本文主要是介绍即插即用模块详解SCConv:用于特征冗余的空间和通道重构卷积,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、摘要
二、创新点说明
2.1 Methodology
2.2SRU for Spatial Redundancy编辑
2.3CRU for Channel Redundancy
三、实验
3.1基于CIFAR的图像分类
3.2基于ImageNet的图像分类
3.3对象检测
四、代码详解
五、总结
论文:https://openaccess.thecvf.com/content/CVPR2023/papers/Li_SCConv_Spatial_and_Channel_Reconstruction_Convolution_for_Feature_Redundancy_CVPR_2023_paper.pdf
代码:GitHub - cheng-haha/ScConv: SCConv: Spatial and Channel Reconstruction Convolution for Feature Redundancy
一、摘要
卷积神经网络(cnn)在各种计算机视觉任务中取得了显著的性能,但这是以巨大的计算资源为代价的,部分原因是卷积层提取冗余特征。最近的作品要么压缩训练有素的大型模型,要么探索设计良好的轻量级模型。在本文中,我们尝试利用特征之间的空间和通道冗余来进行CNN压缩,并提出了一种高效的卷积模块,称为SCConv (spatial and channel reconstruction convolution),以减少冗余计算并促进代表性特征的学习。提出的SCConv由空间重构单元(SRU)和信道重构单元(CRU)两个单元组成。SRU采用分离重构的方法来抑制空间冗余,CRU采用分离变换融合的策略来减少信道冗余。此外,SCConv是一种即插即用的架构单元,可直接用于替代各种卷积神经网络中的标准卷积。实验结果表明,SCConv嵌入模型能够通过减少冗余特征来获得更好的性能,并且显著降低了复杂度和计算成本。
论文贡献总结:
1. 提出了一种空间重构单元SRU,该单元根据权重分离冗余特征并进行重构,以抑制空间维度上的冗余,增强特征的表征能力。
2. 我们提出了一种信道重构单元,称为CRU,它利用分裂变换和融合策略来减少信道维度的冗余以及计算成本和存储。
3.我们设计了一种名为SCConv的即插即用操作,将SRU和CRU以顺序的方式组合在一起,以取代标准卷积,用于在各种骨干cnn上操作。结果表明,SCConv可以大大节省计算负荷,同时提高模型在挑战性任务上的性能。
二、创新点说明
2.1 Methodology

SCConv,它由两个单元组成,空间重建单元(SRU)和通道重建单元(CRU),以顺序的方式放置。具体而言,对于瓶颈残差块中的中间输入特征X,我们首先通过SRU运算获得空间细化特征Xw,然后利用CRU运算获得信道细化特征Y。我们在SCConv模块中利用了特征之间的空间冗余和通道冗余,可以无缝集成到任何CNN架构中,以减少中间特征映射之间的冗余并增强CNN的特征表示。
2.2SRU for Spatial Redundancy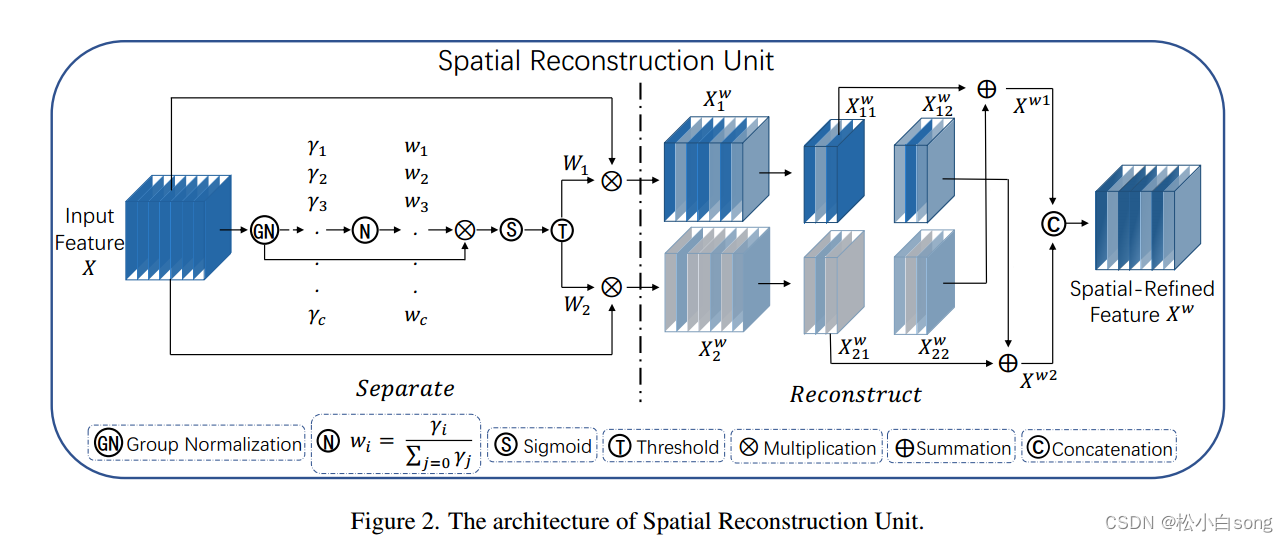
为了利用特征的空间冗余,我们引入了空间重构单元(SRU),如图2所示,它利用了分离和重构操作。分离操作的目的是将信息丰富的特征图与空间内容对应的信息较少的特征图分离开来。
2.3CRU for Channel Redundancy

为了利用特征的信道冗余,我们引入了信道重构单元(CRU),如图3所示,它利用了分裂-转换-融合策略。
三、实验
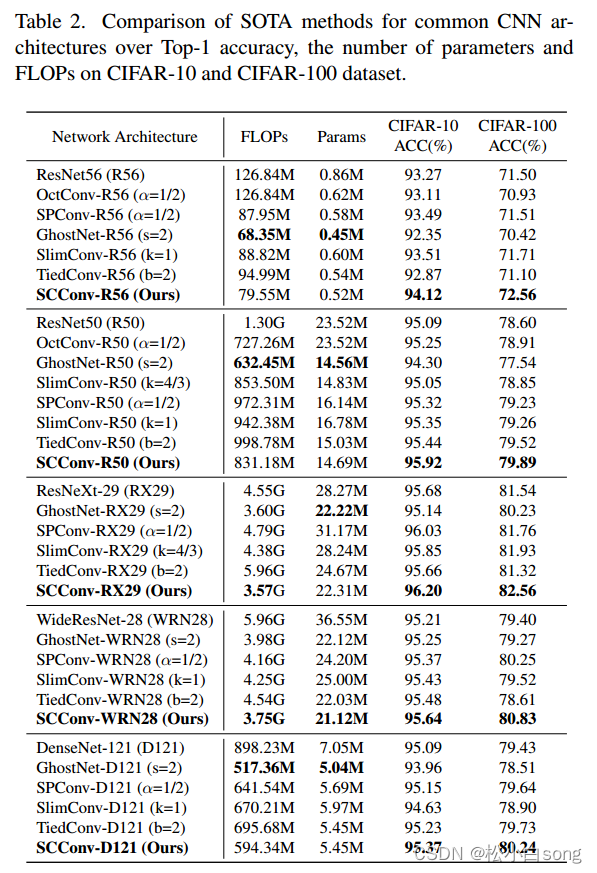
3.1基于CIFAR的图像分类
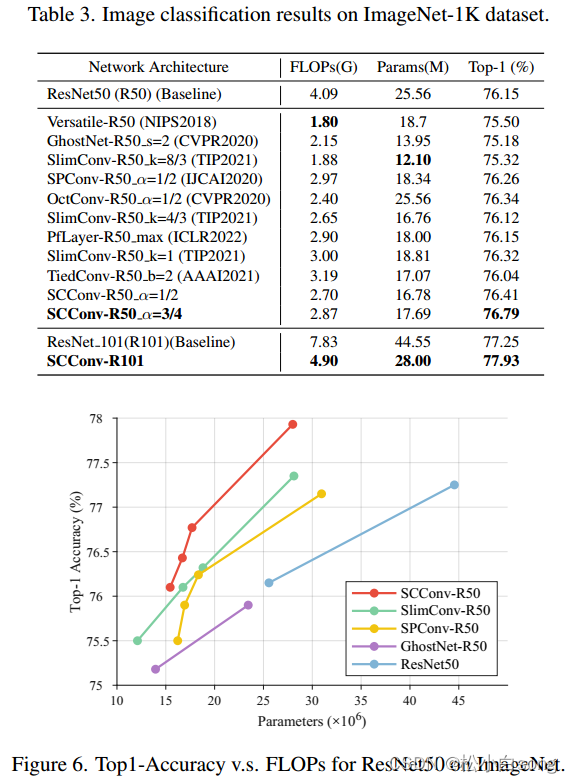
3.2基于ImageNet的图像分类
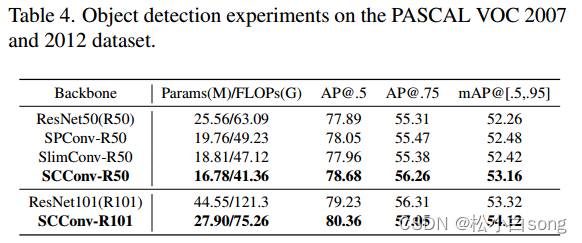
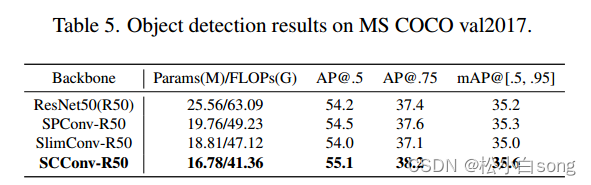
3.3对象检测
四、代码详解
import torch # 导入 PyTorch 库
import torch.nn.functional as F # 导入 PyTorch 的函数库
import torch.nn as nn # 导入 PyTorch 的神经网络模块# 自定义 GroupBatchnorm2d 类,实现分组批量归一化
class GroupBatchnorm2d(nn.Module):def __init__(self, c_num:int, group_num:int = 16, eps:float = 1e-10):super(GroupBatchnorm2d,self).__init__() # 调用父类构造函数assert c_num >= group_num # 断言 c_num 大于等于 group_numself.group_num = group_num # 设置分组数量self.gamma = nn.Parameter(torch.randn(c_num, 1, 1)) # 创建可训练参数 gammaself.beta = nn.Parameter(torch.zeros(c_num, 1, 1)) # 创建可训练参数 betaself.eps = eps # 设置小的常数 eps 用于稳定计算def forward(self, x):N, C, H, W = x.size() # 获取输入张量的尺寸x = x.view(N, self.group_num, -1) # 将输入张量重新排列为指定的形状mean = x.mean(dim=2, keepdim=True) # 计算每个组的均值std = x.std(dim=2, keepdim=True) # 计算每个组的标准差x = (x - mean) / (std + self.eps) # 应用批量归一化x = x.view(N, C, H, W) # 恢复原始形状return x * self.gamma + self.beta # 返回归一化后的张量# 自定义 SRU(Spatial and Reconstruct Unit)类
class SRU(nn.Module):def __init__(self,oup_channels:int, # 输出通道数group_num:int = 16, # 分组数,默认为16gate_treshold:float = 0.5, # 门控阈值,默认为0.5torch_gn:bool = False # 是否使用PyTorch内置的GroupNorm,默认为False):super().__init__() # 调用父类构造函数# 初始化 GroupNorm 层或自定义 GroupBatchnorm2d 层self.gn = nn.GroupNorm(num_channels=oup_channels, num_groups=group_num) if torch_gn else GroupBatchnorm2d(c_num=oup_channels, group_num=group_num)self.gate_treshold = gate_treshold # 设置门控阈值self.sigomid = nn.Sigmoid() # 创建 sigmoid 激活函数def forward(self, x):gn_x = self.gn(x) # 应用分组批量归一化w_gamma = self.gn.gamma / sum(self.gn.gamma) # 计算 gamma 权重reweights = self.sigomid(gn_x * w_gamma) # 计算重要性权重# 门控机制info_mask = reweights >= self.gate_treshold # 计算信息门控掩码noninfo_mask = reweights < self.gate_treshold # 计算非信息门控掩码x_1 = info_mask * x # 使用信息门控掩码x_2 = noninfo_mask * x # 使用非信息门控掩码x = self.reconstruct(x_1, x_2) # 重构特征return xdef reconstruct(self, x_1, x_2):x_11, x_12 = torch.split(x_1, x_1.size(1) // 2, dim=1) # 拆分特征为两部分x_21, x_22 = torch.split(x_2, x_2.size(1) // 2, dim=1) # 拆分特征为两部分return torch.cat([x_11 + x_22, x_12 + x_21], dim=1) # 重构特征并连接# 自定义 CRU(Channel Reduction Unit)类
class CRU(nn.Module):def __init__(self, op_channel:int, alpha:float = 1/2, squeeze_radio:int = 2, group_size:int = 2, group_kernel_size:int = 3):super().__init__() # 调用父类构造函数self.up_channel = up_channel = int(alpha * op_channel) # 计算上层通道数self.low_channel = low_channel = op_channel - up_channel # 计算下层通道数self.squeeze1 = nn.Conv2d(up_channel, up_channel // squeeze_radio, kernel_size=1, bias=False) # 创建卷积层self.squeeze2 = nn.Conv2d(low_channel, low_channel // squeeze_radio, kernel_size=1, bias=False) # 创建卷积层# 上层特征转换self.GWC = nn.Conv2d(up_channel // squeeze_radio, op_channel, kernel_size=group_kernel_size, stride=1, padding=group_kernel_size // 2, groups=group_size) # 创建卷积层self.PWC1 = nn.Conv2d(up_channel // squeeze_radio, op_channel, kernel_size=1, bias=False) # 创建卷积层# 下层特征转换self.PWC2 = nn.Conv2d(low_channel // squeeze_radio, op_channel - low_channel // squeeze_radio, kernel_size=1, bias=False) # 创建卷积层self.advavg = nn.AdaptiveAvgPool2d(1) # 创建自适应平均池化层def forward(self, x):# 分割输入特征up, low = torch.split(x, [self.up_channel, self.low_channel], dim=1)up, low = self.squeeze1(up), self.squeeze2(low)# 上层特征转换Y1 = self.GWC(up) + self.PWC1(up)# 下层特征转换Y2 = torch.cat([self.PWC2(low), low], dim=1)# 特征融合out = torch.cat([Y1, Y2], dim=1)out = F.softmax(self.advavg(out), dim=1) * outout1, out2 = torch.split(out, out.size(1) // 2, dim=1)return out1 + out2# 自定义 ScConv(Squeeze and Channel Reduction Convolution)模型
class ScConv(nn.Module):def __init__(self, op_channel:int, group_num:int = 16, gate_treshold:float = 0.5, alpha:float = 1/2, squeeze_radio:int = 2, group_size:int = 2, group_kernel_size:int = 3):super().__init__() # 调用父类构造函数self.SRU = SRU(op_channel, group_num=group_num, gate_treshold=gate_treshold) # 创建 SRU 层self.CRU = CRU(op_channel, alpha=alpha, squeeze_radio=squeeze_radio, group_size=group_size, group_kernel_size=group_kernel_size) # 创建 CRU 层def forward(self, x):x = self.SRU(x) # 应用 SRU 层x = self.CRU(x) # 应用 CRU 层return xif __name__ == '__main__':x = torch.randn(1, 32, 16, 16) # 创建随机输入张量model = ScConv(32) # 创建 ScConv 模型print(model(x).shape) # 打印模型输出的形状五、总结
在本文中,我们提出了一种新的空间和信道重构模块(SCConv),这是一种有效的架构单元,可以降低计算成本和模型存储,同时通过减少标准卷积中广泛存在的空间和信道冗余来提高CNN模型的性能。我们使用两个不同的模块SRU和CRU来减少特征映射中的冗余,在减少大量计算负载的同时实现了相当大的性能改进。此外,SCConv是一个即插即用的模块,可以替代标准的卷积,不需要任何模型架构的调整。此外,各种SOTA方法在图像分类和目标检测方面的大量实验表明,scconvn嵌入模型在性能和模型效率之间取得了更好的平衡。最后,我们希望所提出的方法可以启发研究更有效的建筑设计。
参考:大佬
这篇关于即插即用模块详解SCConv:用于特征冗余的空间和通道重构卷积的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







