本文主要是介绍【论文精读】MAE,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
摘要
将掩码重建任务从nlp引入到cv,提出非对称掩码自编码器。
框架

概述
如上图,本文提出掩码自编码器,即将给定原始信号的部分观测值的情况下重建原始信号,编码器将观察到的部分信号(没有掩码标记)映射到潜在表示,采用轻量级的解码器从潜在表示重建原始信号,模型采用了非对称设计。
掩码
类似ViT,将图像划分为规则的非重叠patch,按照均匀分布对无替换的随机patch进行采样,即随机抽样。随后屏蔽(删除patch)其余未被采样的patch。


采用高屏蔽率(删除patch的比率)的随机抽样可以在很大程度消除了冗余,从而创建了一个不能通过可见的邻近patch外推而轻松解决的任务(如上几幅图)。而均匀分布可以防止中心归纳偏好(图像中心附近有更多的掩码块)。
MAE编码器
编码器为原始ViT,且只应用未屏蔽的patch,并采用线性投影计算这些patch的patch embedding,并添加position embedding,然后通过一系列Transformer块处理结果集。
MAE解码器
如图1,解码器的输入是完整的patch集,包括编码器输出的未屏蔽patch的特征token和mask tokens。其中,每个mask tokens都是一个共享的、可学习的向量,表示要预测的缺失patch。随后向这个完整patch集合添加position embedding。
解码器仅在预训练任务中重建图像,而其余的下游任务形式多种多样,实际应用时不用解码器。所以解码器的设计和编码器是解耦的,解码器可以设计得简单、轻量(比编码器更窄、更浅。窄:对应通道数;浅:对应深度)。
目标重建
MAE通过预测每个掩码patch的像素值来重建输入。解码器的最后一层为线性投影,其输出通道的数量等于patch中的像素值的数量,其输出代表输入patch的像素值向量,并将输出重塑以形成重建的图像。损失函数为计算像素空间中重建图像和原始图像之间的均方误差(MSE)。且仅在掩码patch上计算损失。
本文还研究了一种变体,其重建目标是每个掩码 patch的归一化像素值。即计算一个掩码 patch中所有像素的均值和标准差,然后用来归一化这对应的掩码patch作为目标。实验中,使用归一化像素作为重建目标可以提高表示质量。
实现
- 将输入图像划分为patches ( B , C , H , W ) → ( B , N , P × P × C ) (B,C,H,W)→(B,N,P \times P \times C) (B,C,H,W)→(B,N,P×P×C)
- 对所有patch计算patch embedding,生成tokens,并加入position embeddings,维度变换为 ( B , N , P × P × C ) → ( B , N , d i m ) (B,N,P \times P \times C)→(B,N,dim) (B,N,P×P×C)→(B,N,dim)
- 根据预设的掩码比例(75%),使用服从均匀分布的随机采样策略采样一部分前一步骤得到的tokens送给编码器,另一部分被mask掉
- 将编码器编码后的tokens与masked tokens按照原先在patch形态时对应的次序拼在一起,输入给解码器
- 解码器解码后取出masked tokens对应的部分送入到全连接层,对masked patches的像素值进行预测,最后将预测结果与masked patches进行比较,计算MSE loss
实验
ImageNet实验
实验在ImageNet-1K(IN1K)训练集上采用ViT进行自监督预训练,然后进行监督训练,评估端到端微调或线性检测的表现。
实验配置
ViT架构实验遵循标准的ViT架构。其有一个Transformer块的堆栈,其中每个块由一个多头自注意力块和一个MLP块组成,两者都具有LayerNorm(LN)。编码器以LN结尾。由于MAE编码器和解码器宽度不同,在编码器之后采用线性投影层对其进行调整匹配。MAE向编码器和解码器输入添加了位置嵌入,没有使用相对位置或层缩放。
从编码器输出中提取特征以进行微调和线性探测。由于ViT有一个类标记,为了适应这种设计在MAE预训练中向编码器输入添加了一个辅助token。此token被视为在线性探测和微调中训练分类器的类token,实验证明MAE在没有这个token的情况下(使用平均池化)也同样表现得很好。

上图为预训练配置。相对于ViT官方源码,没有使用color jittering、drop path、gradient clip。

上图为微调及部分微调配置。微调使用layer-wise learning rate decay,部分微调只微调编码器的最后几个层。

上图为线性检测配置。线性检测和微调有不同,regularization对线性检测可能会损失模型性能,因此舍弃了一些regularization strategies,例如mixup、cutmix、drop path、color jittering。并对输入执行normalization,同时在预训练特征层和线性分类层之间加上一个额外的BN,可以实现特征的标准化。
消融实验

上图实验mask比例。观察到微调和线性检测时,mask比例逐渐升高,性能更好。 线性检测近似线性增涨,而微调则是mask比例在30%~40%时激增,而后就倾向于饱和。
线性检测时为mask比例越高,预训练时得到的编码器越强,这部分在下游任务中不再被训练的了,所以其性能就随着mask比例的增加呈线性增涨的趋势。

微调时,结果对mask比例不太敏感,大范围的屏蔽比率(40- 80%)都可以很好地工作。最优mask比例是75%。如上图可视化结果。

上图a显示解码器深度对微调和线性探测任务的影响。观察到足够深的解码器对线性探测很重要,因为自编码器的最后几层更专注于重建,与识别不太相关,预训练与线性检测之间存在gap。故合理深度的解码器(8层)可以使潜在表示的语义信息更抽象,可以改进8%的线性探测精度。对于微调,解码器深度对改进微调的影响较小,故只使用单层解码器的MAE也可以在微调中表现良好(84.8%),这么小的解码器可以进一步加快训练速度。
图b实验解码器宽度,也得出与a类似的结论,通道数为512时微调和线性探测精度最优。故编码器默认是8个blocks,通道数是512。

图c实验编码器是否接受mask tokens。实验表明,encoder如果接收mask tokens,性能会降低(线性检测降低14%),因此编码器只接收visible tokens,既能提升性能,又能降低计算量,且加速训练。decoder越小/encoder越大,加速越明显,MAE的时间和存储效率使其适合训练大型模型。详细实验配置、结果如上图。
图d实验重建目标方式。实验表明使用normalization(per patch)的效果比不使用更好。对patch执行PCA,然后将前96个主成分作为重构目标,效果并不好。使用BEiT的dVAE作为目标,效果也不太好。
图e实验数据增强方法。实验表明,MAE只使用裁剪增强时就可以表现很好,添加颜色抖动会降低结果。同时发现不使用数据增强,MAE甚至性能更好。对MAE来说,每一个轮次masks的token都不同,随机masking扮演了类似于数据增强的角色。

图f实验不同的掩码采样策略。观察到block掩码策略倾向于删除较大的块(上图中),基于block掩码的MAE在50%的比例下工作得相当好,但在75%的比例下退化。该任务比random采样更难,具有更高的训练损失,重建结果也比较模糊。 其次grid采样(上图右)是一个更容易的任务,具有更低的训练损失。然而,其重建更加尖锐。表示质量较低。故简单random采样最适合MAE,其允许更高的掩蔽率,这提供了更大的加速效益,同时也具有良好的准确性。

上图为训练epoch数量对模型精度的影响。观察到,随着训练时间的延长准确率稳步提高。在1600个epoch训练后,线性检测精度依然没有达到饱和。
对比实验

上图为与先前自监督方法比较了自监督ViT模型的微调结果。对于ViT-B,所有方法的性能都很好,对于ViT-L,方法之间的差距更大。此外,观察到MAE可以轻松扩展,并从更大的模型中显示出稳定的改进。使用ViT-H获得了86.9% 的准确率,将ViT-H微调为448大小,只使用IN1K数据就实现了87.8%的准确率。
与BEiT相比,MAE具有更高的准确性、更简单、更快的计算速度。MAE重建像素,与预测token的BEiT形成对比。

上图为与有监督预训练ViT的比较。
部分微调实验
微调ViT最后几层,同时冻结其他层进行训练实验。

上图显示结果。只微调一个Transformer块就可以将精度从73.5%提高到81.0%,如果只微调最后一个块的一半(其MLP子块),可以得到79.1%的精度。微调一部分块(4或6)可以实现接近完全微调的精度。
与MoCo v3进行比较。MoCo v3具有更高的线性探测精度,但其所有的部分微调结果都比MAE差。当调优4个区块时,差距为2.6%。虽然MAE表示的线性可分性较差,但它们是更强的非线性特征。
迁移学习实验

上图在COCO上对Mask RCNN端到端进行微调,ViT骨干经过调整用于FPN。这种方法应用于上图中的所有条目,指标为目标检测的box AP和实例分割的mask AP。
与有监督的预训练相比,MAE在所有配置下的表现都更好。在较小的ViT-B下,MAE比有监督预训练高2.4个点。对于更大的ViT-L,MAE预训练比有监督预训练高出4.0个点。 基于像素的MAE优于或与基于token的BEiT相当,而MAE更简单、更快,MAE和BEiT都优于MoCo v3, MoCo v3与有监督预训练相当。

上图使用UperNet在ADE20K实例分割任务上进行实验。观察到,MAE预训练比有监督预训练的结果提高了3.7个点。基于像素的MAE也优于基于token的BEiT。

上图为在iNaturalists和Places实验分类任务。在iNat上,MAE方法下随着ViT模型的扩大,精度有了很大的提高,大大超过了之前的最佳结果。在Places上,MAE的性能超过了之前的最佳结果,之前的这些结果通过对数十亿张图像进行预训练获得。

上图实验比较像素和dVAE作为MAE重建目标的结果。虽然使用dVAE token比使用非归一化像素要好,但其在统计上与使用归一化像素相似。表明token化对MAE是不必要的。
鲁棒性评估

上图评估了模型在不同变体的ImageNet验证集上的鲁棒性。使用在原始ImageNet上进行微调的相同模型(表3),并仅在不同的验证集上运行推理。
观察到除IN-C外,MAE在增加模型大小后具有显著的收益。增大图像大小在所有集合中都有帮助,也大大超过了以前的最佳结果。 相比之下,有监督训练的表现要差得多。例如使用ViT-H,MAE预训练在IN-A上比有监督的对应模型好35%。
可视化

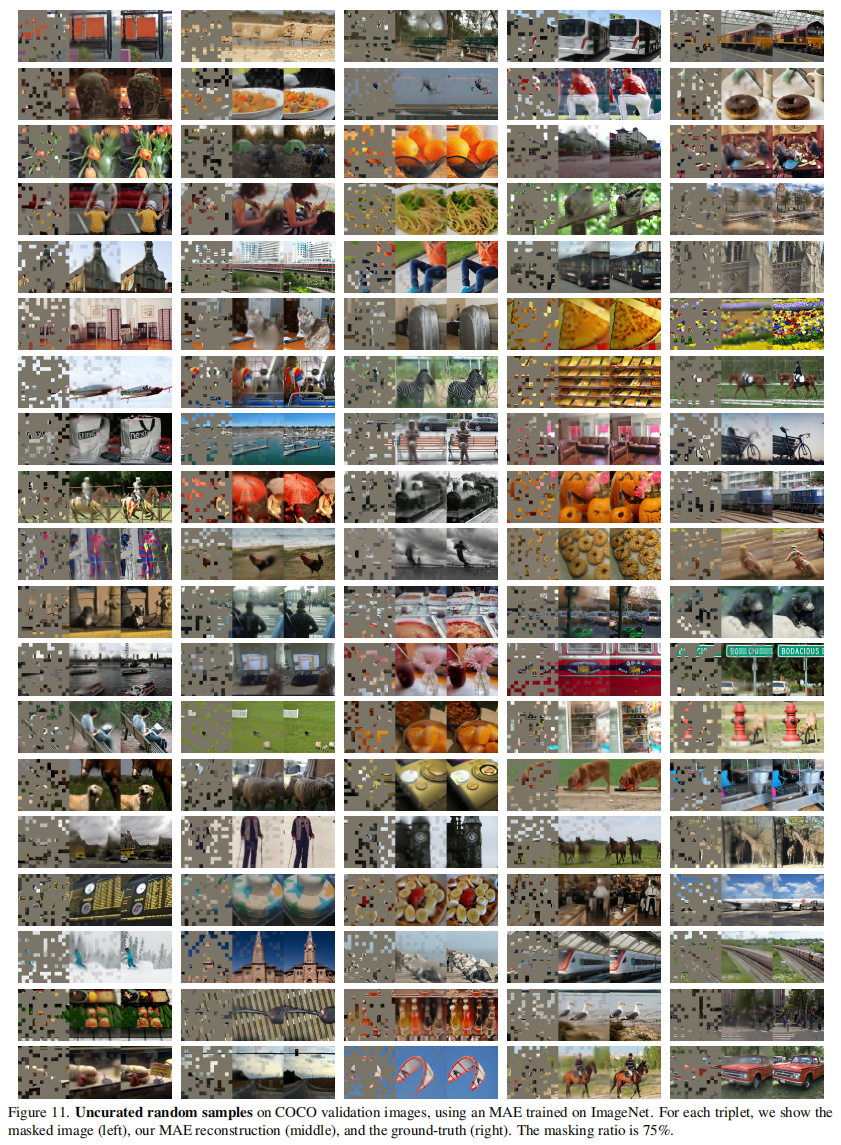
上图显示了在imagenet和COCO上的随机样本重建可视化结果三元组,其中左为掩码图像、中为MAE重建、右为真实值。掩码率为75%。
reference
He, K. , Chen, X. , Xie, S. , Li, Y. , Dollár, Piotr, & Girshick, R. . (2021). Masked autoencoders are scalable vision learners.
这篇关于【论文精读】MAE的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






![[论文笔记]LLM.int8(): 8-bit Matrix Multiplication for Transformers at Scale](https://img-blog.csdnimg.cn/img_convert/172ed0ed26123345e1773ba0e0505cb3.png)

