本文主要是介绍OpenHarmony南向嵌入式:【XR806开发板指导文档】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一. 简介
芯片介绍
XR806是全志科技旗下子公司广州芯之联研发设计的一款支持WiFi和BLE的高集成度无线MCU芯片,支持OpenHarmony轻量设置系统。具有集成度高、硬件设计简单、BOM成本低、安全可靠等优点。可广泛满足 智能家居、智慧楼宇、工业互联、儿童玩具、电子竞赛、极客DIY等领域的无线连接需求。
开发板介绍
XR806_OpenHarmony开发板是基于XR806芯片设计开发的参考评估,板身集成了XR806芯片、WiFi/BT双天线、供电系统、按钮及LED等,并引出了所有可用引脚,可供开发者进行方案评估、DIY或小规模产品研发使用。以下为开发板外观图(更多硬件资料地址

二. 快速上手
1. 环境搭建
开发基础环境由windows 工作台和Linux编译服务器组成。windows 工作台可以通过samba 服务或ssh 方式访问Linux编译服务器。其中windows 工作台用来烧录和代码编辑,Linux编译服务器用来编译OpenHarmony代码,为了简化步骤,Linux编译服务器推荐安装Ubuntu20.04。

安装编译依赖基础软件
sudo apt-get install -y build-essential gcc g++ make zlib* libffi-dev安装和配置Python
-
打开Linux编译服务器终端。
-
输入如下命令,查看python版本号,需使用python3.7以上版本。
python3 --version如果低于python3.7版本,不建议直接升级,请按照如下步骤重新安装。以python3.8为例,按照以下步骤安装python。
-
运行如下命令,查看Ubuntu版本:
cat /etc/issue -
根据Ubuntu不同版本,安装python。
-
如果Ubuntu 版本为18+,运行如下命令。
sudo apt-get install python3.8 -
如果Ubuntu版本为16。
a. 安装依赖包
sudo apt update && sudo apt install software-properties-commonb. 添加deadsnakes PPA 源,然后按回车键确认安装。
sudo add-apt-repository ppa:deadsnakes/ppac. 安装python3.8
sudo apt upgrade && sudo apt install python3.8
-
-
-
设置python和python3软链接为python3.8。
sudo update-alternatives --install /usr/bin/python python /usr/bin/python3.8 1 sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.8 1 -
安装并升级Python包管理工具(pip3),任选如下一种方式。
-
命令行方式:
sudo apt-get install python3-setuptools python3-pip -y sudo pip3 install --upgrade pip -
安装包方式:
curl https://bootstrap.pypa.io/get-pip.py -o get-pip.py python get-pip.py
-
安装gn
-
打开Linux编译服务器终端。
-
在根目录下创建gn文件夹。
mkdir ~/gn -
解压gn安装包至~/gn路径下。
tar -xvf gn-linux-x86-1717.tar.gz -C ~/gn -
设置环境变量。
vim ~/.bashrc将以下命令拷贝到.bashrc文件的最后一行,保存并退出。
export PATH=~/gn:$PATH -
生效环境变量。
source ~/.bashrc安装ninja
-
打开Linux编译服务器终端。
-
解压ninja安装包至~/ninja路径下。
tar -xvf ninja.1.9.0.tar -C ~/ -
设置环境变量。
vim ~/.bashrc将以下命令拷贝到.bashrc文件的最后一行,保存并退出。
export PATH=~/ninja:$PATH -
生效环境变量。
source ~/.bashrc
安装工具链
-
编译链工具推荐gcc-arm-none-eabi-10-2020-q4-major。
-
将gcc-arm-none-eabi-10-2020-q4-major包解压到~/tools目录下
tar -zxvf gcc-arm-none-eabi-10-2020-q4-major.tar.gz -C ~/tools/
2. 获取源码
安装码云repo工具
cd ~/
curl https://gitee.com/oschina/repo/raw/fork_flow/repo-py3 > ./repo
chmod a+x ./repo
sudo mv ./repo /usr/local/bin/
pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple requests代码下载
- OpenHarmony代码下载,以OpenHarmony 3.1 Beta版本为例,下载方式如下:
mkdir ~/openharmony
cd ~/openharmonyrepo init -u git@gitee.com:openharmony/manifest.git -b refs/tags/OpenHarmony-v3.1-Beta --no-repo-verify
repo sync -c
repo forall -c 'git lfs pull'-
下载板级soc模块
soc下面是包含芯片SDK和驱动代码、第三方库适配等接口层代码。下载方法如下:
mkdir ~/xradio cd ~/xradio git clone git@gitee.com:openharmony-sig/device_soc_allwinner.git因为最新的代码未在适配相应的HDF驱动,所以需要将代码回退到指定版本:d5d336941a1ba1ba3b84aebab1d7173d20968ccd
cd device_soc_allwinner git reset --hard d5d336941a1ba1ba3b84aebab1d7173d20968ccd将此代码拷贝到soc下并重新命名为allwinner
cp -raf device_soc_allwinner ~/openharmony/device/soc/allwinner -
下载板级board模块
board主要存放板级配置,下载方法:
git clone git@gitee.com:openharmony-sig/device_board_allwinner.git将此代码拷贝到board下并重新命名为allwinner
cp -raf device_board_allwinner ~/openharmony/device/board/allwinner -
下载vendor模块
vendor存放的都是一些基于XRMCU开发的WiFi模组代码样例,下载方法:
git clone git@gitee.com:openharmony-sig/vendor_allwinner.git将此代码拷贝到vendor下并重新命名为allwinner
cp -raf vendor_allwinner_xr806 ~/openharmony/vendor/allwinner安装hb
cd ~/openharmony
pip3 install build/lite # 此语句需要在SDK根目录下执行。3. 编写自己的hello word
在vendor/allwinner/xradio_wifi_demo创建demo_hello_world文件夹
cd vendor/allwinner/xradio_wifi_demo/
mkdir demo_hello_world 然后创建hello_world.c 以及BUILD.gn
cd demo_hello_world
touch hello_world.c
touch BUILD.gn在hello_world.c中添加以下代码
#include <stdio.h>
#include <string.h>#include "ohos_init.h"int DemoMain(int argc, char **argv)
{printf("\r\nhello world!\r\n\r\n");return 0;
}SYS_RUN(DemoMain);在BUILD.gn中添加以下代码
source_set("hello_world"){sources = ["hello_world.c"]
}将helloworld添加到编译中,在 device/soc/allwinner/xradio/xr806/BUILD.gn中添加以下依赖:
module_group(module_name) {modules = ["src","project","include",]configs = [":SdkLdCconfig",]deps = [ "//vendor/allwinner/xradio_wifi_demo/demo_hello_world:hello_world" ]
}4. 编译
-
hb set 选择demo指令,具体命令如下:
hb set -root # 通过键盘选择 xradio_wifi_demo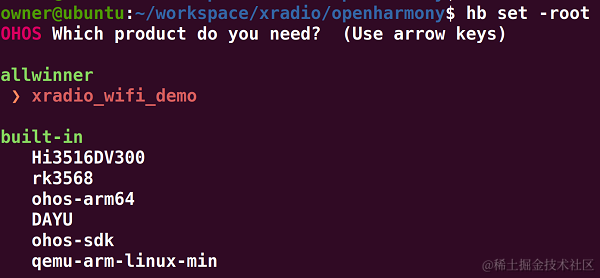
-
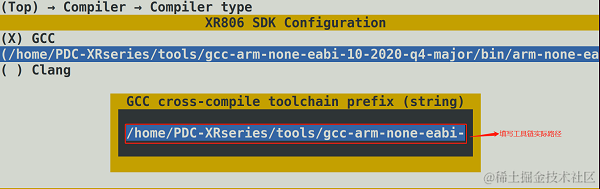
修改编译工具链地址
cd kernel/liteos_m make menuconfig然后选择Compiler->Compiler type(GCC),然后选择路径一行,按回车会弹出路径的输入框,此时输入实际的工具链地址。按ESC返回,最后退出并保存配置即可。

-
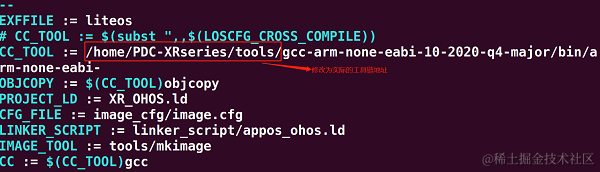
修改配置文件中的工具链路径
device/board/allwinner/xradio/liteos_m/config.gni

device/soc/allwinner/xradio/xr806/build/Makefile
-
hb build 全量编译命令
hb build -f如果编译中出现如下错误:

需要修改device/soc/allwinner/xradio/osal/include/target_config.h
// #define OS_SYS_CLOCK (SystemCoreClock)
#define OS_SYS_CLOCK 1600000005. 烧录 && 运行
- 固件和烧录软件位置
- 编译生成的固件保存在out/xradio/xradio_wifi_demo目录下,文件名固定为xr_system.img。
- 烧录软件保存在device/soc/allwinner/xradio/xr806/tools下,名称为phoenixMC_xxxx.exe。
-
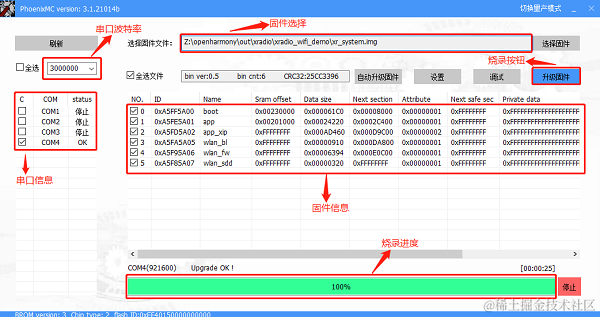
烧录软件界面
-
操作步骤
-
PC安装CP2102驱动。
-
串口连接:通过USB-typeC数据线连接开发板和PC。
-
串口设置:点击左上角的“刷新”按钮可刷新已连接串口设备列表,勾选开发板对应的COM口。串口波特率最大支持3000000,波特率越高,烧录速度越快。如果高波特率下容易出现烧录失败,可检查串口线、串口驱动是否稳定支持该波特率;或者降低波特率进行尝试。为了避免烧录速度过慢,建议波特率选择3000000。
-
固件选择:点击“选择固件”按钮选择需要烧录的固件文件(xr_system.img),固件信息栏会显示出当前固件的详细信息。另外,通过拖拽方式将固件直接拖入工具界面也可以达到同样的效果。
-
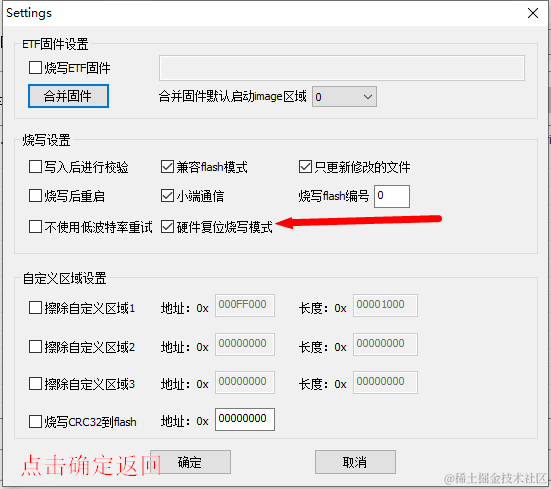
开启一键烧录功能:点击“设置”按钮调出设置界面,如下图勾选“硬件复位烧写模式”.
-
启动烧录:点击“升级固件”按钮启动固件烧录。烧录状态栏显示当前选定串口对应设备的烧录进度和状态。当烧录成功时,进度条会达到100%的进度并显示为绿色;当烧录失败时,进度条显示为红色并报告错误。
-
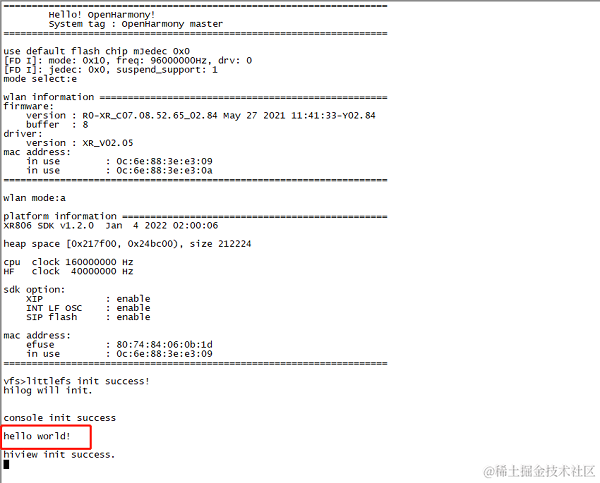
复位设备:固件烧录成功后,开启PC串口调试工具(115200,N,8,1),硬件复位开发板(按下复位按钮),程序将运行且看到以下打印输出。
鸿蒙Next核心技术分享
1、鸿蒙基础知识←《鸿蒙NEXT星河版开发学习文档》

2、鸿蒙ArkUI←《鸿蒙NEXT星河版开发学习文档》

3、鸿蒙进阶技术←《鸿蒙NEXT星河版开发学习文档》

4、鸿蒙就业高级技能←《鸿蒙NEXT星河版开发学习文档》

5、鸿蒙多媒体技术←《鸿蒙NEXT星河版开发学习文档》

6、鸿蒙南向驱动开发←《鸿蒙NEXT星河版开发学习文档》

7、鸿蒙南向内核设备开发←《鸿蒙NEXT星河版开发学习文档》

8、鸿蒙系统裁剪与移植←《鸿蒙NEXT星河版开发学习文档》
这篇关于OpenHarmony南向嵌入式:【XR806开发板指导文档】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






