本文主要是介绍实验2——基于I2C的温湿度采集,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 实验任务要求
- 一、I2C
- 二、软件I2C和硬件I2C的对比
- 三、基于I2C硬件协议的AHT20温湿度传感器的数据采集
- 连线
- 编程 烧录
- 结果
实验任务要求
- 学习I2C总线通信协议,完成基于I2C硬件协议的AHT20温湿度传感器的数据采集,并将采集的温度-湿度值通过串口输出。具体任务:
1)解释什么是“软件I2C”和“硬件I2C”? (阅读野火配套教材的第23章“I2C–读写EEPROM”原理章节)
2)阅读AHT20数据手册,编程实现:每隔2秒钟采集一次温湿度数据,并通过串口发送到上位机(win10)。
一、I2C
I2C总线接口连接微控制器和串行I2C总线。它提供多主机功能,控制所有I2C总线特定的时序、协议、仲裁和定时。支持标准和快速两种模式,同时与 SMBus 2.0 兼容。
I2C 总线有多种用途,包括 CRC 码的生成和校验、SMBus(系统管理总线 System Management Bus)、PMBus(电源管理总线 Power Management Bus)。 根据特定设备的需要,可以使用 DMA 以减轻 CPU的负担。
I2C接口接收和发送数据,并将数据从串行转换成并行,或并行转换成串行。可 以开启或禁止中断。接口通过数据引脚(SDA)和时钟引脚(SCL)连接到 I2C 总线。 允许连接到标准(高至 100 kHz)或快速(高至 400 kHz)I2C总线。
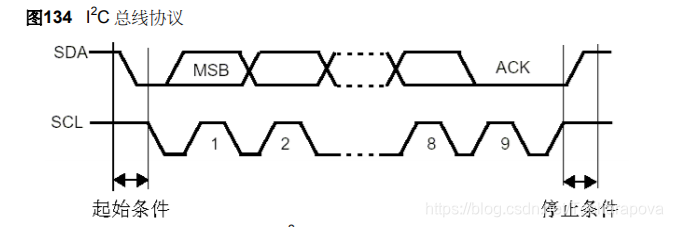
I2C总线在传送数据过程中共有三种类型信号, 它们分别是:开始信号、结束信号和应答信号。 开始信号:SCL 为高电平时,SDA
由高电平向低电平跳变,开始传送数据。 结束信号:SCL 为高电平时,SDA 由低电平向高电平跳变,结束传送数据。 应答信号:接收数据的 IC
在接收到 8bit 数据后,向发送数据的 IC 发出特定的低电平脉冲,表示已收到数据。CPU
向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU
接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
二、软件I2C和硬件I2C的对比
软件I2C
一般是使用GPIO管脚,用软件控制SCL,SDA线输出高低电平,模拟i2c协议的时序。
硬件I2C
对应芯片上的I2C外设,有相应I2C驱动电路,其所使用的I2C管脚也是专用的,因而效率要远高于软件模拟的I2C;一般也较为稳定,但是程序较为繁琐。硬件(固件)I2C是直接调用内部寄存器进行配置;而软件I2C是没有寄存器这个概念的。
对比
硬件I2C的效率要远高于软件的,而软件I2C由于不受管脚限制,接口比较灵活。
可以看IIC写函数,看里面有木有调用现成的函数或者给某个寄存器赋值,如果有,则肯定是固件IIC功能,没有的话肯定是数据一个bit一个bit模拟发生送的,肯定用到了循环,则为模拟。
根据代码量判断,模拟的代码量肯定比固件的要大。
三、基于I2C硬件协议的AHT20温湿度传感器的数据采集
连线
AHT20的SCL,GND,SDA,VCC分别对应接STM32F103指南者i2c模块的B6,GND,B7,3.3V

编程 烧录
打开野火官方提供的例程

将以下.c文件添加进去
main.c:
#include "delay.h"
#include "usart.h"
#include "bsp_i2c.h"int main(void)
{ delay_init(); //ÑÓʱº¯Êý³õʼ»¯ uart_init(115200); //´®¿Ú³õʼ»¯Îª115200IIC_Init();while(1){printf("¿ªÊ¼²âÁ¿£¬ÇëÉԵȣº");read_AHT20_once();delay_ms(2000);}
}
bsp_i2c.c:
#include "bsp_i2c.h"
#include "delay.h"uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;uint32_t H1=0; //Humility
uint32_t T1=0; //Temperatureuint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};void IIC_Init(void)
{ GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE ); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //ÍÆÍìÊä³öGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);IIC_SCL=1;IIC_SDA=1;}
//²úÉúIICÆðʼÐźÅ
void IIC_Start(void)
{SDA_OUT(); //sdaÏßÊä³öIIC_SDA=1; IIC_SCL=1;delay_us(4);IIC_SDA=0;//START:when CLK is high,DATA change form high to low delay_us(4);IIC_SCL=0;//ǯסI2C×ÜÏߣ¬×¼±¸·¢ËÍ»ò½ÓÊÕÊý¾Ý
}
//²úÉúIICÍ£Ö¹ÐźÅ
void IIC_Stop(void)
{SDA_OUT();//sdaÏßÊä³öIIC_SCL=0;IIC_SDA=0;//STOP:when CLK is high DATA change form low to highdelay_us(4);IIC_SCL=1; IIC_SDA=1;//·¢ËÍI2C×ÜÏß½áÊøÐźÅdelay_us(4);
}
//µÈ´ýÓ¦´ðÐźŵ½À´
//·µ»ØÖµ£º1£¬½ÓÊÕÓ¦´ðʧ°Ü
// 0£¬½ÓÊÕÓ¦´ð³É¹¦
u8 IIC_Wait_Ack(void)
{u8 ucErrTime=0;SDA_IN(); //SDAÉèÖÃΪÊäÈë IIC_SDA=1;delay_us(1); IIC_SCL=1;delay_us(1); while(READ_SDA){ucErrTime++;if(ucErrTime>250){IIC_Stop();return 1;}}IIC_SCL=0;//ʱÖÓÊä³ö0 return 0;
}
//²úÉúACKÓ¦´ð
void IIC_Ack(void)
{IIC_SCL=0;SDA_OUT();IIC_SDA=0;delay_us(2);IIC_SCL=1;delay_us(2);IIC_SCL=0;
}
//²»²úÉúACKÓ¦´ð
void IIC_NAck(void)
{IIC_SCL=0;SDA_OUT();IIC_SDA=1;delay_us(2);IIC_SCL=1;delay_us(2);IIC_SCL=0;
}
//IIC·¢ËÍÒ»¸ö×Ö½Ú
//·µ»Ø´Ó»úÓÐÎÞÓ¦´ð
//1£¬ÓÐÓ¦´ð
//0£¬ÎÞÓ¦´ð
void IIC_Send_Byte(u8 txd)
{ u8 t; SDA_OUT(); IIC_SCL=0;//ÀµÍʱÖÓ¿ªÊ¼Êý¾Ý´«Êäfor(t=0;t<8;t++){ IIC_SDA=(txd&0x80)>>7;txd<<=1; delay_us(2); //¶ÔTEA5767ÕâÈý¸öÑÓʱ¶¼ÊDZØÐëµÄIIC_SCL=1;delay_us(2); IIC_SCL=0; delay_us(2);}
}
//¶Á1¸ö×Ö½Ú£¬ack=1ʱ£¬·¢ËÍACK£¬ack=0£¬·¢ËÍnACK
u8 IIC_Read_Byte(unsigned char ack)
{unsigned char i,receive=0;SDA_IN();//SDAÉèÖÃΪÊäÈëfor(i=0;i<8;i++ ){IIC_SCL=0; delay_us(2);IIC_SCL=1;receive<<=1;if(READ_SDA)receive++; delay_us(1); } if (!ack)IIC_NAck();//·¢ËÍnACKelseIIC_Ack(); //·¢ËÍACK return receive;
}void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{IIC_Start(); if(device_addr==0xA0) //eepromµØÖ·´óÓÚ1×Ö½ÚIIC_Send_Byte(0xA0 + ((addr/256)<<1));//·¢Ë͸ߵØÖ·elseIIC_Send_Byte(device_addr); //·¢Æ÷¼þµØÖ·IIC_Wait_Ack(); IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·IIC_Wait_Ack(); IIC_Send_Byte(data); //·¢ËÍ×Ö½Ú IIC_Wait_Ack(); IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ if(device_addr==0xA0) //delay_ms(10);elsedelay_us(2);
}uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead) //¶Á¼Ä´æÆ÷»ò¶ÁÊý¾Ý
{ uint16_t data;IIC_Start(); if(device_addr==0xA0)IIC_Send_Byte(0xA0 + ((addr/256)<<1));elseIIC_Send_Byte(device_addr); IIC_Wait_Ack();IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·IIC_Wait_Ack(); IIC_Start(); IIC_Send_Byte(device_addr+1); //·¢Æ÷¼þµØÖ·IIC_Wait_Ack();if(ByteNumToRead == 1)//LM75ζÈÊý¾ÝΪ11bit{data=IIC_Read_Byte(0);}else{data=IIC_Read_Byte(1);data=(data<<8)+IIC_Read_Byte(0);}IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ return data;
}void read_AHT20_once(void)
{delay_ms(10);reset_AHT20();delay_ms(10);init_AHT20();delay_ms(10);startMeasure_AHT20();delay_ms(80);read_AHT20();delay_ms(5);
}void reset_AHT20(void)
{I2C_Start();I2C_WriteByte(0x70);ack_status = Receive_ACK();if(ack_status) ;else printf("1-n-");I2C_WriteByte(0xBA);ack_status = Receive_ACK();if(ack_status) ;else printf("2-n-");I2C_Stop();/*AHT20_OutData[0] = 0;AHT20_OutData[1] = 0;AHT20_OutData[2] = 0;AHT20_OutData[3] = 0;*/
}void init_AHT20(void)
{I2C_Start();I2C_WriteByte(0x70);ack_status = Receive_ACK();if(ack_status) ;else printf("3-n-"); I2C_WriteByte(0xE1);ack_status = Receive_ACK();if(ack_status) ;else printf("4-n-");I2C_WriteByte(0x08);ack_status = Receive_ACK();if(ack_status) ;else printf("5-n-");I2C_WriteByte(0x00);ack_status = Receive_ACK();if(ack_status) ;else printf("6-n-");I2C_Stop();
}void startMeasure_AHT20(void)
{//------------I2C_Start();I2C_WriteByte(0x70);ack_status = Receive_ACK();if(ack_status);else printf("7-n-");I2C_WriteByte(0xAC);ack_status = Receive_ACK();if(ack_status) ;else printf("8-n-");I2C_WriteByte(0x33);ack_status = Receive_ACK();if(ack_status);else printf("9-n-");I2C_WriteByte(0x00);ack_status = Receive_ACK();if(ack_status) ;else printf("10-n-");I2C_Stop();
}void read_AHT20(void)
{uint8_t i;for(i=0; i<6; i++){readByte[i]=0;}//-------------I2C_Start();I2C_WriteByte(0x71);ack_status = Receive_ACK();readByte[0]= I2C_ReadByte();Send_ACK();readByte[1]= I2C_ReadByte();Send_ACK();readByte[2]= I2C_ReadByte();Send_ACK();readByte[3]= I2C_ReadByte();Send_ACK();readByte[4]= I2C_ReadByte();Send_ACK();readByte[5]= I2C_ReadByte();SendNot_Ack();//Send_ACK();I2C_Stop();//--------------if( (readByte[0] & 0x68) == 0x08 ){H1 = readByte[1];H1 = (H1<<8) | readByte[2];H1 = (H1<<8) | readByte[3];H1 = H1>>4;H1 = (H1*1000)/1024/1024;T1 = readByte[3];T1 = T1 & 0x0000000F;T1 = (T1<<8) | readByte[4];T1 = (T1<<8) | readByte[5];T1 = (T1*2000)/1024/1024 - 500;AHT20_OutData[0] = (H1>>8) & 0x000000FF;AHT20_OutData[1] = H1 & 0x000000FF;AHT20_OutData[2] = (T1>>8) & 0x000000FF;AHT20_OutData[3] = T1 & 0x000000FF;}else{AHT20_OutData[0] = 0xFF;AHT20_OutData[1] = 0xFF;AHT20_OutData[2] = 0xFF;AHT20_OutData[3] = 0xFF;printf("ʧ°ÜÁË");}printf("\r\n");printf("ζÈ:%d.%d",T1/10,T1%10);printf("ʪ¶È:%d.%d",H1/10,H1%10);printf("\r\n");
}uint8_t Receive_ACK(void)
{uint8_t result=0;uint8_t cnt=0;IIC_SCL = 0;SDA_IN(); delay_us(4);IIC_SCL = 1;delay_us(4);while(READ_SDA && (cnt<100)){cnt++;}IIC_SCL = 0;delay_us(4);if(cnt<100){result=1;}return result;
}void Send_ACK(void)
{SDA_OUT();IIC_SCL = 0;delay_us(4);IIC_SDA = 0;delay_us(4);IIC_SCL = 1;delay_us(4);IIC_SCL = 0;delay_us(4);SDA_IN();
}void SendNot_Ack(void)
{SDA_OUT();IIC_SCL = 0;delay_us(4);IIC_SDA = 1;delay_us(4);IIC_SCL = 1;delay_us(4);IIC_SCL = 0;delay_us(4);IIC_SDA = 0;delay_us(4);
}void I2C_WriteByte(uint8_t input)
{uint8_t i;SDA_OUT();for(i=0; i<8; i++){IIC_SCL = 0;delay_ms(5);if(input & 0x80){IIC_SDA = 1;//delaymm(10);}else{IIC_SDA = 0;//delaymm(10);}IIC_SCL = 1;delay_ms(5);input = (input<<1);}IIC_SCL = 0;delay_us(4);SDA_IN();delay_us(4);
} uint8_t I2C_ReadByte(void)
{uint8_t resultByte=0;uint8_t i=0, a=0;IIC_SCL = 0;SDA_IN();delay_ms(4);for(i=0; i<8; i++){IIC_SCL = 1;delay_ms(3);a=0;if(READ_SDA){a=1;}else{a=0;}//resultByte = resultByte | a;resultByte = (resultByte << 1) | a;IIC_SCL = 0;delay_ms(3);}SDA_IN();delay_ms(10);return resultByte;
}void set_AHT20sendOutData(void)
{/* --------------------------* 0xFA 0x06 0x0A temperature(2 Bytes) humility(2Bytes) short Address(2 Bytes)* And Check (1 byte)* -------------------------*/AHT20sendOutData[3] = AHT20_OutData[0];AHT20sendOutData[4] = AHT20_OutData[1];AHT20sendOutData[5] = AHT20_OutData[2];AHT20sendOutData[6] = AHT20_OutData[3];// AHT20sendOutData[7] = (drf1609.shortAddress >> 8) & 0x00FF;
// AHT20sendOutData[8] = drf1609.shortAddress & 0x00FF;// AHT20sendOutData[9] = getXY(AHT20sendOutData,10);
}void I2C_Start(void)
{SDA_OUT();IIC_SCL = 1;delay_ms(4);IIC_SDA = 1;delay_ms(4);IIC_SDA = 0;delay_ms(4);IIC_SCL = 0;delay_ms(4);
}void I2C_Stop(void)
{SDA_OUT();IIC_SDA = 0;delay_ms(4);IIC_SCL = 1;delay_ms(4);IIC_SDA = 1;delay_ms(4);
}delay.c:
#include "delay.h"
#include "sys.h"//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********///
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
// //STM32¿ª·¢°å
//ʹÓÃSysTickµÄÆÕͨ¼ÆÊýģʽ¶ÔÑÓ³Ù½øÐйÜÀí
//°üÀ¨delay_us,delay_ms//
static u8 fac_us=0;//usÑÓʱ±¶³ËÊý
static u16 fac_ms=0;//msÑÓʱ±¶³ËÊý
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
//systickÖжϷþÎñº¯Êý,ʹÓÃucosʱÓõ½
void SysTick_Handler(void)
{ OSIntEnter(); //½øÈëÖжÏOSTimeTick(); //µ÷ÓÃucosµÄʱÖÓ·þÎñ³ÌÐò OSIntExit(); //´¥·¢ÈÎÎñÇл»ÈíÖжÏ
}
#endif//³õʼ»¯ÑÓ³Ùº¯Êý
//µ±Ê¹ÓÃucosµÄʱºò,´Ëº¯Êý»á³õʼ»¯ucosµÄʱÖÓ½ÚÅÄ
//SYSTICKµÄʱÖӹ̶¨ÎªHCLKʱÖÓµÄ1/8
//SYSCLK:ϵͳʱÖÓ
void delay_init()
{#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.u32 reload;
#endifSysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //Ñ¡ÔñÍⲿʱÖÓ HCLK/8fac_us=SystemCoreClock/8000000; //ΪϵͳʱÖÓµÄ1/8 #ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.reload=SystemCoreClock/8000000; //ÿÃëÖӵļÆÊý´ÎÊý µ¥Î»ÎªK reload*=1000000/OS_TICKS_PER_SEC;//¸ù¾ÝOS_TICKS_PER_SECÉ趨Òç³öʱ¼ä//reloadΪ24λ¼Ä´æÆ÷,×î´óÖµ:16777216,ÔÚ72MÏÂ,Ô¼ºÏ1.86s×óÓÒ fac_ms=1000/OS_TICKS_PER_SEC;//´ú±íucos¿ÉÒÔÑÓʱµÄ×îÉÙµ¥Î» SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //¿ªÆôSYSTICKÖжÏSysTick->LOAD=reload; //ÿ1/OS_TICKS_PER_SECÃëÖжÏÒ»´Î SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //¿ªÆôSYSTICK
#elsefac_ms=(u16)fac_us*1000;//·ÇucosÏÂ,´ú±íÿ¸ömsÐèÒªµÄsystickʱÖÓÊý
#endif
} #ifdef OS_CRITICAL_METHOD //ʹÓÃÁËucos
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{ u32 ticks;u32 told,tnow,tcnt=0;u32 reload=SysTick->LOAD; //LOADµÄÖµ ticks=nus*fac_us; //ÐèÒªµÄ½ÚÅÄÊý tcnt=0;told=SysTick->VAL; //¸Õ½øÈëʱµÄ¼ÆÊýÆ÷Öµwhile(1){tnow=SysTick->VAL; if(tnow!=told){ if(tnow<told)tcnt+=told-tnow;//ÕâÀï×¢ÒâÒ»ÏÂSYSTICKÊÇÒ»¸öµÝ¼õµÄ¼ÆÊýÆ÷¾Í¿ÉÒÔÁË.else tcnt+=reload-tnow+told; told=tnow;if(tcnt>=ticks)break;//ʱ¼ä³¬¹ý/µÈÓÚÒªÑÓ³ÙµÄʱ¼ä,ÔòÍ˳ö.} };
}
//ÑÓʱnms
//nms:ÒªÑÓʱµÄmsÊý
void delay_ms(u16 nms)
{ if(OSRunning==TRUE)//Èç¹ûosÒѾÔÚÅÜÁË { if(nms>=fac_ms)//ÑÓʱµÄʱ¼ä´óÓÚucosµÄ×îÉÙʱ¼äÖÜÆÚ {OSTimeDly(nms/fac_ms);//ucosÑÓʱ}nms%=fac_ms; //ucosÒѾÎÞ·¨ÌṩÕâôСµÄÑÓʱÁË,²ÉÓÃÆÕͨ·½Ê½ÑÓʱ }delay_us((u32)(nms*1000)); //ÆÕͨ·½Ê½ÑÓʱ,´ËʱucosÎÞ·¨Æô¶¯µ÷¶È.
}
#else//²»ÓÃucosʱ
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{ u32 temp; SysTick->LOAD=nus*fac_us; //ʱ¼ä¼ÓÔØ SysTick->VAL=0x00; //Çå¿Õ¼ÆÊýÆ÷SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý do{temp=SysTick->CTRL;}while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}void delay_ms(u16 nms)
{ u32 temp; SysTick->LOAD=(u32)nms*fac_ms;//ʱ¼ä¼ÓÔØ(SysTick->LOADΪ24bit)SysTick->VAL =0x00; //Çå¿Õ¼ÆÊýÆ÷SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý do{temp=SysTick->CTRL;}while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}
#endif
sys.c:
#include "sys.h"void NVIC_Configuration(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //ÉèÖÃNVICÖжϷÖ×é2:2λÇÀÕ¼ÓÅÏȼ¶£¬2λÏìÓ¦ÓÅÏȼ¶}
usart.c:
#include "sys.h"
#include "usart.h"//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********///
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
//
//STM32¿ª·¢°å
//´®¿Ú1³õʼ»¯ // //
//¼ÓÈëÒÔÏ´úÂë,Ö§³Öprintfº¯Êý,¶ø²»ÐèҪѡÔñuse MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//±ê×¼¿âÐèÒªµÄÖ§³Öº¯Êý
struct __FILE
{ int handle; }; FILE __stdout;
//¶¨Òå_sys_exit()ÒÔ±ÜÃâʹÓðëÖ÷»úģʽ
void _sys_exit(int x)
{ x = x;
}
//Öض¨Òåfputcº¯Êý
int fputc(int ch, FILE *f)
{ while((USART1->SR&0X40)==0);//Ñ»··¢ËÍ,Ö±µ½·¢ËÍÍê±Ï USART1->DR = (u8) ch; return ch;
}
#endif #if EN_USART1_RX //Èç¹ûʹÄÜÁ˽ÓÊÕ
//´®¿Ú1ÖжϷþÎñ³ÌÐò
//×¢Òâ,¶ÁÈ¡USARTx->SRÄܱÜÃâĪÃûÆäÃîµÄ´íÎó
u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.u16 USART_RX_STA=0; //½ÓÊÕ״̬±ê¼Ç void uart_init(u32 bound){//GPIO¶Ë¿ÚÉèÖÃGPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ʹÄÜUSART1£¬GPIOAʱÖÓ//USART1_TX PA.9GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³öGPIO_Init(GPIOA, &GPIO_InitStructure);//USART1_RX PA.10GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈëGPIO_Init(GPIOA, &GPIO_InitStructure); //Usart1 NVIC ÅäÖÃNVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//ÇÀÕ¼ÓÅÏȼ¶3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //×ÓÓÅÏȼ¶3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜNVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷//USART ³õʼ»¯ÉèÖÃUSART_InitStructure.USART_BaudRate = bound;//Ò»°ãÉèÖÃΪ9600;USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×Ö³¤Îª8λÊý¾Ý¸ñʽUSART_InitStructure.USART_StopBits = USART_StopBits_1;//Ò»¸öֹͣλUSART_InitStructure.USART_Parity = USART_Parity_No;//ÎÞÆæżУÑéλUSART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆUSART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ÊÕ·¢Ä£Ê½USART_Init(USART1, &USART_InitStructure); //³õʼ»¯´®¿ÚUSART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏUSART_Cmd(USART1, ENABLE); //ʹÄÜ´®¿Ú }void USART1_IRQHandler(void) //´®¿Ú1ÖжϷþÎñ³ÌÐò{u8 Res;
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.OSIntEnter();
#endifif(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //½ÓÊÕÖжÏ(½ÓÊÕµ½µÄÊý¾Ý±ØÐëÊÇ0x0d 0x0a½áβ){Res =USART_ReceiveData(USART1);//(USART1->DR); //¶ÁÈ¡½ÓÊÕµ½µÄÊý¾Ýif((USART_RX_STA&0x8000)==0)//½ÓÊÕδÍê³É{if(USART_RX_STA&0x4000)//½ÓÊÕµ½ÁË0x0d{if(Res!=0x0a)USART_RX_STA=0;//½ÓÊÕ´íÎó,ÖØпªÊ¼else USART_RX_STA|=0x8000; //½ÓÊÕÍê³ÉÁË }else //»¹Ã»ÊÕµ½0X0D{ if(Res==0x0d)USART_RX_STA|=0x4000;else{USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;USART_RX_STA++;if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//½ÓÊÕÊý¾Ý´íÎó,ÖØпªÊ¼½ÓÊÕ } }} }
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.OSIntExit();
#endif
}
#endif
结果

对传感器哈气可以看到温度和湿度在变化
这篇关于实验2——基于I2C的温湿度采集的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









