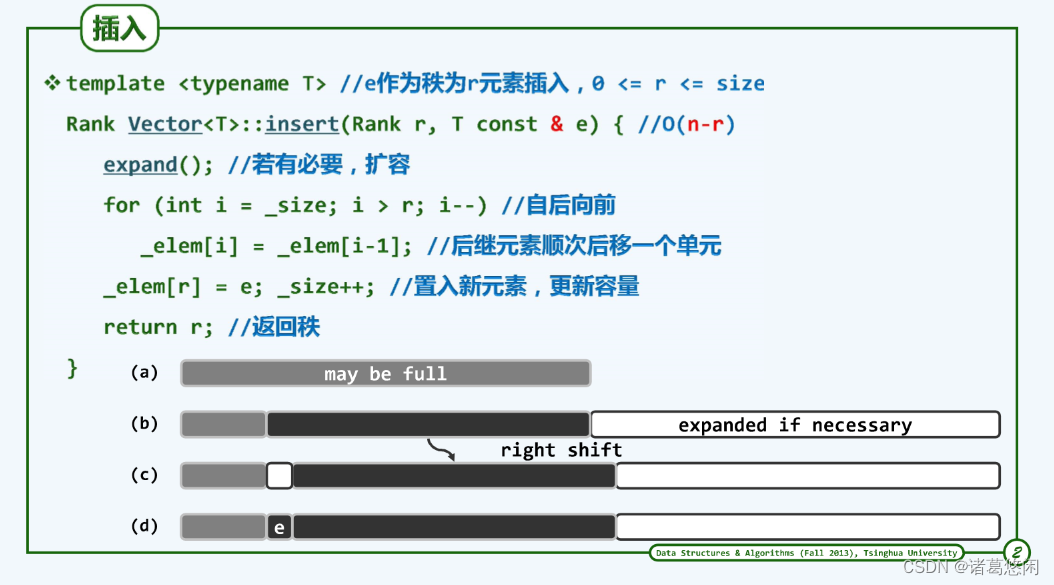
为保证数组元素物理地址连续的特性,随后需要将后缀_elem[r, _size)(如果非空)整体后移一个单元(图©)。这些后继元素自后向前的搬迁次序不能颠倒,否则会因元素被覆盖而造成数据丢失。在单元_elem[r]腾出之后,方可将待插入对象e置入其中(图(d))。
5.2 复杂度分析
时间主要消耗于后继元素的后移,线性正比于后缀的长度,故总体为O(_size - r + 1)。
r取最大值_size时为最好情况,只需O(1)时间;r取最小值0时为最坏情况,需要O(_size)时间。
若插入位置等概率分布,则平均运行时间为O(_size) = O(n)
运行时间主要来自于后继元素顺次后移的操作。因此对于每个插入位置而言,对应的移动操作次数恰好等于其后继元素(包含自身)的数目。不难看出它们也构成一个等差数列(数学期望O( n 2 n^2 n2) m为后继元素数目),故在等概率的假设条件下,其均值(数学期望)应渐进地与其中的最高项同阶,为O(n)。
6. 删除
应将单元素删除视作区间删除的特例,并基于后者来实现前者。
6.1 区间删除
template <typename T> Rank Vector<T>::remove( Rank lo, Rank hi ) { //0 <= lo <= hi <= nif ( lo == hi ) return 0; //出于效率考虑,单独处理退化情况while ( hi < _size ) _elem[lo++] = _elem[hi++]; //后缀[hi, _size)顺次前移hi-lo位_size = lo; shrink(); //更新规模,lo=_size之后的内容无需清零;如必要,则缩容//若有必要,则缩容return hi - lo; //返回被删除元素的数目
}
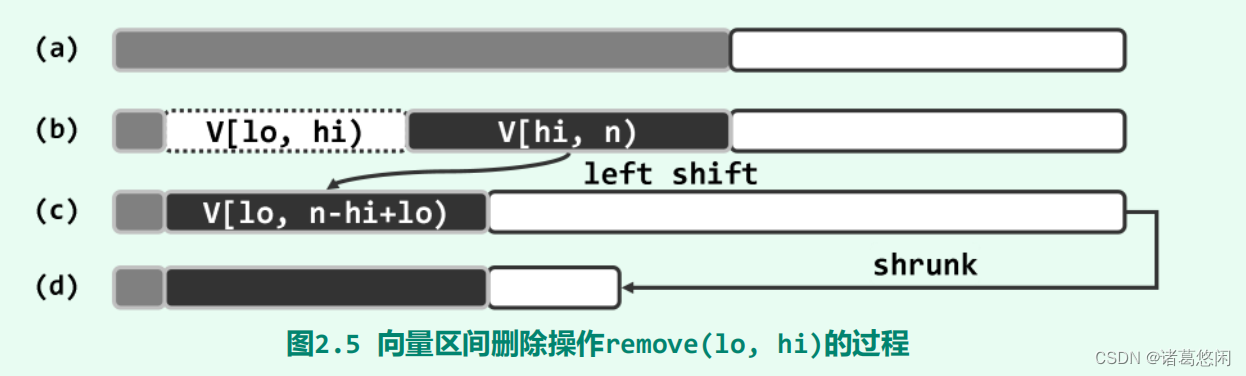
设[lo, hi)为向量(图(a))的合法区间(图(b)),则其后缀[hi, n)需整体前移hi - lo个单元(图©)。与插入算法同理,后继元素自前向后的移动次序也不能颠倒。
- 若以自后向前得次序逐个前移后继元素,位置靠前的元素,可能被位置靠后(优先移动)的元素覆盖,从而造成数据的丢失。
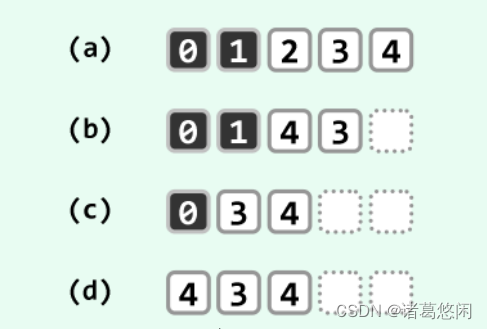
V.remove(0, 2)以删除其中的前两个元素,可见,原数据元素V[2] = 2并未顺利转移至输出向量中的V[0],即出现数据的丢失现象。
6.2 单元删除
重载即可实现如下另一同名接口remove®。
template <typename T> T Vector<T>::remove( Rank r ) { //删除向量中秩为r的元素,0 <= r < sizeT e = _elem[r]; //备份被删除元素remove( r, r + 1 ); //调用区间删除算法,等效于对区间[r, r + 1)的删除return e; //返回被删除元素
}
6.3 复杂度
remove(lo, hi)的计算成本,主要消耗于后续元素的前移,线性正比于后缀的长度,总体不过O(m + 1) = O(_size - hi + 1)。
结论:
区间删除操作所需的时间,应该仅取决于后继元素的数目,而与被删除区间本身的宽度无关。
被删除元素在向量中的位置越靠后(前)所需时间越短(长),最好为O(1),最坏为O(n) = O(_size)。
7. 唯一化
所谓向量的唯一化处理,就是剔除其中的重复元素。
7.1 实现
template <typename T> Rank Vector<T>::dedup() { //删除无序向量中重复元素(高效版)Rank oldSize = _size; //记录原规模for ( Rank i = 1; i < _size; ) //自前向后逐个考查_elem[1,_size)if ( -1 == find(_elem[i], 0, i) ) //在前缀[0,i)中寻找与[i]雷同者(至多一个),O(i)i++; //若无雷同,则继续考查其后继elseremove(i); //否则删除[i],O(_size-i)return oldSize - _size; //被删除元素总数
}
该算法自前向后逐一考查各元素_elem[i],并通过调用find()接口,在其前缀中寻找与之雷同者。若找到,则随即删除;否则,转而考查当前元素的后继。
7.2 正确性
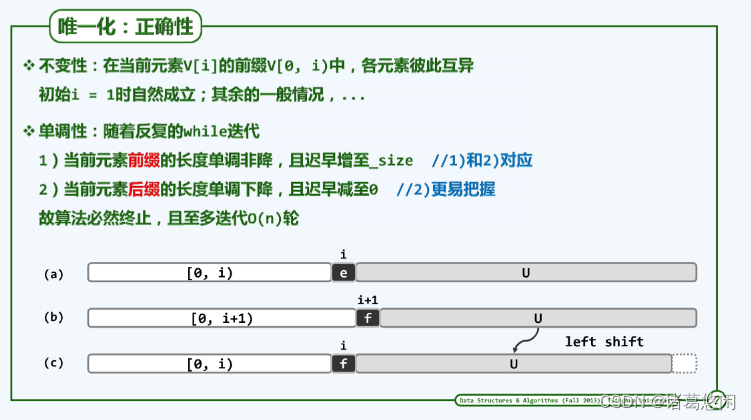
在while循环中,在当前元素的前缀_elem[0, i)内,所有元素彼此互异
7.3 复杂度
随着循环的不断进行,当前元素的后继持续地严格减少
这里所需的时间,主要消耗于find()和remove()两个接口。
find()时间应线性正比于查找区间的宽度,即前驱的总数;
remove()时间应线性正比于后继的总数。因此,每步迭代所需时间为O(n),总体复杂度应为O( n 2 n^2 n2)。
8. 遍历
8.1 实现
算法思想:
- 借助函数指针*visit()指定某一函数,该函数只有一个参数,其类型为对向量元素的引用,故通过该函数即可直接访问或修改向量元素。
- 也可以函数对象的形式,指定具体的遍历操作。这类对象的操作符“()”经重载之后,在形式上等效于一个函数接口,故此得名。
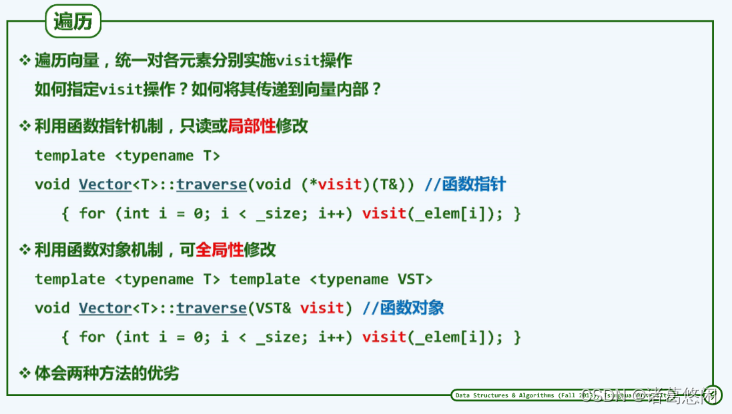
template <typename T> void Vector<T>::traverse( void ( *visit )( T& ) ) //借助函数指针机制
{ for ( Rank i = 0; i < _size; i++ ) visit( _elem[i] ); } //遍历向量template <typename T> template <typename VST> //元素类型、操作器
void Vector<T>::traverse( VST& visit ) //借助函数对象机制
{ for ( Rank i = 0; i < _size; i++ ) visit( _elem[i] ); } //遍历向量
相比较而言,后一形式的功能更强,适用范围更广。
比如,函数对象的形式支持对向量元素的关联修改。也就是说,对各元素的修改不仅可以相互独立地进行,也可以根据某个(些)元素的数值相应地修改另一元素。前一形式虽也可实现这类功能,但要繁琐很多。
例如:统一递增向量中的各元素
template <typename T> void increase ( Vector<T> & V ) //统一递增向量中的各元素
{ V.traverse ( Increase<T>() ); } //以Increase<T>()为基本操作进行遍历
8.2 复杂度
遍历操作本身只包含一层线性的循环迭代,故除了向量规模的因素之外,遍历所需时间应线性正比于所统一指定的基本操作所需的时间。故这一遍历的总体时间复杂度为O(n)。
9. 总结
- 置乱算法 permute() 从待置乱区间的末元素开始,逆序地向前逐一处理各元素。时间复杂度为O(n)。
- 顺序查找算法 find() 从末元素起自后向前,逐一取出各个元素并与目标元素进行比对,时间复杂度应线性正比于查找区间的宽度,即前驱的总数。
- 插入算法insert() ,时间复杂度线性正比于后缀的长度为。
- 删除算法remove() ,时间复杂度应该仅取决于后继元素的数目。
- 唯一化算法deduplicate(),主要消耗于find()和remove()两个接口,时间复杂度O( n 2 n^2 n2)
这篇关于【数据结构(邓俊辉)学习笔记】向量03——常规向量的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








