本文主要是介绍UE4 相机围绕某点旋转,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
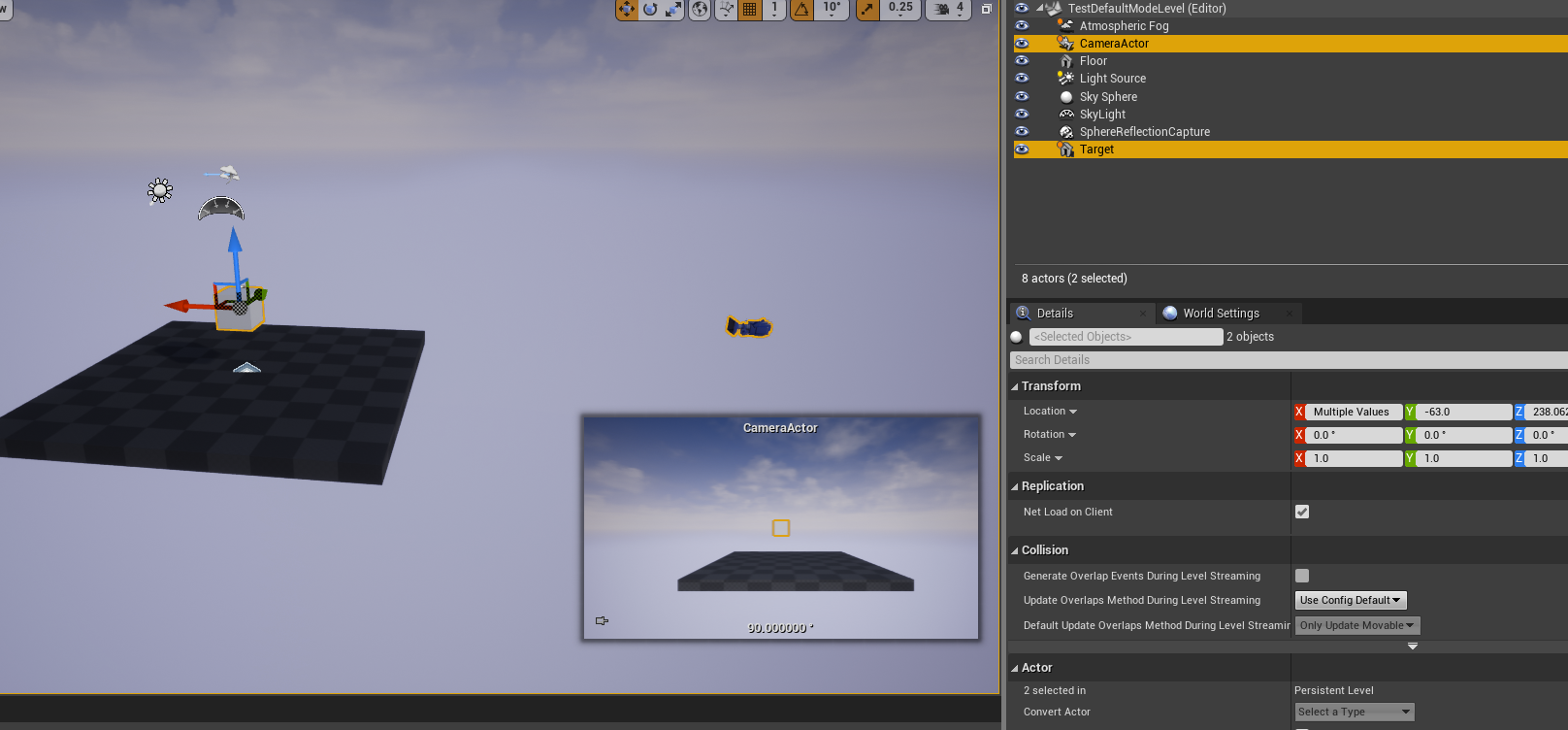
关卡(一个相机CameraActor,一个Cube(名叫Target)):
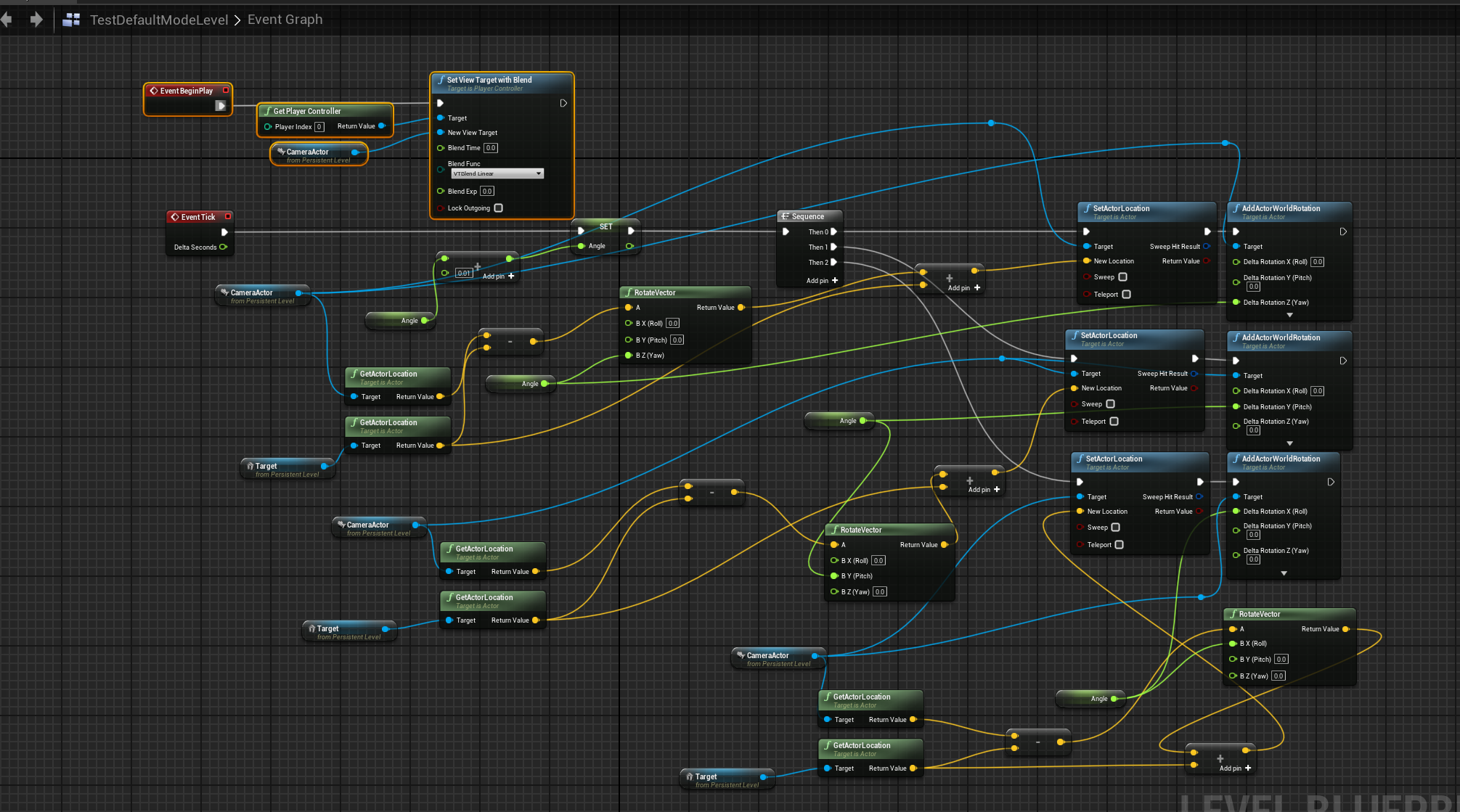
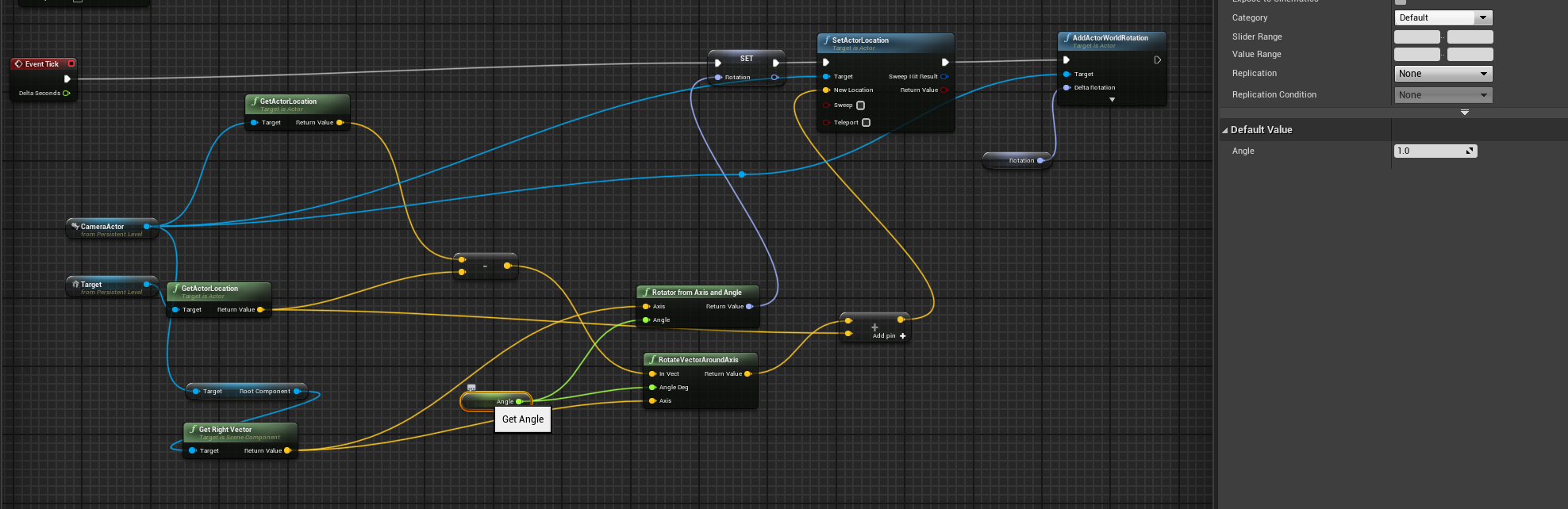
关卡蓝图里的逻辑(为了大家看得清楚,特意连得很紧凑,也比较乱,不然一张截图放不下):
只对Yaw
只Pitch:
同样对Roll:
围绕任意轴旋转
这篇关于UE4 相机围绕某点旋转的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍UE4 相机围绕某点旋转,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
关卡(一个相机CameraActor,一个Cube(名叫Target)):
关卡蓝图里的逻辑(为了大家看得清楚,特意连得很紧凑,也比较乱,不然一张截图放不下):
只对Yaw
只Pitch:
同样对Roll:
围绕任意轴旋转
这篇关于UE4 相机围绕某点旋转的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/919527。
23002807@qq.com









