本文主要是介绍《学一辈子光线追踪》 五 产生随机方向,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
蒙特卡洛光线追踪技术系列 见 蒙特卡洛光线追踪技术
这一节结束后,我会对前面的关于概率和光线追踪的知识进行一下总结和归纳。
在本章和下两章中,让我们加强理解和工具,找出哪个康奈尔盒子的渲染结果是正确的。我们先来看看如何生成随机方向,但为了简化,我们假设z轴是曲面法向,theta是与法向的夹角。我们将在下一章中把它们定向到曲面法向量。我们只讨论关于z的旋转对称分布,所以p(direction) = f(theta)。如果你有学过高级微积分,你可能记得在球坐标系的球面上 dA = sin(theta)*dtheta*dphi 。如果你没有,下一步你必须遵守我说的,但当你学习过高级微积分时你会得到它。
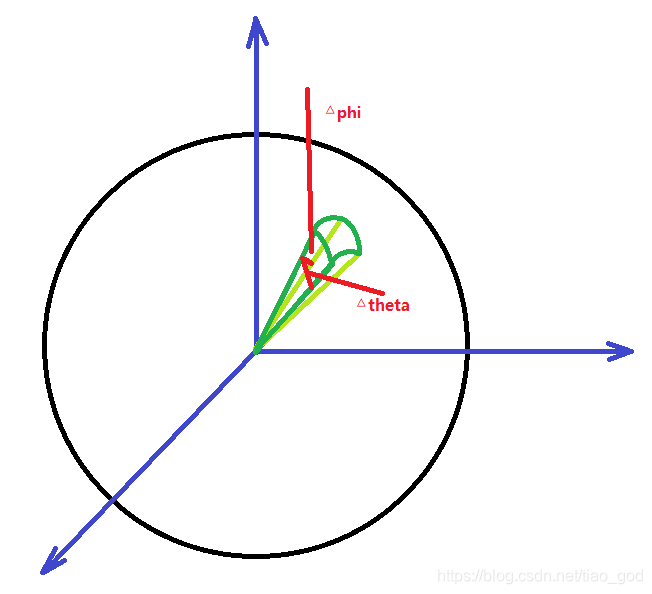
给定球面上的方向pdf,p(direction) = f(theta),theta和phi上的一维pdf为:
a(phi) = 1/(2Pi) (是uniform的)
b(theta) = 2*Pi*f(theta)sin(theta) (说明竖直方向的pdf与sin(theta)相关)
对于均匀随机数r1和r2,第2章中介绍的材料得到:
r1 = INTEGRAL_0^phi (1/(2*Pi)) = phi/(2*Pi)
即 :
解 phi 我们得到:
phi = 2*Pi*r1
对theta 我们有:
r2 = INTEGRAL_0^theta 2*Pi*f(t)sin(t)
即 :
这里,t是一个伪变量。让我们为f() 尝试一些不同的函数。
一、让我们先在球体上尝试均匀的密度。单位球的面积是4Pi,因此单位球上的均匀 p(direction) = 1/(4Pi)。f(theta)=p(direction),代进去计算得:
r2 = -cos(theta)/2 - (-cos(0)/2)= (1 - cos(theta))/2
解 cos(theta) 得到:
cos(theta) = 1 - 2*r2
我们不为theta求解,因为我们可能只需要知道cos(theta),也不希望不必要的 acos() 调用到处运行。
要生成朝向 (θ,phi) 的单位矢量方向,我们将其转换为笛卡尔坐标:
x = cos(phi)*sin(theta)
y = sin(phi)*sin(theta)
z = cos(theta)
利用cos^2+sin^2=1的恒等式,我们得到以下随机项 (r1,r2):
x = cos(2*Pi*r1)*sqrt(1 - (1-2*r2)^2)
y = sin(2*Pi*r1)*sqrt(1 - (1-2*r2)^2)
z = 1 - 2*r2
简化一点,(1-2*r2)^2 = 1 - 4*r2 + 4*r2^2,所以:
x = cos(2*Pi*r1)*2*sqrt(r2*(1-r2))
y = sin(2*Pi*r1)*2*sqrt(r2*(1-r2))
z = 1 - 2*r2
我们可以输出来显示。为了方便这里就用OpenGL来进行显示:
#include <stdlib.h>
/*Note that the __glut*WithExit routines should NEVER be called directly.
To avoid the atexit workaround, #define GLUT_DISABLE_ATEXIT_HACK.*/
#define GLUT_DISABLE_ATEXIT_HACK
#include "glut.h"#include<gl/glu.h>
#include<gl/gl.h>#include "vec3.h"
#define WIDTH 500
#define HEIGHT 500
#include <math.h>
#include <stdlib.h>
#include <stdio.h>
#include "time.h"
#define M_PI 3.14159265
GLfloat viewR = 8.0; //曾经的
float x_k = 1, y_k = 1;//因为坐标轴可能反转,所以设置一个系数。
float upValue = 1.0;
GLuint mainw, subw1;
float OrthoLength = 5.0;
float x_y_cor = 45;
float z_cor = 45;
int flag = 0; //判断是否按下的flag
static int current_Dot[2] = { 0, 0 };
float dx, dy;double myRandom() {return rand() / (RAND_MAX + 1.0);
}void display(void) {glClearColor(1.0f, 1.0f, 1.0f, 0.0f);glLineWidth(1.0);glMatrixMode(GL_PROJECTION);glLoadIdentity();//glOrtho(-OrthoLength, OrthoLength, -OrthoLength*((double)screenheight/(double)screenwidth)//, OrthoLength*((double)screenheight / (double)screenwidth), 0.1, 100); //把世界坐标宽6.0高6.0的世界放入视口中。gluPerspective(45, (double)HEIGHT / (double)WIDTH, 0.1, 100);glMatrixMode(GL_MODELVIEW);glLoadIdentity();//第二个是z gluLookAt(x_k*viewR * cos(z_cor*M_PI / 180)*cos(x_y_cor*M_PI / 180), viewR * sin(z_cor*M_PI / 180),y_k*viewR * cos(z_cor*M_PI / 180)* sin(x_y_cor*M_PI / 180), 0.0, 0.0, 0.0, 0.0, upValue, 0.0);//第一个是 两箭头 第二个是 一箭头 第三个是 三箭头glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);glColor3d(1.0, 0, 0);glutSwapBuffers();
}
void myMouse(int button, int state, int x, int y) {if (state == GLUT_DOWN){if (button == GLUT_LEFT_BUTTON){flag = 1;current_Dot[0] = x; current_Dot[1] = HEIGHT - y;}}else if (state == GLUT_UP) {if (button == GLUT_LEFT_BUTTON) {flag = 0;}}
}void myMovedMouse(int x, int y) {if (flag == 1){dy = HEIGHT - y - current_Dot[1];dx = x - current_Dot[0];z_cor = z_cor - dy / 3;if (z_cor<-360) {z_cor = z_cor + 360;}else if (z_cor > 360) {z_cor = z_cor - 360;}if ((z_cor > 90 && z_cor<270) | (z_cor<-90 && z_cor>-270)) {upValue = -1.0;}else {upValue = 1.0;}x_y_cor = x_y_cor + dx / 3;if (x_y_cor > 360) {x_y_cor = x_y_cor - 360;}else if (x_y_cor < -360) {x_y_cor = x_y_cor + 360;}current_Dot[0] = x;current_Dot[1] = HEIGHT - y;display();}}
void reShape(int width, int height) {glViewport(0, 0, width, height);
}
int main(int argc,char **argv) {glutInit(&argc, argv);glutInitDisplayMode(GLUT_DOUBLE | GLUT_RGB);glutInitWindowSize(WIDTH, HEIGHT);glutInitWindowPosition(150, 100);glutCreateWindow("Feimos");glViewport(0, 0, WIDTH, HEIGHT);glEnable(GL_DEPTH_TEST);glutDisplayFunc(display);glutReshapeFunc(reShape);glutMouseFunc(myMouse);glutMotionFunc(myMovedMouse);glutMainLoop();
}先把可以进行转动的框架打好,然后开始往里面写数据:
srand(time(NULL));for (int i = 0;i < N;i++) {float r1 = myRandom();float r2 = myRandom();float x = cos(2 * M_PI*r1) * 2 * sqrt(r2*(1 - r2));float y = sin(2 * M_PI*r1) * 2 * sqrt(r2*(1 - r2));float z = 1 - 2 * r2;myRandomPoint[i].e[0] = x;myRandomPoint[i].e[1] = y;myRandomPoint[i].e[2] = z;}并进行显示:
for (int i = 0;i < N;i++) {glPushMatrix();glTranslatef(myRandomPoint[i].e[0], myRandomPoint[i].e[1], myRandomPoint[i].e[2]);glutWireSphere(0.02, 20, 20);glPopMatrix();//弹出现在的栈}可以得到图:
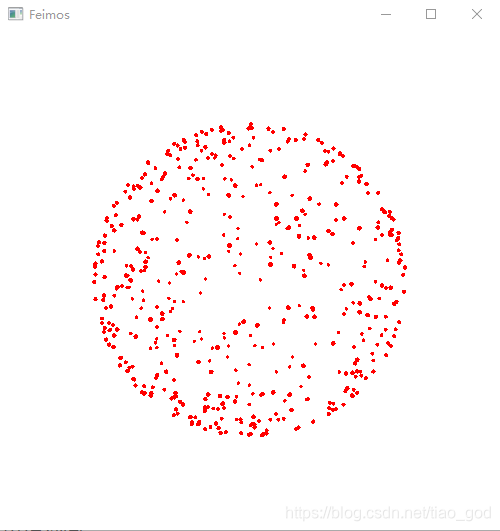
可以看到分布挺均匀的(在程序里可以360度转动)。
二、现在让我们推导半球上的一致性。半球上的密度均匀意味着 p(direction) = 1/(2*Pi) ,仅仅改变θ方程中的常数,就会得到:
cos(theta) = 1 - r2
令人欣慰的是cos(theta) 将从1变为0,因此theta将从0变为Pi/2。与其绘制它,不如对已知解进行二维积分。让我们在半球上积分余弦立方(用已知解任意选取)。首先让我们用手来做:
INTEGRAL cos^3 = 2*Pi*INTEGRAL_0^PI/2 cos^3 sin = PI/2.
现在积分重要性抽样。p(direction) = 1/(2*Pi),所以我们平均 f/p 为 cos^3/ (1/(2*Pi)) ,我们可以测试:
x = cos(2 * M_PI * r1) * 2 * sqrt(r2 * (1 - r2));y = sin(2 * M_PI * r1) * 2 * sqrt(r2 * (1 - r2));z = 1 - r2;sum += (z*z*z) / (1.0 / (2.0*M_PI));得到结果:
三、为了检验一下之前的结果,再测试一下lambertian物体的pdf:
p(direction) = cos(theta) / Pi
r2 = INTEGRAL_0^theta 2*Pi*cos(t)/Pi * sint dt = (-cos^2 t)|0-theta = 1 - cos^2(theta)
cos(theta) = sqrt(1-r2)
所以:
x = cos(2*Pi*r1)*sqrt(r2)
y = sin(2*Pi*r1)*sqrt(r2)
z = sqrt(1-r2)
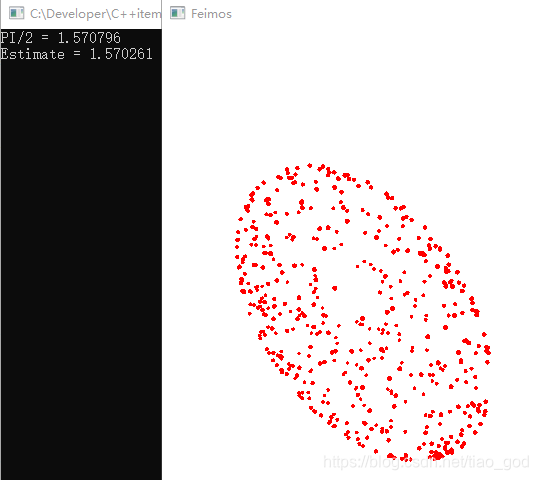
float sum = 0.0;for (int i = 0;i < N;i++) {float r1 = myRandom();float r2 = myRandom();//float x = cos(2 * M_PI*r1) * 2 * sqrt(r2*(1 - r2));//float y = sin(2 * M_PI*r1) * 2 * sqrt(r2*(1 - r2));//float z = 1 - 2 * r2;float x = cos(2 * M_PI*r1) * sqrt(r2);float y = sin(2 * M_PI*r1) * sqrt(r2);float z = sqrt(1 - r2);//float x = cos(2 * M_PI*r1) * 2 * sqrt(r2*(1 - r2));//float y = sin(2 * M_PI*r1) * 2 * sqrt(r2*(1 - r2));//float z = 1 - r2;myRandomPoint[i].e[0] = x;myRandomPoint[i].e[1] = y;myRandomPoint[i].e[2] = z;//sum += (z*z*z) / (1.0 / (2.0*M_PI));sum += (z*z*z) / (z / (M_PI));}得到结果:
很明显,越靠近球体上方的密度越大。
根据计算,模拟半球比p(direction)=cos(theta)/Pi的效果要好。??感觉,不大对啊,于情于理感觉都是cos(theta)/Pi更好啊。
我又对比运行了好几次,都是模拟半球更好,突然发现自己有个地方写错了:
double x = cos(2 * M_PI*r1) * 2 * sqrt(r2);
double y = sin(2 * M_PI*r1) * 2 * sqrt(r2);
应该中间乘2。我重新写了个完整的代码:
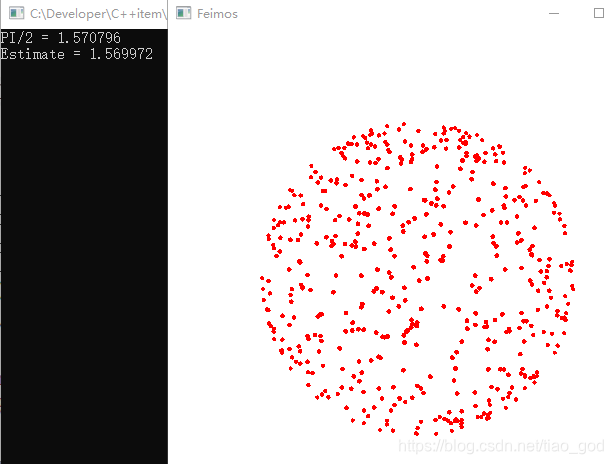
double sum1 = 0.0;double sum2 = 0.0;for (int i = 0;i < N;i++) {double r1 = myRandom();double r2 = myRandom();//float x = cos(2 * M_PI*r1) * 2 * sqrt(r2*(1 - r2));//float y = sin(2 * M_PI*r1) * 2 * sqrt(r2*(1 - r2));//float z = 1 - 2 * r2;//p(directions) = cos(theta) / Pidouble x = cos(2 * M_PI*r1) * 2 * sqrt(r2);double y = sin(2 * M_PI*r1) * 2 * sqrt(r2);double z = sqrt(1 - r2);sum1 += (z*z*z) / (z / (M_PI));// p(direction) = 1/(2*Pi)x = cos(2 * M_PI * r1) * 2 * sqrt(r2 * (1 - r2));y = sin(2 * M_PI * r1) * 2 * sqrt(r2 * (1 - r2));z = 1 - r2;sum2 += (z*z*z) / (1.0 / (2.0*M_PI));myRandomPoint[i].e[0] = x;myRandomPoint[i].e[1] = y;myRandomPoint[i].e[2] = z;}printf("PI/2 = %lf\n",M_PI/2);printf("Estimate = %lf\n", sum1/N);printf("Difference = %lf\n",(sum1/N-M_PI/2));printf("PI/2 = %lf\n", M_PI / 2);printf("Estimate = %lf\n", sum2 / N);printf("Difference = %lf\n", (sum2 / N - M_PI / 2));得到最终结果:

可以证实 cos(theta)/Pi预测更好一些。
这篇关于《学一辈子光线追踪》 五 产生随机方向的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





