本文主要是介绍019——IIC模块驱动开发(基于EEPROM【AT24C02】和I.MX6uLL),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、 IIC基础知识
二、Linux中的IIC(韦东山老师的学习笔记)
1. I2C驱动程序的层次
2. I2C总线-设备-驱动模型
2.1 i2c_driver
2.2 i2c_client
三、 AT24C02 介绍
四、 AT24C02驱动开发
实验
驱动程序
应用程序
一、 IIC基础知识
总线类设备驱动——IIC_iic设备驱动-CSDN博客
Exynos_4412——IIC总线概述_.若使用iic总线让从机给主机发送一个字节的数据0xa2,画出scl和sda上的时序图-CSDN博客
STM32——IIC总线(MPU6050应用)_mpu6050例程-CSDN博客
写过好多次啦不打算重复写了。
二、Linux中的IIC(韦东山老师的学习笔记)
参考资料:
-
Linux内核文档:
-
Documentation\i2c\instantiating-devices.rst -
Documentation\i2c\writing-clients.rst
-
-
Linux内核驱动程序示例:
-
drivers/eeprom/at24.c
-
1. I2C驱动程序的层次
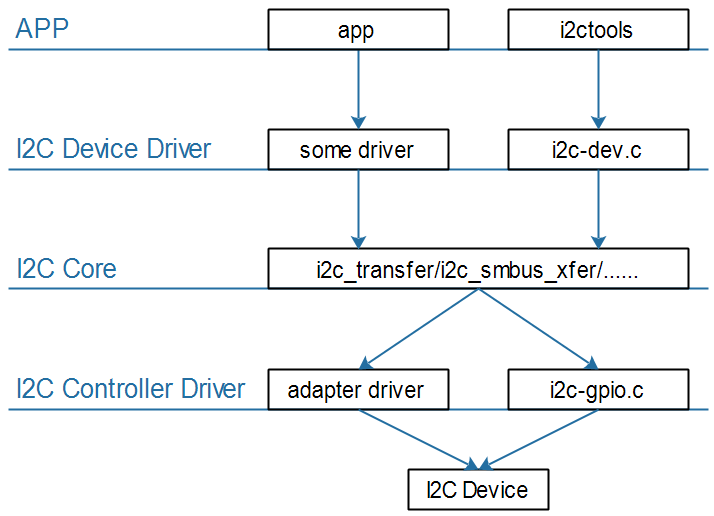
I2C Core就是I2C核心层,它的作用:
-
提供统一的访问函数,比如i2c_transfer、i2c_smbus_xfer等
-
实现
I2C总线-设备-驱动模型,管理:I2C设备(i2c_client)、I2C设备驱动(i2c_driver)、I2C控制器(i2c_adapter)
2. I2C总线-设备-驱动模型
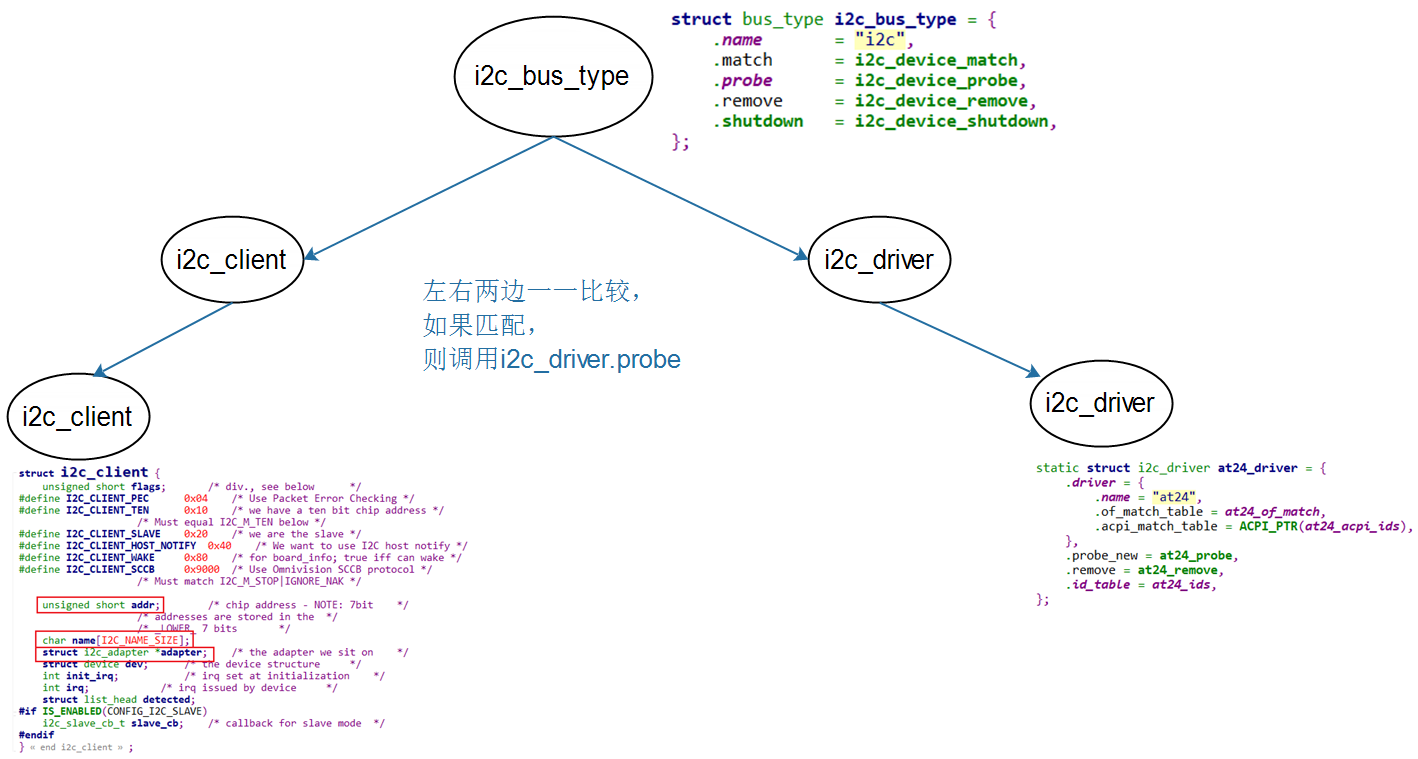
2.1 i2c_driver
i2c_driver表明能支持哪些设备:
-
使用of_match_table来判断
-
设备树中,某个I2C控制器节点下可以创建I2C设备的节点
-
如果I2C设备节点的compatible属性跟of_match_table的某项兼容,则匹配成功
-
-
i2c_client.name跟某个of_match_table[i].compatible值相同,则匹配成功
-
-
使用id_table来判断
-
i2c_client.name跟某个id_table[i].name值相同,则匹配成功
-
i2c_driver跟i2c_client匹配成功后,就调用i2c_driver.probe函数。
2.2 i2c_client
i2c_client表示一个I2C设备,创建i2c_client的方法有4种:
方法1
-
通过I2C bus number来创建
int i2c_register_board_info(int busnum, struct i2c_board_info const *info, unsigned len);
-
通过设备树来创建
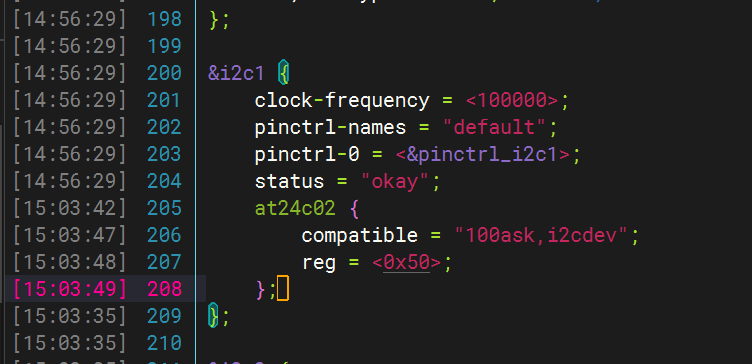
i2c1: i2c@400a0000 {/* ... master properties skipped ... */clock-frequency = <100000>;flash@50 {compatible = "atmel,24c256";reg = <0x50>;};pca9532: gpio@60 {compatible = "nxp,pca9532";gpio-controller;#gpio-cells = <2>;reg = <0x60>;};};方法2
有时候无法知道该设备挂载哪个I2C bus下,无法知道它对应的I2C bus number。 但是可以通过其他方法知道对应的i2c_adapter结构体。 可以使用下面两个函数来创建i2c_client:
-
i2c_new_device
static struct i2c_board_info sfe4001_hwmon_info = {I2C_BOARD_INFO("max6647", 0x4e),};int sfe4001_init(struct efx_nic *efx){(...)efx->board_info.hwmon_client =i2c_new_device(&efx->i2c_adap, &sfe4001_hwmon_info);(...)}i2c_new_probed_device
static const unsigned short normal_i2c[] = { 0x2c, 0x2d, I2C_CLIENT_END };static int usb_hcd_nxp_probe(struct platform_device *pdev){(...)struct i2c_adapter *i2c_adap;struct i2c_board_info i2c_info;(...)i2c_adap = i2c_get_adapter(2);memset(&i2c_info, 0, sizeof(struct i2c_board_info));strscpy(i2c_info.type, "isp1301_nxp", sizeof(i2c_info.type));isp1301_i2c_client = i2c_new_probed_device(i2c_adap, &i2c_info,normal_i2c, NULL);i2c_put_adapter(i2c_adap);(...)}差别:
-
i2c_new_device:会创建i2c_client,即使该设备并不存在
-
i2c_new_probed_device:
-
它成功的话,会创建i2c_client,并且表示这个设备肯定存在
-
I2C设备的地址可能发生变化,比如AT24C02的引脚A2A1A0电平不一样时,设备地址就不一样
-
可以罗列出可能的地址
-
i2c_new_probed_device使用这些地址判断设备是否存在
-
-
方法3(不推荐):由i2c_driver.detect函数来判断是否有对应的I2C设备并生成i2c_client
-
方法4:通过用户空间(user-space)生成 调试时、或者不方便通过代码明确地生成i2c_client时,可以通过用户空间来生成。
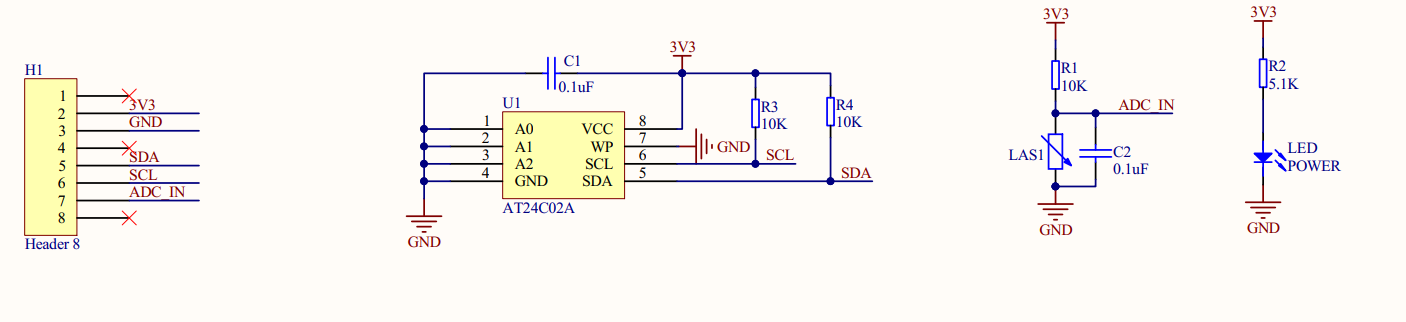
// 创建一个i2c_client, .name = "eeprom", .addr=0x50, .adapter是i2c-3# echo eeprom 0x50 > /sys/bus/i2c/devices/i2c-3/new_device// 删除一个i2c_client# echo 0x50 > /sys/bus/i2c/devices/i2c-3/delete_device三、 AT24C02 介绍
AT24C02 是基于 I2C 总线的存储器件,由于接口方便,体积小,数据掉电不丢失等特点,在仪器仪表及工业自动化控制中得到大量的应用。百问网提供的 EEPROM 模块使用的就是 AT24C02,使用 8 位地址,存储容量为 2K bit,即 2048bit = 256*8bit = 256 Byte, 其中它被分为 32 页,每页 8Byte。
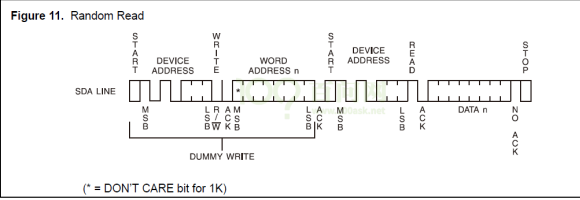
基于 I2C 接口的设备操作,我们主要关心的是 I2C 数据格式。 AT24C02 作为 EEPROM 存储设备,显然我们关心的是:怎么读写某个地址,即怎么发地址、怎么读写数据。 查阅《AT24CXX.pdf》手册,要写入一个字节,可如下操作:先发出设备地址, 再发出 WORD 地址(即存储地址),再发出数据。

反之,要读 AT24C02,如下图:涉及 2 次 I2C 传输。 先发出设备地址, WORD地址;再次发出设备地址,读到数据。

四、 AT24C02驱动开发
实验
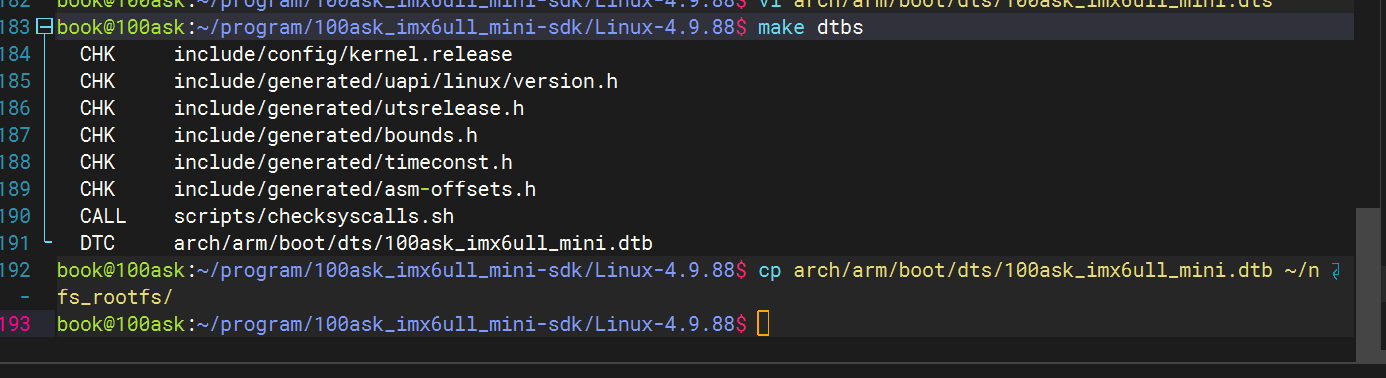
 先添加设备树
先添加设备树
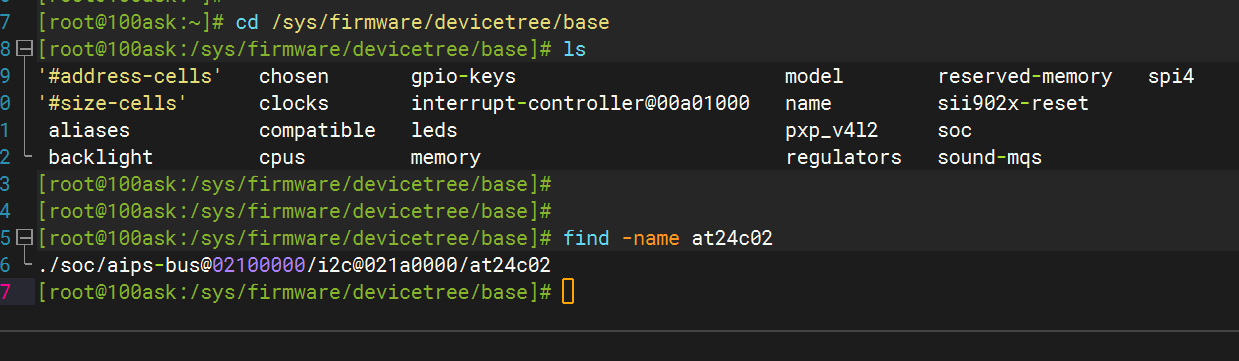
这是我们的设备树目录
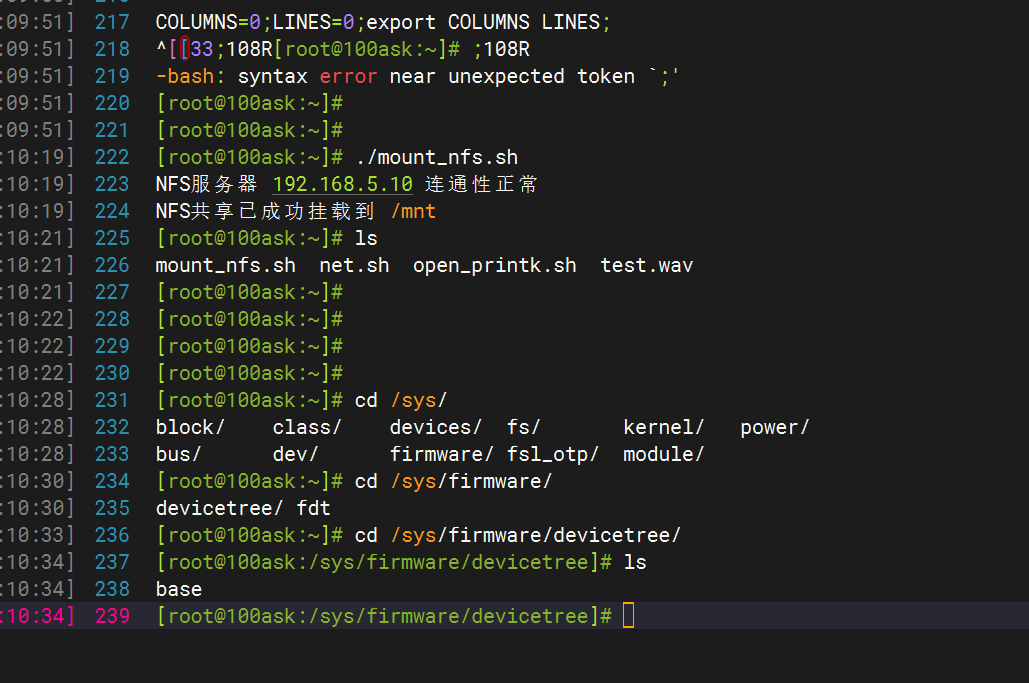
可以用find找到我们刚添加的设备目录
咱们用的这个小工具有个配置项可以设置一下很方便
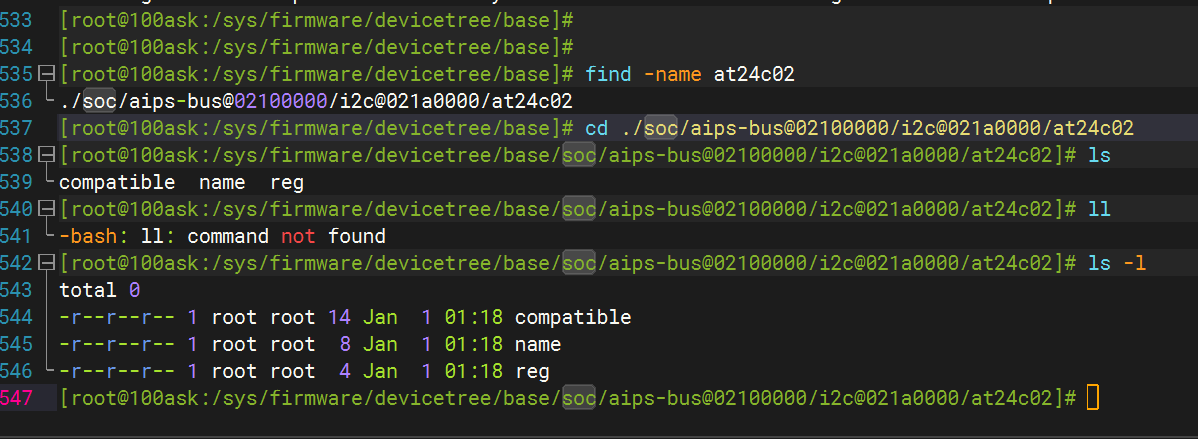

reg这个可能是特殊的加密文件需要用hexdump去看


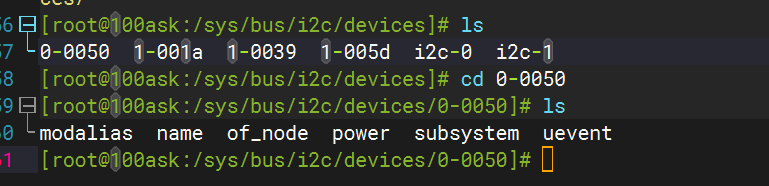
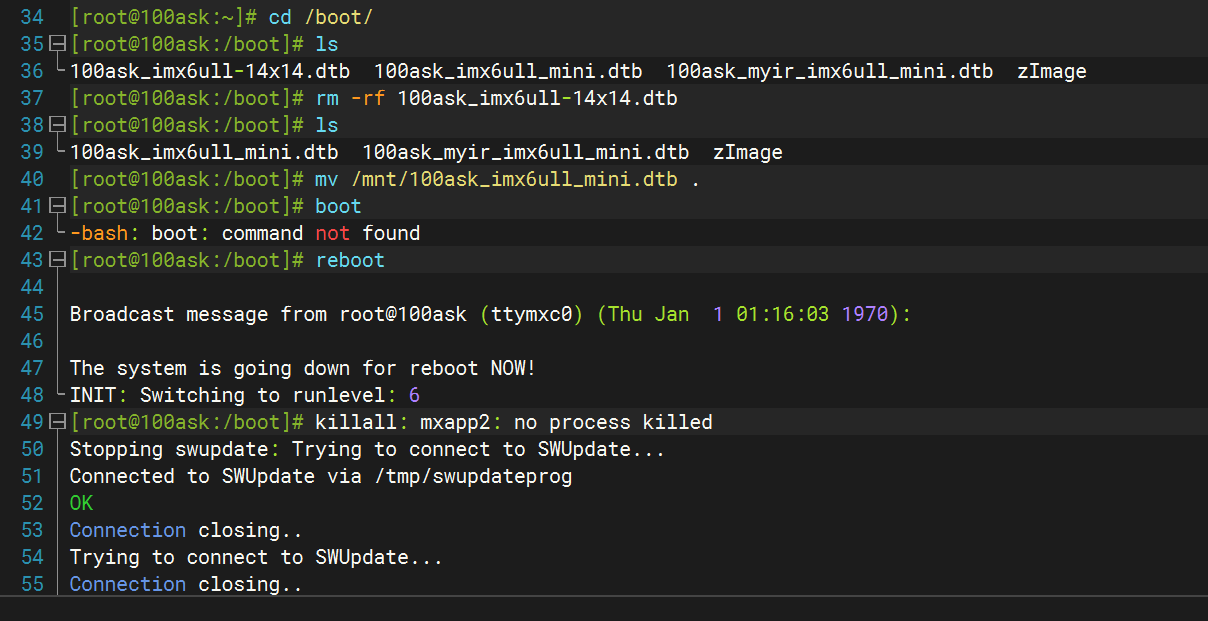
虽然我们是iic-1但是内核是从0开始的所以这个就是我们的设备目录
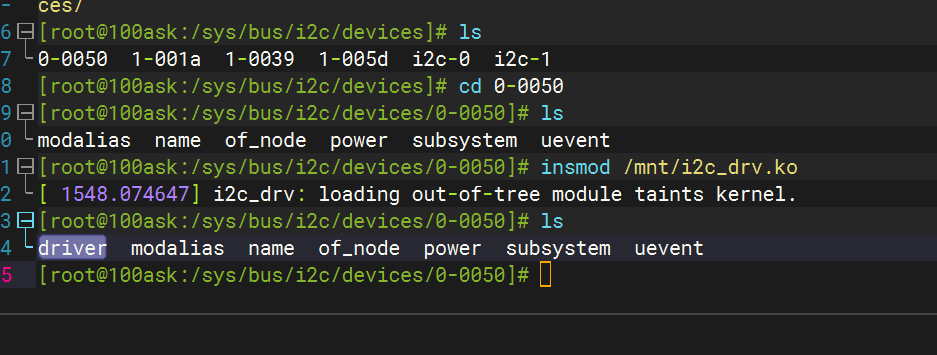
插入模块后我们的驱动就出来了,没写的时候读出来是一堆乱码

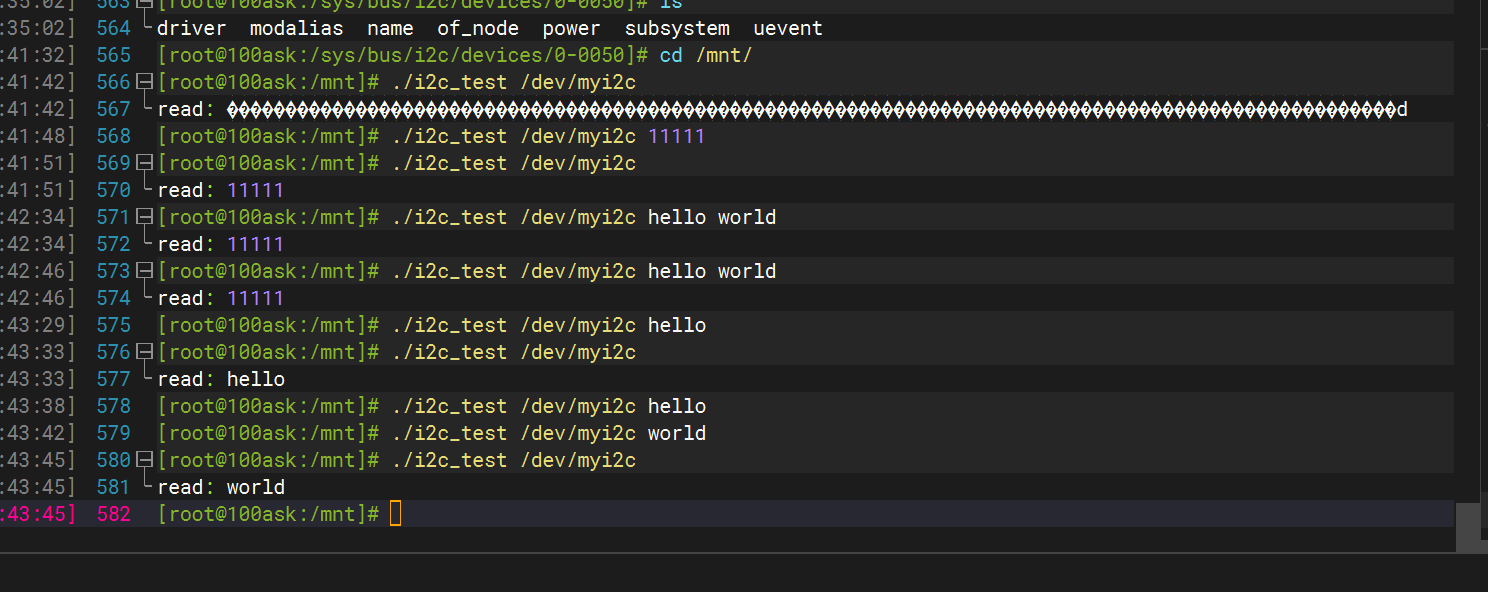
验证一下它的非易失性
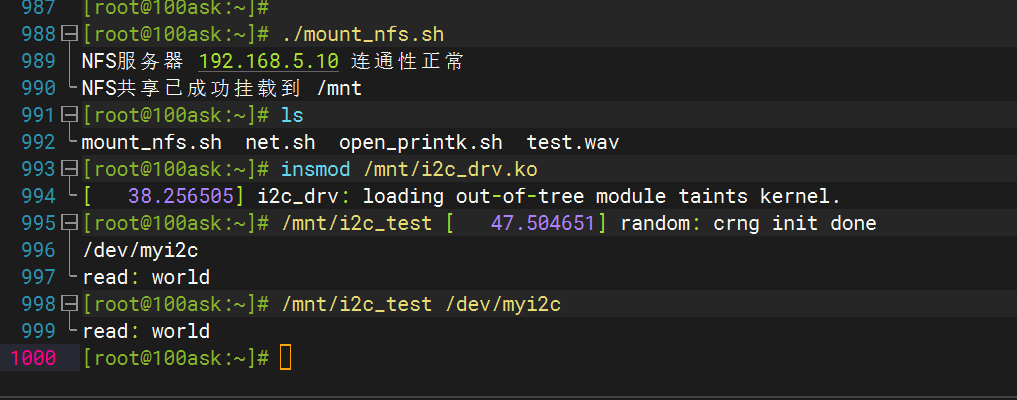
没毛病
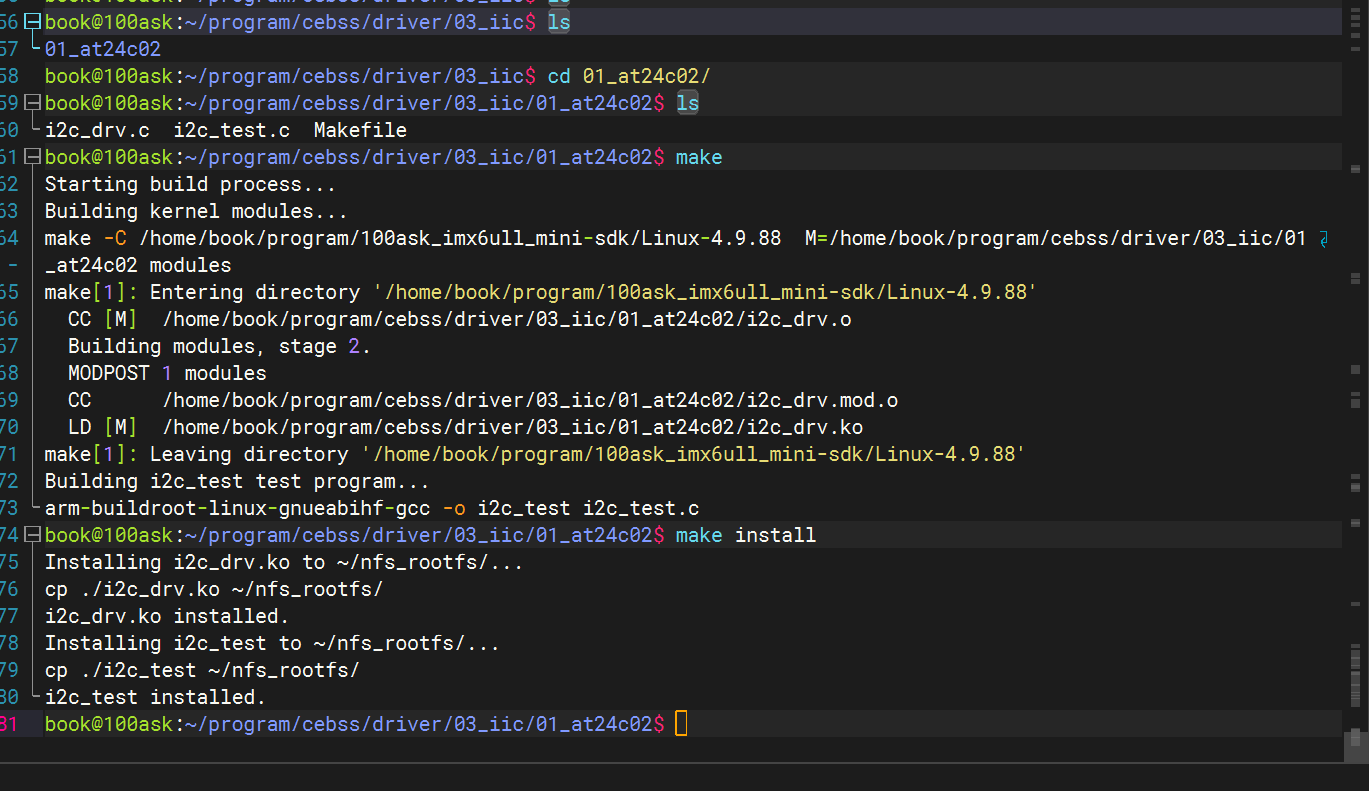
驱动程序
#include "asm/uaccess.h"
#include "linux/delay.h"
#include "linux/i2c.h"
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>/* 主设备号 */
static int major = 0;
static struct class *my_i2c_class;static struct i2c_client *g_client;static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
struct fasync_struct *i2c_fasync;/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t i2c_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{int err;unsigned char *kern_buf;struct i2c_msg msgs[2];/* 从0读取size字节 */kern_buf = kmalloc(size, GFP_KERNEL);/* 初始化i2c_msg * 1. 发起一次写操作: 把0发给AT24C02, 表示要从0地址读数据* 2. 发起一次读操作: 得到数据*/msgs[0].addr = g_client->addr;msgs[0].flags = 0; /* 写操作 */msgs[0].buf = kern_buf;kern_buf[0] = 0; /* 把数据0发给设备 */msgs[0].len = 1;msgs[1].addr = g_client->addr;msgs[1].flags = I2C_M_RD; /* 写操作 */msgs[1].buf = kern_buf;msgs[1].len = size;err = i2c_transfer(g_client->adapter, msgs, 2);/* copy_to_user */err = copy_to_user(buf, kern_buf, size);kfree(kern_buf);return size;
}static ssize_t i2c_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{int err;unsigned char kern_buf[9];struct i2c_msg msgs[1];int len;unsigned char addr = 0;/* 把size字节的数据写入地址0 *///kern_buf = kmalloc(size+1, GFP_KERNEL);while (size > 0){if (size > 8)len = 8;elselen = size;size -= len;/* copy_from_user */err = copy_from_user(kern_buf+1, buf, len);buf += len;/* 初始化i2c_msg * 1. 发起一次写操作: 把0发给AT24C02, 表示要从0地址读数据* 2. 发起一次读操作: 得到数据*/msgs[0].addr = g_client->addr;msgs[0].flags = 0; /* 写操作 */msgs[0].buf = kern_buf;kern_buf[0] = addr; /* 写AT24C02的地址 */msgs[0].len = len+1;addr += len;err = i2c_transfer(g_client->adapter, msgs, 1);mdelay(20);}//kfree(kern_buf);return size;
}static unsigned int i2c_drv_poll(struct file *fp, poll_table * wait)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_wait, wait);//return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;return 0;
}static int i2c_drv_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &i2c_fasync) >= 0)return 0;elsereturn -EIO;
}/* 定义自己的file_operations结构体 */
static struct file_operations i2c_drv_fops = {.owner = THIS_MODULE,.read = i2c_drv_read,.write = i2c_drv_write,.poll = i2c_drv_poll,.fasync = i2c_drv_fasync,
};static int i2c_drv_probe(struct i2c_client *client,const struct i2c_device_id *id)
{// struct device_node *np = client->dev.of_node;// struct i2c_adapter *adapter = client->adapter;/* 记录client */g_client = client;/* 注册字符设备 *//* 注册file_operations */major = register_chrdev(0, "100ask_i2c", &i2c_drv_fops); /* /dev/gpio_desc */my_i2c_class = class_create(THIS_MODULE, "100ask_i2c_class");if (IS_ERR(my_i2c_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "100ask_i2c");return PTR_ERR(my_i2c_class);}device_create(my_i2c_class, NULL, MKDEV(major, 0), NULL, "myi2c"); /* /dev/myi2c */return 0;
}static int i2c_drv_remove(struct i2c_client *client)
{/* 反注册字符设备 */device_destroy(my_i2c_class, MKDEV(major, 0));class_destroy(my_i2c_class);unregister_chrdev(major, "100ask_i2c");return 0;
}static const struct of_device_id myi2c_dt_match[] = {{ .compatible = "100ask,i2cdev" },{},
};static const struct i2c_device_id at24c02_ids[] = {{ "xxxxyyy", (kernel_ulong_t)NULL },{ /* END OF LIST */ }
};
static struct i2c_driver my_i2c_driver = {.driver = {.name = "100ask_i2c_drv",.owner = THIS_MODULE,.of_match_table = myi2c_dt_match,},.probe = i2c_drv_probe,.remove = i2c_drv_remove,.id_table = at24c02_ids,
};static int __init i2c_drv_init(void)
{/* 注册i2c_driver */return i2c_add_driver(&my_i2c_driver);
}static void __exit i2c_drv_exit(void)
{/* 反注册i2c_driver */i2c_del_driver(&my_i2c_driver);
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(i2c_drv_init);
module_exit(i2c_drv_exit);MODULE_LICENSE("GPL");应用程序
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>static int fd;/** ./i2c_test /dev/myi2c string * ./i2c_test /dev/myi2c**/
int main(int argc, char **argv)
{int ret;char buf[100];/* 1. 判断参数 */if (argc < 2) {printf("Usage:\n", argv[0]);printf(" %s <dev>, read at24c02\n", argv[0]);printf(" %s <dev> <string>, write at24c02\n", argv[0]);return -1;}/* 2. 打开文件 */fd = open(argv[1], O_RDWR | O_NONBLOCK);if (fd == -1){printf("can not open file %s\n", argv[1]);return -1;}if (argc == 3){ret = write(fd, argv[2], strlen(argv[2]) + 1);}else{ret = read(fd, buf, 100);printf("read: %s\n", buf);}close(fd);return 0;
}这篇关于019——IIC模块驱动开发(基于EEPROM【AT24C02】和I.MX6uLL)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





