本文主要是介绍基于stm32单片机智能马桶座便器控制系统Proteus仿真+源程序,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
资料编号:142
一:功能介绍
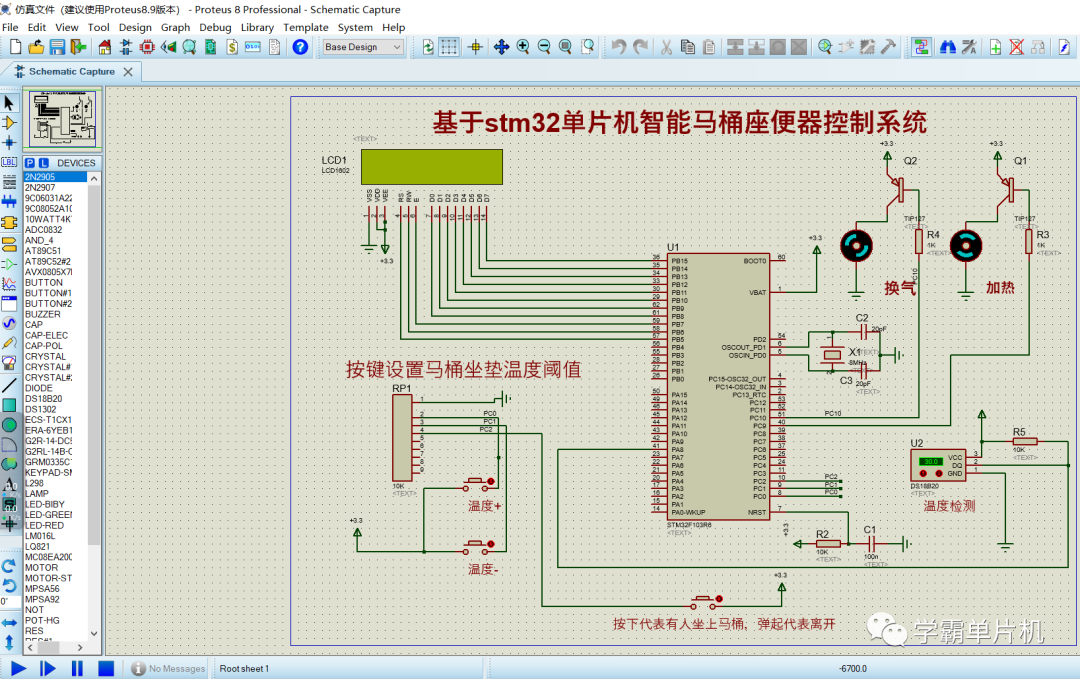
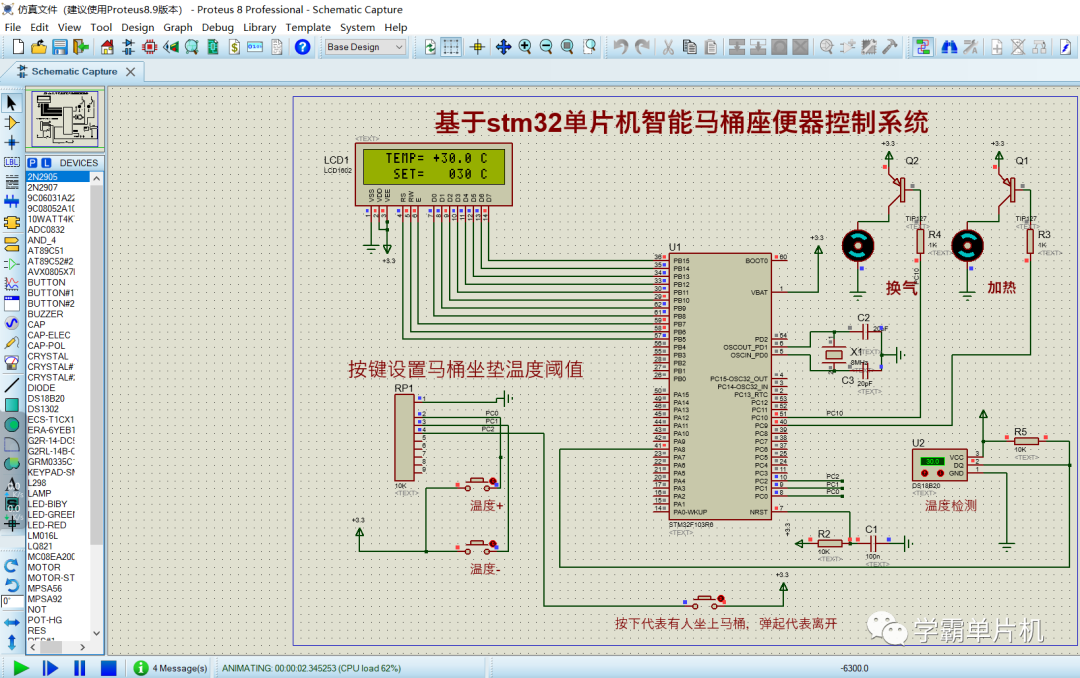
1、采用stm32单片机+LCD1602显示屏+电机+DS18B20温度传感器+按键,制作一个基于stm32单片机智能马桶座便器控制系统Proteus仿真;
2、通过ds18b20传感器测量当前马桶坐垫的实时温度,显示到LCD1602屏幕上面;
3、通过按键设置需求温度,显示到LCD1602屏幕上面;
4、当马桶坐垫温度低于设置值时,坐垫自动开启加热电机,使其温度进行增加;
5、当自锁按键按下时(模拟有人坐上马桶),自动开启抽气电机进行排气换气;
二:仿真演示视频+程序简要讲解:(程序有中文注释,新手容易看懂)
142-基于stm32单片机智能马桶座便器控制系统Proteus仿真+源程序
三:设计软件介绍
本设计使用C语言编程设计,程序代码采用keil5编写,程序有中文注释,新手容易看懂,仿真采用Proteus软件进行仿真,演示视频使用的是Proteus8.9版本;资料包里有相关软件包,可自行下载安装。
四:程序打开方法
特别注意:下载资料包以后一定要先解压!!!(建议解压到桌面上,文件路径太深会导致程序打开异常),解压后再用keil5打开。
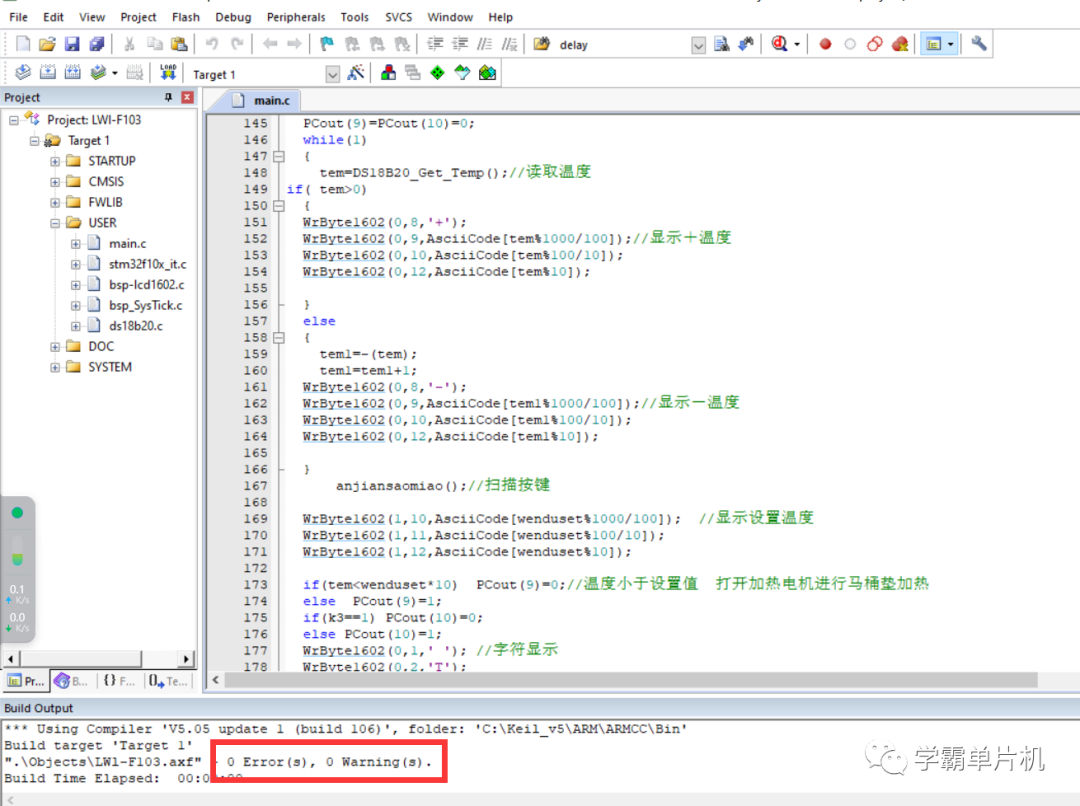
程序部分展示,有中文注释,新手容易看懂
int main(void)
{int t;short tem,tem1;GPIO_Configuration();//初始化 Init1602(); IO_out();delay_init();RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef g;g.GPIO_Mode = GPIO_Mode_Out_PP;g.GPIO_Speed = GPIO_Speed_10MHz;g.GPIO_Pin = GPIO_Pin_8 ;GPIO_Init(GPIOA,&g);GPIO_SetBits(GPIOA,GPIO_Pin_8); //输出1t=DS18B20_DQ_IN;
while(t){DS18B20_IO_OUT(); //SET PG11 OUTPUTDS18B20_DQ_OUT=0; //拉低DQDelay_DS18B20(750); //拉低750usDS18B20_DQ_OUT=1; //DQ=1 Delay_DS18B20(15); //15USDS18B20_IO_IN(); //SET PG11 INPUT Delay_DS18B20(100);t=DS18B20_DQ_IN;}tem=DS18B20_Get_Temp();//读取温度PCout(9)=PCout(10)=0;while(1){tem=DS18B20_Get_Temp();//读取温度
if( tem>0) { WrByte1602(0,8,'+'); WrByte1602(0,9,AsciiCode[tem%1000/100]);//显示+温度WrByte1602(0,10,AsciiCode[tem%100/10]);WrByte1602(0,12,AsciiCode[tem%10]);}else { tem1=-(tem);tem1=tem1+1;WrByte1602(0,8,'-'); WrByte1602(0,9,AsciiCode[tem1%1000/100]);//显示-温度WrByte1602(0,10,AsciiCode[tem1%100/10]);WrByte1602(0,12,AsciiCode[tem1%10]);}anjiansaomiao();//扫描按键 WrByte1602(1,10,AsciiCode[wenduset%1000/100]); //显示设置温度WrByte1602(1,11,AsciiCode[wenduset%100/10]);WrByte1602(1,12,AsciiCode[wenduset%10]);if(tem<wenduset*10) PCout(9)=0;//温度小于设置值 打开加热电机进行马桶垫加热else PCout(9)=1; if(k3==1) PCout(10)=0;else PCout(10)=1;WrByte1602(0,1,' '); //字符显示WrByte1602(0,2,'T'); WrByte1602(0,3,'E'); WrByte1602(0,4,'M'); WrByte1602(0,5,'P'); WrByte1602(0,6,'='); WrByte1602(1,1,' '); //字符显示WrByte1602(1,2,' '); WrByte1602(1,3,'S'); WrByte1602(1,4,'E'); WrByte1602(1,5,'T'); WrByte1602(1,6,'='); WrByte1602(0,11,'.'); WrByte1602(0,14,'C'); WrByte1602(1,14,'C'); }
}五:仿真文件(采用Proteus打开)
六:资料清单展示(文件中包含的相关资料)
资料分享下载链接(可点击)
这篇关于基于stm32单片机智能马桶座便器控制系统Proteus仿真+源程序的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







