本文主要是介绍用ansys q3d提取pcb板上的寄生参数及注意事项,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
需求
画好pcb板后,想要提取回路的寄生参数
1 保存为ad格式
因为之前图方便用立创eda画的板子,结果无法导出成想要的格式。因此需要将立创eda的文件导出为ad格式。立创eda的官网有相关教程。
注意事项(只说自己遇到的问题)
- 导出以后用ad打开,电源和地有两个很大的圆盘(不知道原因)。选中以后,找一下ad中的改变形状大小的选项,然后统统改为0就行了
- 有一个【填充(也就是铺铜)】的地方只有外面的轮廓(虚线),但没有铜。需要选中那个形状以后选择repour,即重建铺铜。因为两个软件中铺铜规则设置得不太一样,最后的结果也会有区别。如果比较重要的话,还是在ad中也修改一下规则,改成和立创eda一样
- 并不完全适配的,还是需要多检查一下有没有漏掉的/bug区域。关于有哪一些东西可能会无法导出,在官网中有提到。
2 用ad导出为ansys eda格式
有可能遇到的问题已经写了两篇文章了【Altium Designer】导出为ansys EDB时提示EDB datebase initialization error的问题
【Altium Designer】扩展程序中没有ansys EDB exporter/安装不了新的扩展程序的问题
3 用ansys slwave打开刚生成的edb文件
3.0 导入
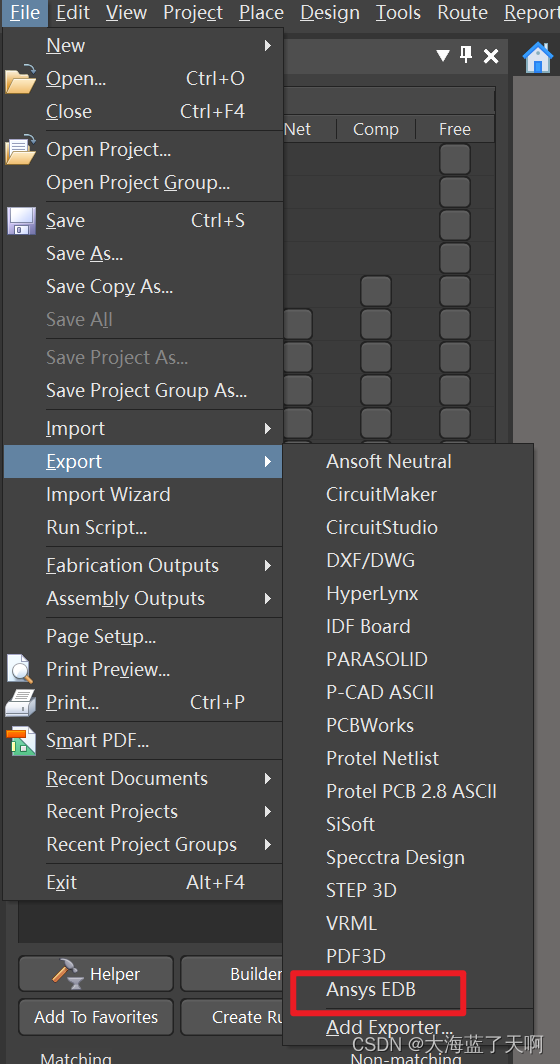
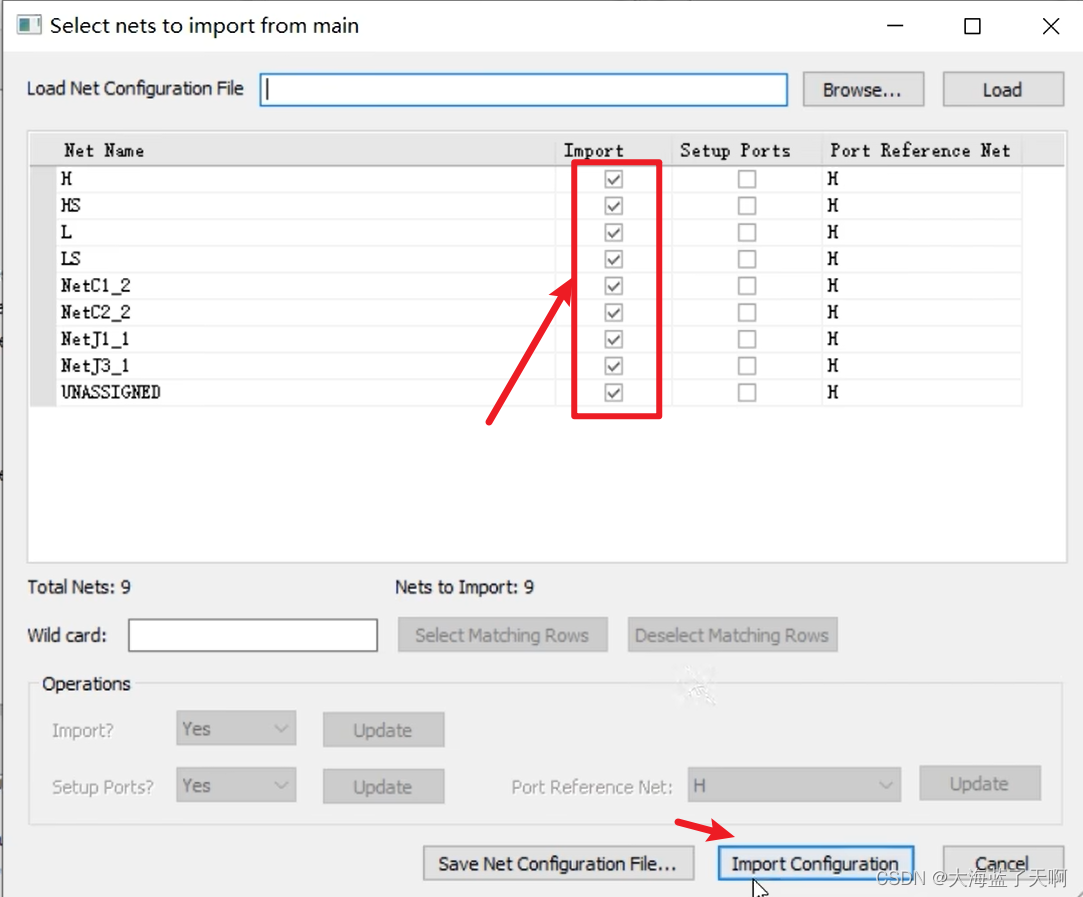
在导入页面选择ansys edb格式

全部勾选导入
3.1 保存
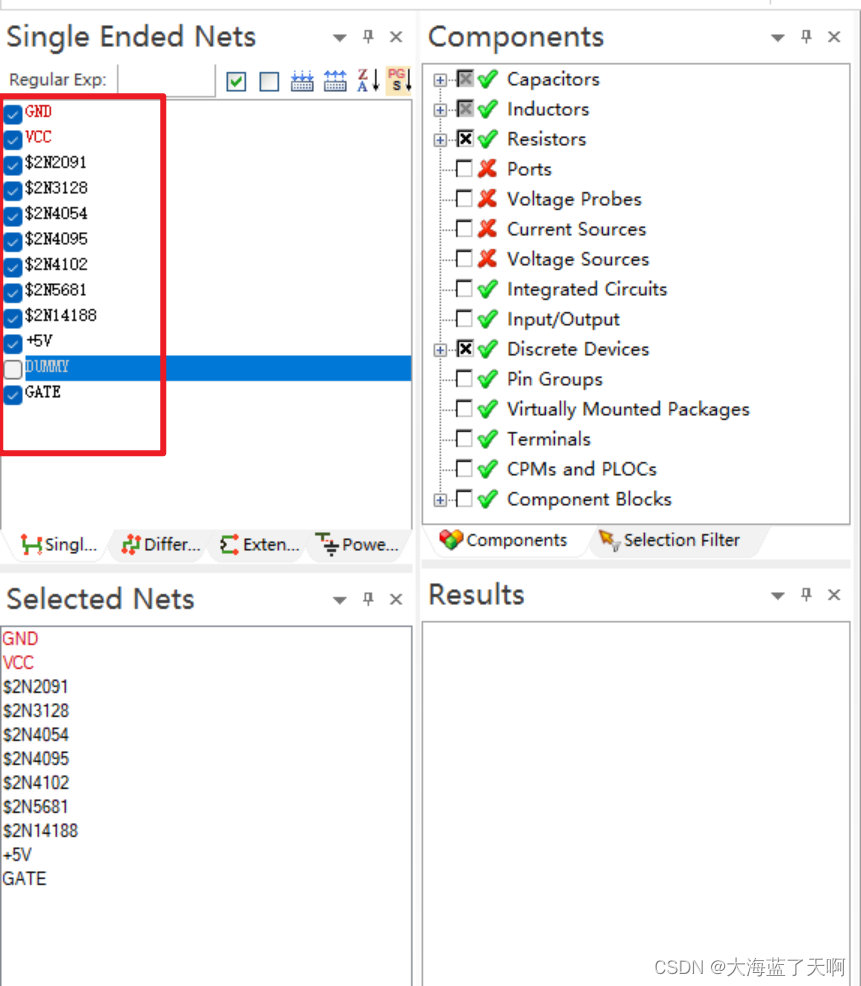
打开后,在左侧勾选所有的节点,ctrl+s保存。只有保存才能进行下一步
3.2 导出
保存后导出为q3d文件
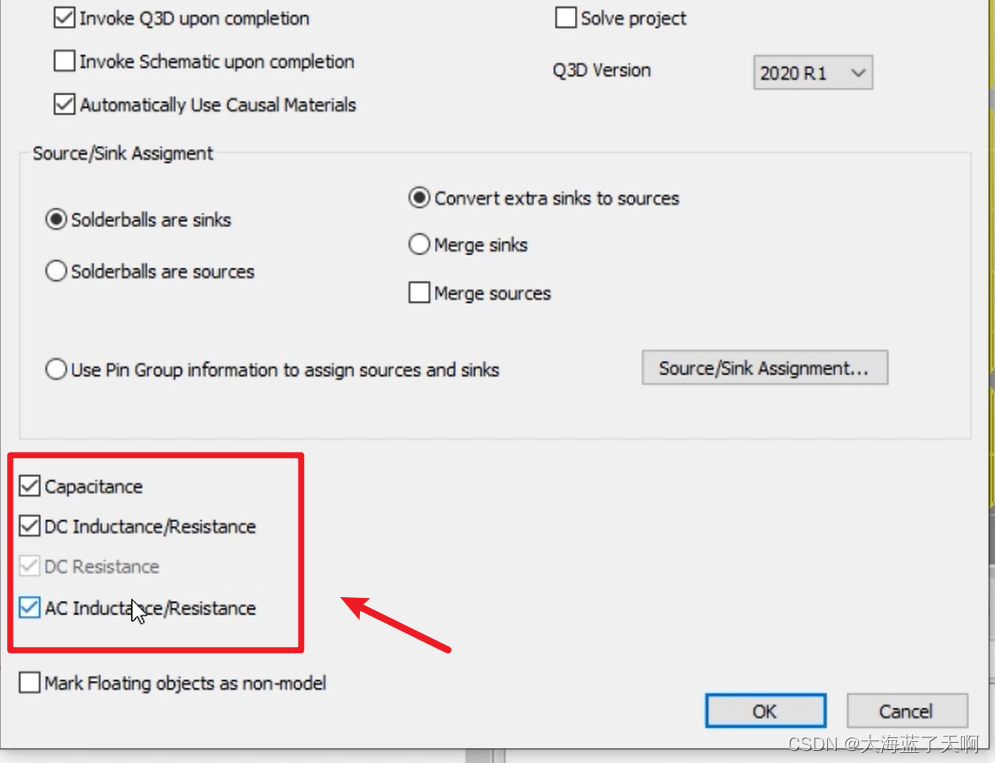
 把红框中的内容全部勾选
把红框中的内容全部勾选
注意事项
- 导入的时候选择.edb后缀的文件夹,而不是其他文件
- 遇到了一个节点无法导入的问题(图中的dummy),应该是因为这个节点是孤立节点,没有和其他节点形成连接。暂时没有找到解决办法
4 用ansys electronics desktop打开q3d文件
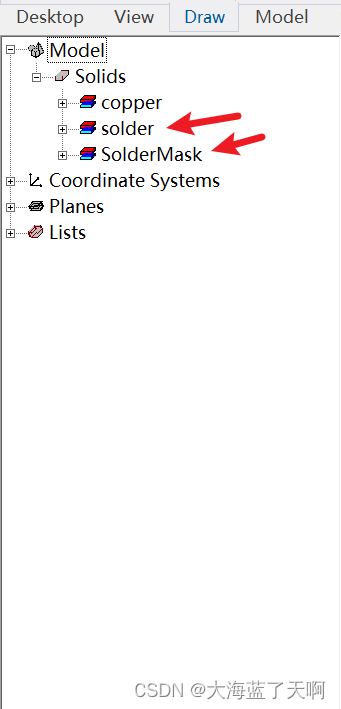
4.1 删除非铜层
用ansys electronics desktop打开刚刚导出的aedt文件,把solder(焊料层)和soldermask(阻焊层)两个折叠下面的所有信息删除。
4.2 形成回路
因为导入进来的只有铜和焊盘,没有电感等元器件,所以在放置元器件的地方放材料为copper(铜)的立方体,以形成回路(图中绿色部分)
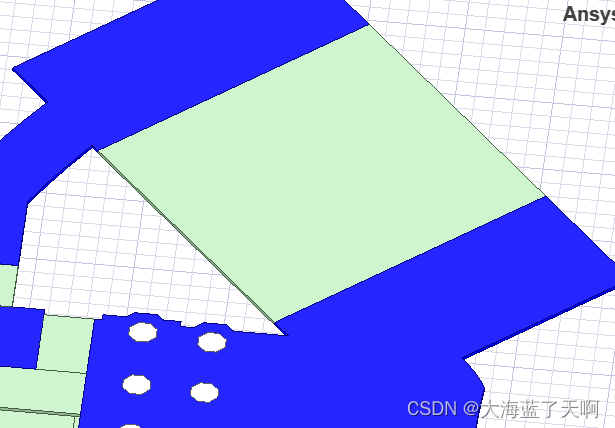
这里暂时没搞懂应该画多大的立方体,不知道大小会不会有很大的影响
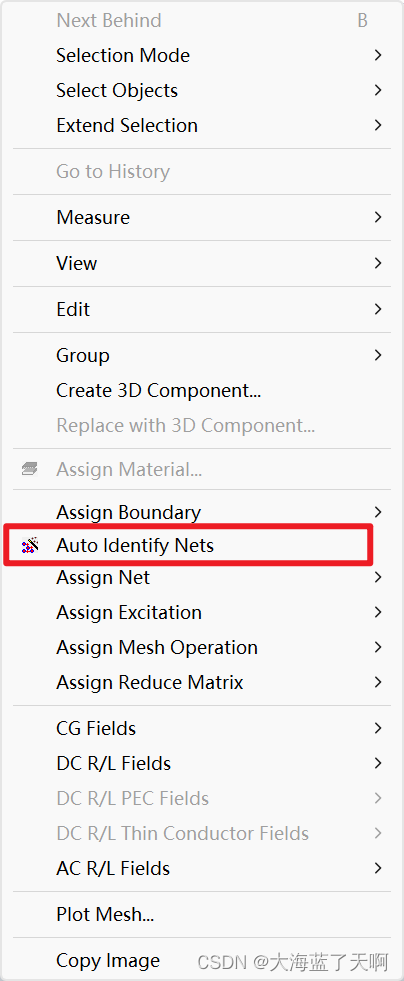
4.3 设置source和sink
接下来要设置能量的输入和输出部分,我的方法是在输入正极和地分别画一个小方块然后选择其【face】,右键分别设置为source和sink。这样子应该测出来的是整个回路的寄生电感
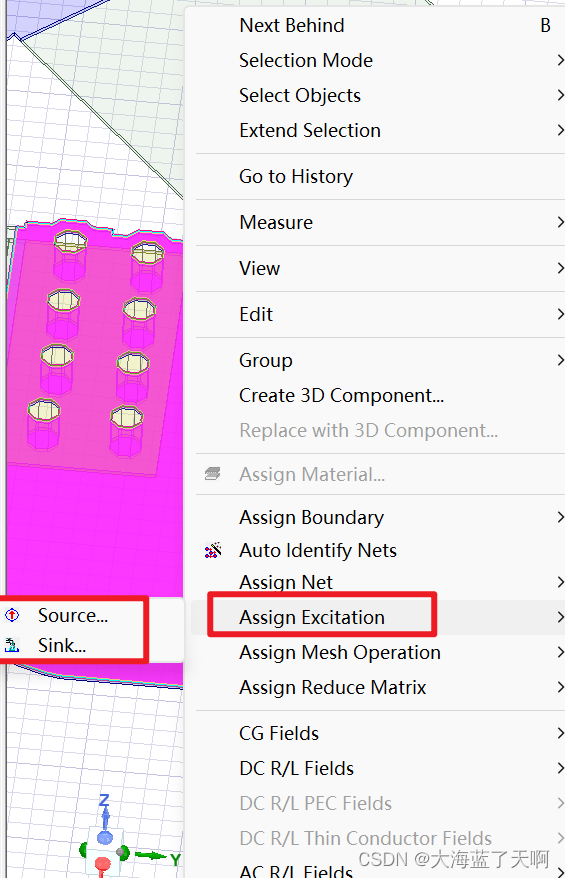
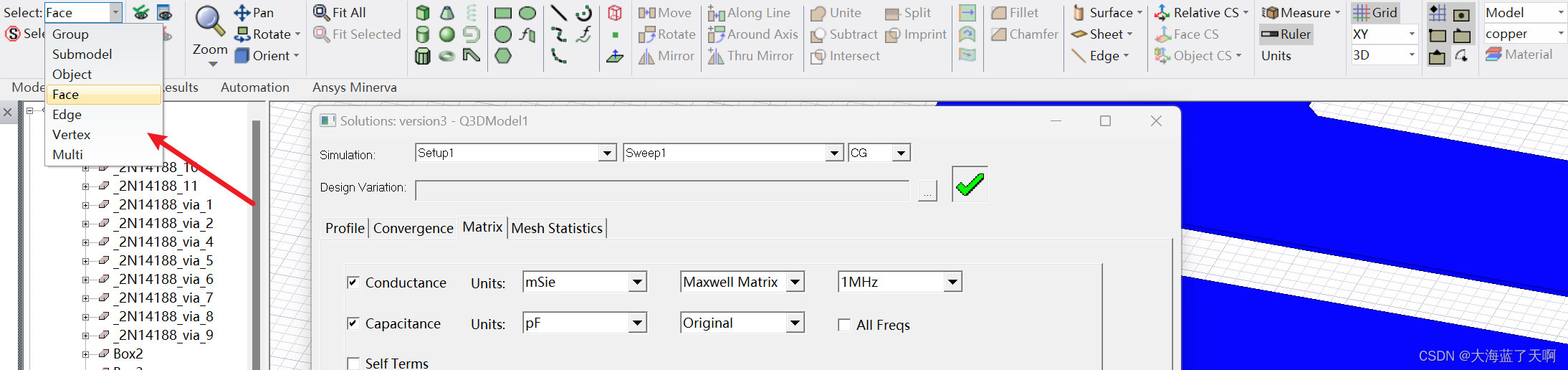
注意这里不能直接选择整个object
,而要选择face,在这里可以修改选中的类型
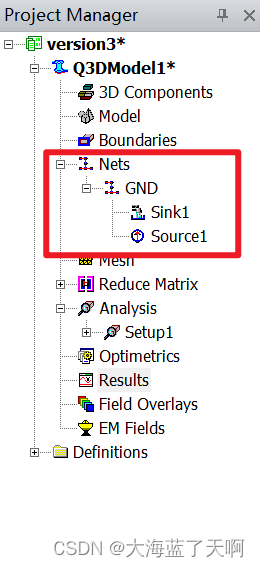
4.4 更新网表
画完之后,更新一下网表,理论上此时除了驱动外,所有的部分都合并为一个网络了
5 进行分析
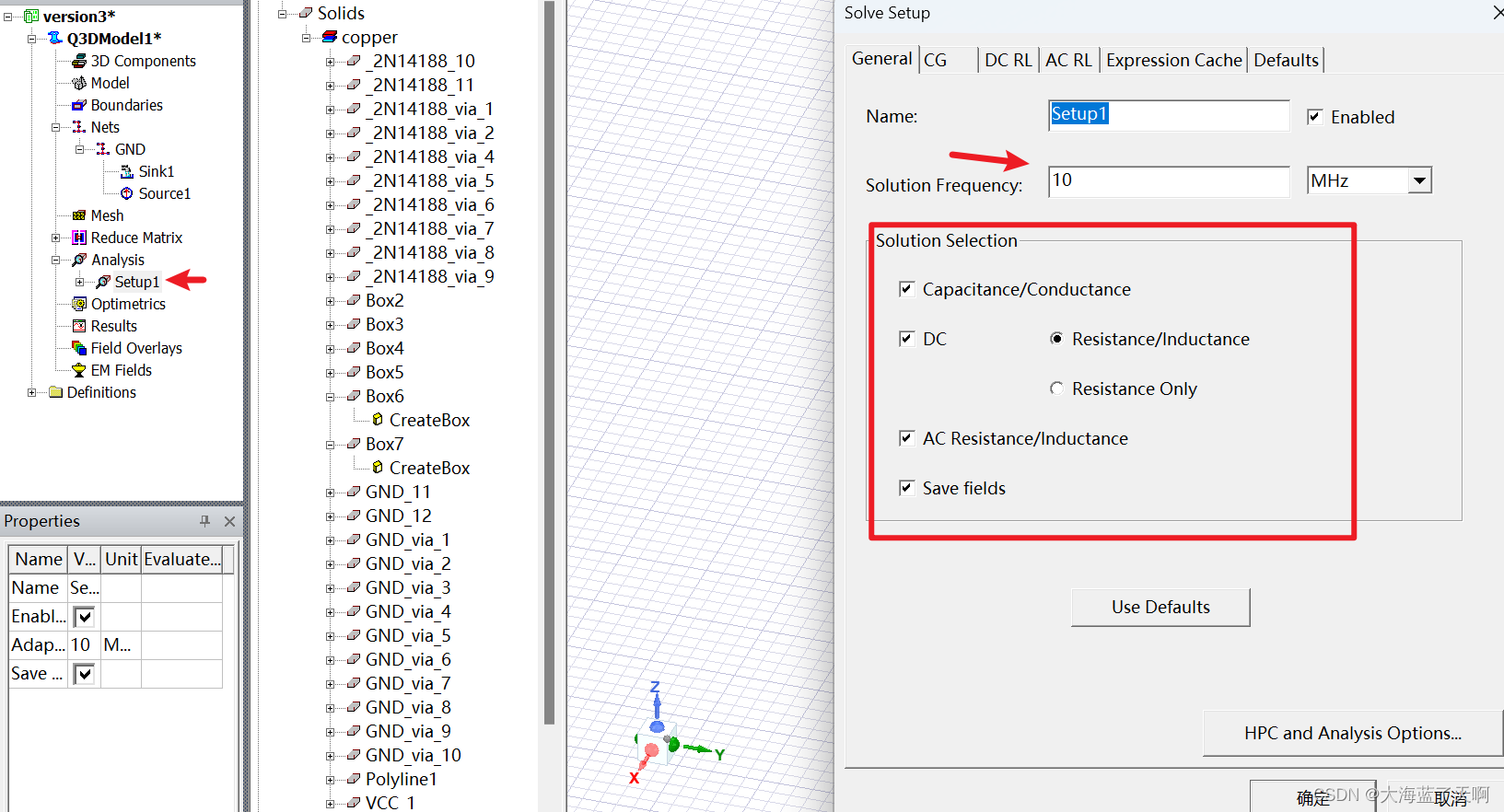
5.1 初始化设置
双击analysis的setup,在打开的页面中把这里的频率改成实际的工作频率。Solution selection全部勾选
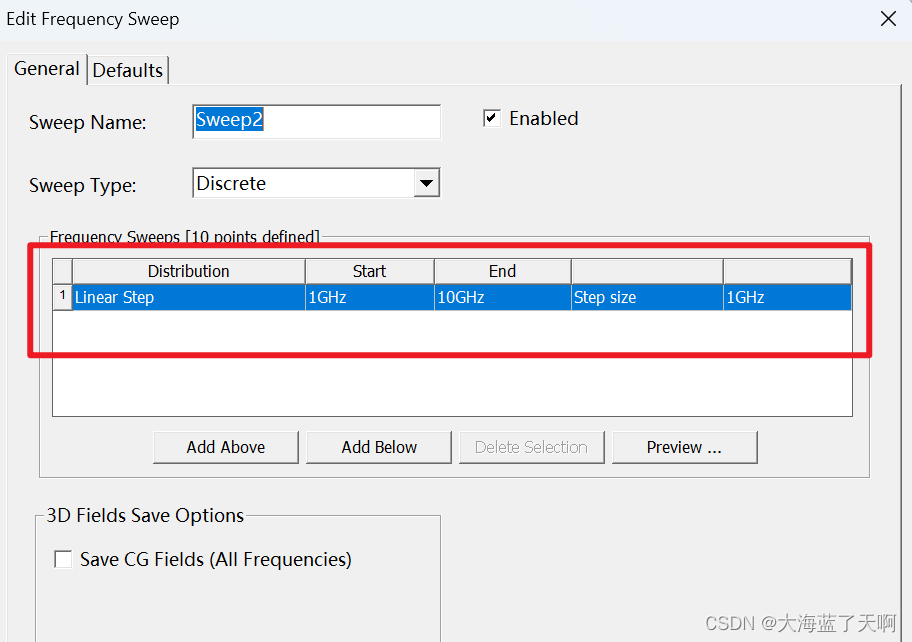
然后在setup上右键选择add frequency sweep,增加扫频的内容(不知道为什么这里要扫频,反正视频教程是这么说的)
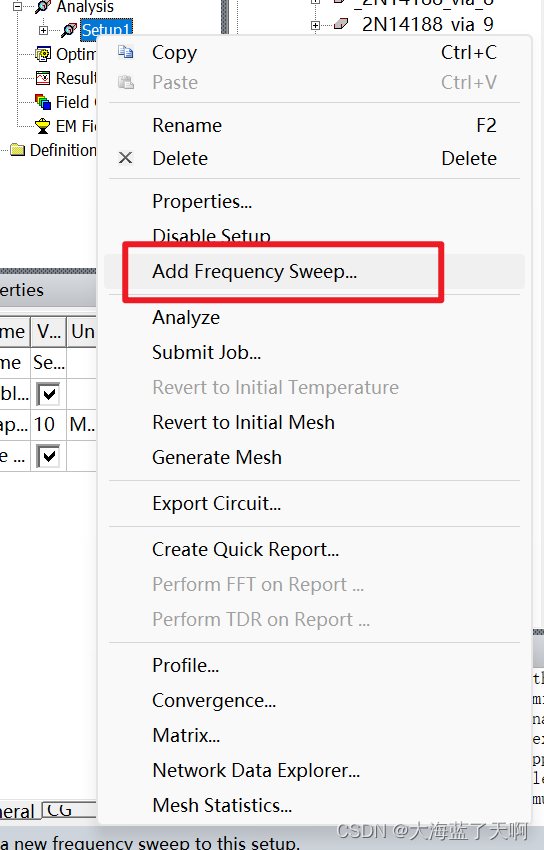
在新弹出的窗口修改start、end以及步长大小
5.2 开始分析
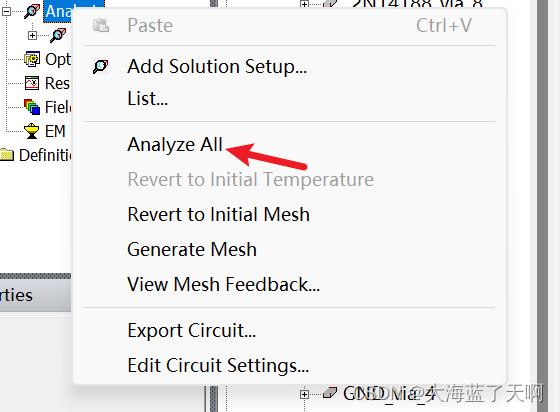
在analysis上右键选择analyze all,然后就等待,右下角会出现进度条
如果结束以后会出现一个完成的提示,在信息栏中看

6 查看结果
在results右键选择solution data,打开分析的结果页面
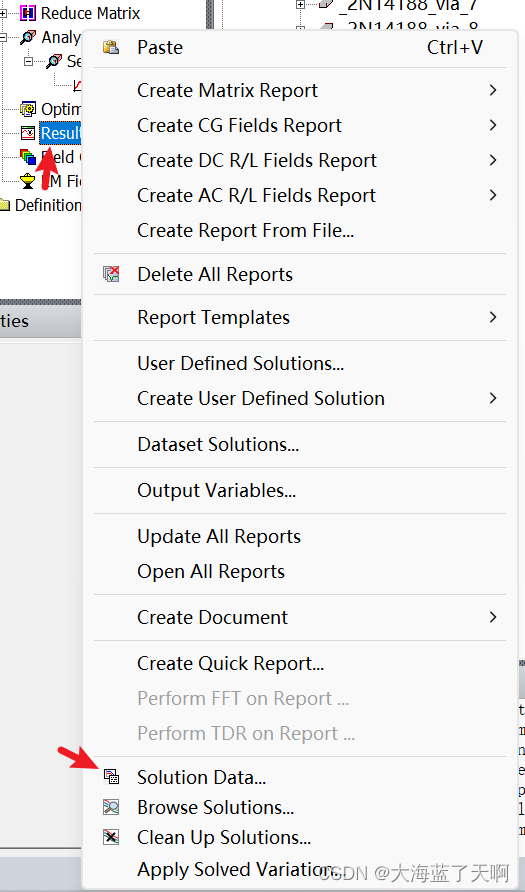
选择AC RL,选择想要分析的频率,就可以看到回路寄生电阻和寄生电感

这篇关于用ansys q3d提取pcb板上的寄生参数及注意事项的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


