本文主要是介绍DDIM模型代码实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
背景
前面已经出了一系列的文章来介绍大模型、多模态、生成模型。这篇文章会从更微观和更贴近实际工作的角度下手。会给大家介绍下前面讲到的diffuiosn model具体怎么来实现。文章结构如下:
1.介绍Diffusion Model包括哪些零部件,这些零部件衔接关系
2.介绍介绍每部分零件的核心代码实现
3.介绍如何把这些零部件挂载到框架变成一个系统
4.小结部分
宏观模型介绍
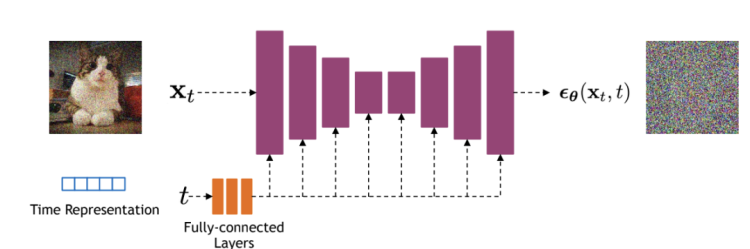
上面的图是Diffusion Model训练过程中,一个step输入、输出、网络结构。
1.输入包括了:
a.代表这是第几个step的Time Representation
b.上图轮合成图
2.预测噪声的网络就是Unet
3.用过sd webui的用户应该对**schedule,如果看上面图,没发现这个**schedule在哪,那这东西是哪个部件呢,这部分李宏毅老师的视频里讲的比较清楚,下面图是从他视频里面截去处来的。
**schedule其实是在一个step中额外加进来的噪声(下图黄色Z)。加这部分原因个人猜测,是对随机生成过程这个生成流程的概率分布假设。如果知识用预测的噪声作为加噪,整个生成的链路就是固定的,只有每个step里面生成分布是符合一定分布的。为了保证生成链路是符合一定分布,加入噪声来做采样,让生成链路不是固定的,而是符合一定概率分布的。

代码实现
1.Time Representation
第几步就是用一个向量来表示,具体实现如下面代码
def timestep_embedding(timesteps, dim, max_period=10000):"""Create sinusoidal timestep embeddings.:param timesteps: a 1-D Tensor of N indices, one per batch element.These may be fractional.:param dim: the dimension of the output.:param max_period: controls the minimum frequency of the embeddings.:return: an [N x dim] Tensor of positional embeddings."""half = dim // 2freqs = th.exp(-math.log(max_period) * th.arange(start=0, end=half, dtype=th.float32) / half).to(device=timesteps.device)args = timesteps[:, None].float() * freqs[None]embedding = th.cat([th.cos(args), th.sin(args)], dim=-1)if dim % 2:embedding = th.cat([embedding, th.zeros_like(embedding[:, :1])], dim=-1)return embeddingtime representation是要输入到unet模型里面的,接在residual block,衔接部分代码如下:
class TimestepBlock(nn.Module):"""Any module where forward() takes timestep embeddings as a second argument."""@abstractmethoddef forward(self, x, emb):"""Apply the module to `x` given `emb` timestep embeddings."""class TimestepEmbedSequential(nn.Sequential, TimestepBlock):"""A sequential module that passes timestep embeddings to the children thatsupport it as an extra input."""def forward(self, x, emb):for layer in self:if isinstance(layer, TimestepBlock):x = layer(x, emb)else:x = layer(x)return x2.Unet:
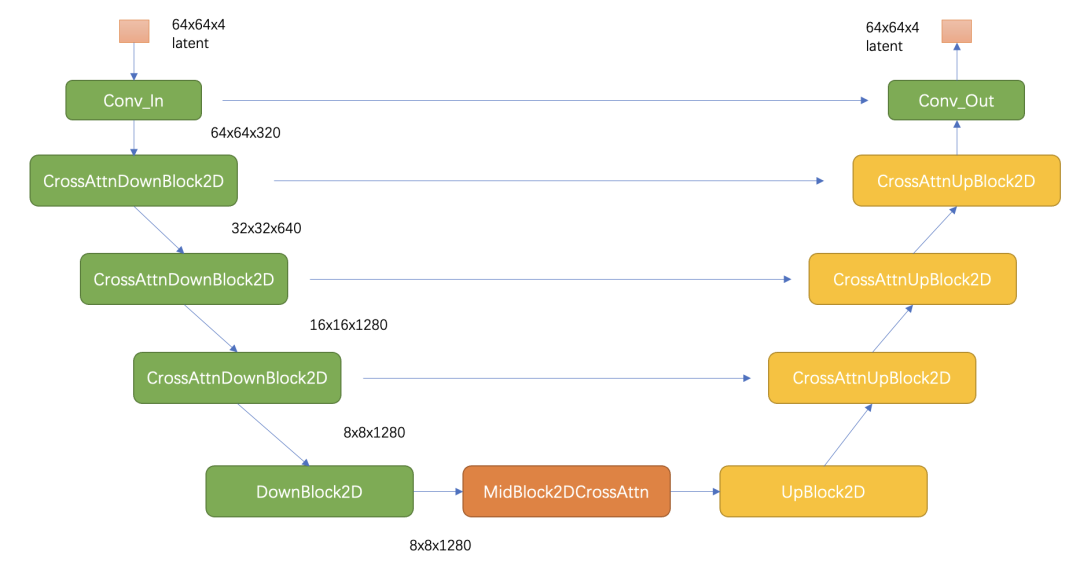
UNet,其主要结构如下图所示(这里以输入的latent为64x64x4维度为例),其中encoder部分包括3个CrossAttnDownBlock2D模块和1个DownBlock2D模块,而decoder部分包括1个UpBlock2D模块和3个CrossAttnUpBlock2D模块,中间还有一个UNetMidBlock2DCrossAttn模块。encoder和decoder两个部分是完全对应的,中间存在skip connection。注意3个CrossAttnDownBlock2D模块最后均有一个2x的downsample操作,而DownBlock2D模块是不包含下采样的。
其中CrossAttnDownBlock2D模块的主要结构如下图所示,text condition将通过CrossAttention模块嵌入进来,此时Attention的query是UNet的中间特征,而key和value则是text embeddings。
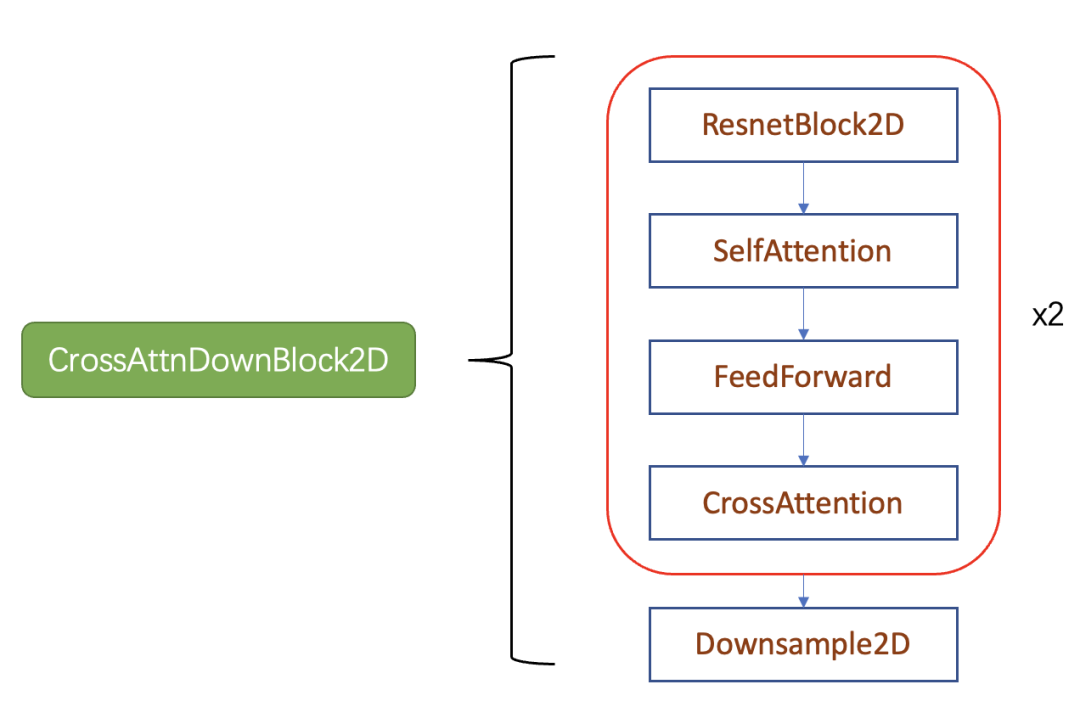
如上图所示,每个cross attention block其实就是time step、图信息融合的模块,这个模块包括了resnet block组件、selfattention组件、feed forward、crossattention组件。下面会具体介绍这些组件如何实现:
U-Net的核心模块是residual block,它包含两个卷积层以及shortcut,同时也要引入time embedding,这里额外定义了一个linear层来将time embedding变换为和特征维度一致,第一conv之后通过加上time embedding来编码time:
class ResBlock(TimestepBlock):"""A residual block that can optionally change the number of channels.:param channels: the number of input channels.:param emb_channels: the number of timestep embedding channels.:param dropout: the rate of dropout.:param out_channels: if specified, the number of out channels.:param use_conv: if True and out_channels is specified, use a spatialconvolution instead of a smaller 1x1 convolution to change thechannels in the skip connection.:param dims: determines if the signal is 1D, 2D, or 3D.:param use_checkpoint: if True, use gradient checkpointing on this module."""def __init__(self,channels,emb_channels,dropout,out_channels=None,use_conv=False,use_scale_shift_norm=False,dims=2,use_checkpoint=False,):super().__init__()self.channels = channelsself.emb_channels = emb_channelsself.dropout = dropoutself.out_channels = out_channels or channelsself.use_conv = use_convself.use_checkpoint = use_checkpointself.use_scale_shift_norm = use_scale_shift_norm#第一层卷积self.in_layers = nn.Sequential(normalization(channels),SiLU(),conv_nd(dims, channels, self.out_channels, 3, padding=1),)#把time step emedding注入进来self.emb_layers = nn.Sequential(SiLU(),linear(emb_channels,2 * self.out_channels if use_scale_shift_norm else self.out_channels,),)#第二层卷积self.out_layers = nn.Sequential(normalization(self.out_channels),SiLU(),nn.Dropout(p=dropout),zero_module(conv_nd(dims, self.out_channels, self.out_channels, 3, padding=1)),)if self.out_channels == channels:self.skip_connection = nn.Identity()elif use_conv:self.skip_connection = conv_nd(dims, channels, self.out_channels, 3, padding=1)else:self.skip_connection = conv_nd(dims, channels, self.out_channels, 1)def forward(self, x, emb):"""Apply the block to a Tensor, conditioned on a timestep embedding.:param x: an [N x C x ...] Tensor of features.:param emb: an [N x emb_channels] Tensor of timestep embeddings.:return: an [N x C x ...] Tensor of outputs."""return checkpoint(self._forward, (x, emb), self.parameters(), self.use_checkpoint)def _forward(self, x, emb):h = self.in_layers(x)emb_out = self.emb_layers(emb).type(h.dtype)while len(emb_out.shape) < len(h.shape):emb_out = emb_out[..., None]if self.use_scale_shift_norm:out_norm, out_rest = self.out_layers[0], self.out_layers[1:]scale, shift = th.chunk(emb_out, 2, dim=1)h = out_norm(h) * (1 + scale) + shifth = out_rest(h)else:h = h + emb_outh = self.out_layers(h)return self.skip_connection(x) + h这里还在部分residual block引入了attention:
class AttentionBlock(nn.Module):"""An attention block that allows spatial positions to attend to each other.Originally ported from here, but adapted to the N-d case.https://github.com/hojonathanho/diffusion/blob/1e0dceb3b3495bbe19116a5e1b3596cd0706c543/diffusion_tf/models/unet.py#L66."""def __init__(self, channels, num_heads=1, use_checkpoint=False):super().__init__()self.channels = channelsself.num_heads = num_headsself.use_checkpoint = use_checkpointself.norm = normalization(channels)self.qkv = conv_nd(1, channels, channels * 3, 1)self.attention = QKVAttention()self.proj_out = zero_module(conv_nd(1, channels, channels, 1))def forward(self, x):return checkpoint(self._forward, (x,), self.parameters(), self.use_checkpoint)def _forward(self, x):b, c, *spatial = x.shapex = x.reshape(b, c, -1)qkv = self.qkv(self.norm(x))qkv = qkv.reshape(b * self.num_heads, -1, qkv.shape[2])h = self.attention(qkv)h = h.reshape(b, -1, h.shape[-1])h = self.proj_out(h)return (x + h).reshape(b, c, *spatial)上采样模块和下采样模块,其分别可以采用插值和stride=2的conv或者pooling来实现:
class Upsample(nn.Module):"""An upsampling layer with an optional convolution.:param channels: channels in the inputs and outputs.:param use_conv: a bool determining if a convolution is applied.:param dims: determines if the signal is 1D, 2D, or 3D. If 3D, thenupsampling occurs in the inner-two dimensions."""def __init__(self, channels, use_conv, dims=2):super().__init__()self.channels = channelsself.use_conv = use_convself.dims = dimsif use_conv:self.conv = conv_nd(dims, channels, channels, 3, padding=1)def forward(self, x):assert x.shape[1] == self.channelsif self.dims == 3:x = F.interpolate(x, (x.shape[2], x.shape[3] * 2, x.shape[4] * 2), mode="nearest")else:x = F.interpolate(x, scale_factor=2, mode="nearest")if self.use_conv:x = self.conv(x)return xclass Downsample(nn.Module):"""A downsampling layer with an optional convolution.:param channels: channels in the inputs and outputs.:param use_conv: a bool determining if a convolution is applied.:param dims: determines if the signal is 1D, 2D, or 3D. If 3D, thendownsampling occurs in the inner-two dimensions."""def __init__(self, channels, use_conv, dims=2):super().__init__()self.channels = channelsself.use_conv = use_convself.dims = dimsstride = 2 if dims != 3 else (1, 2, 2)if use_conv:self.op = conv_nd(dims, channels, channels, 3, stride=stride, padding=1)else:self.op = avg_pool_nd(stride)def forward(self, x):assert x.shape[1] == self.channelsreturn self.op(x)把上面的各组件串起来组成UNet网络:
class UNetModel(nn.Module):"""The full UNet model with attention and timestep embedding.:param in_channels: channels in the input Tensor.:param model_channels: base channel count for the model.:param out_channels: channels in the output Tensor.:param num_res_blocks: number of residual blocks per downsample.:param attention_resolutions: a collection of downsample rates at whichattention will take place. May be a set, list, or tuple.For example, if this contains 4, then at 4x downsampling, attentionwill be used.:param dropout: the dropout probability.:param channel_mult: channel multiplier for each level of the UNet.:param conv_resample: if True, use learned convolutions for upsampling anddownsampling.:param dims: determines if the signal is 1D, 2D, or 3D.:param num_classes: if specified (as an int), then this model will beclass-conditional with `num_classes` classes.:param use_checkpoint: use gradient checkpointing to reduce memory usage.:param num_heads: the number of attention heads in each attention layer."""def __init__(self,in_channels,model_channels,out_channels,num_res_blocks,attention_resolutions,dropout=0,channel_mult=(1, 2, 4, 8),conv_resample=True,dims=2,num_classes=None,use_checkpoint=False,num_heads=1,num_heads_upsample=-1,use_scale_shift_norm=False,):super().__init__()if num_heads_upsample == -1:num_heads_upsample = num_headsself.in_channels = in_channelsself.model_channels = model_channelsself.out_channels = out_channelsself.num_res_blocks = num_res_blocksself.attention_resolutions = attention_resolutionsself.dropout = dropoutself.channel_mult = channel_multself.conv_resample = conv_resampleself.num_classes = num_classesself.use_checkpoint = use_checkpointself.num_heads = num_headsself.num_heads_upsample = num_heads_upsample#time embbdingtime_embed_dim = model_channels * 4self.time_embed = nn.Sequential(linear(model_channels, time_embed_dim),SiLU(),linear(time_embed_dim, time_embed_dim),)if self.num_classes is not None:self.label_emb = nn.Embedding(num_classes, time_embed_dim)#下采样模块self.input_blocks = nn.ModuleList([TimestepEmbedSequential(conv_nd(dims, in_channels, model_channels, 3, padding=1))])input_block_chans = [model_channels]ch = model_channelsds = 1for level, mult in enumerate(channel_mult):for _ in range(num_res_blocks):layers = [ResBlock(ch,time_embed_dim,dropout,out_channels=mult * model_channels,dims=dims,use_checkpoint=use_checkpoint,use_scale_shift_norm=use_scale_shift_norm,)]ch = mult * model_channelsif ds in attention_resolutions:layers.append(AttentionBlock(ch, use_checkpoint=use_checkpoint, num_heads=num_heads))self.input_blocks.append(TimestepEmbedSequential(*layers))input_block_chans.append(ch)if level != len(channel_mult) - 1:self.input_blocks.append(TimestepEmbedSequential(Downsample(ch, conv_resample, dims=dims)))input_block_chans.append(ch)ds *= 2#middle block(就是上面橙色模块,衔接encode和decode的部分)self.middle_block = TimestepEmbedSequential(ResBlock(ch,time_embed_dim,dropout,dims=dims,use_checkpoint=use_checkpoint,use_scale_shift_norm=use_scale_shift_norm,),AttentionBlock(ch, use_checkpoint=use_checkpoint, num_heads=num_heads),ResBlock(ch,time_embed_dim,dropout,dims=dims,use_checkpoint=use_checkpoint,use_scale_shift_norm=use_scale_shift_norm,),)#decode部分,上面图黄色部分self.output_blocks = nn.ModuleList([])for level, mult in list(enumerate(channel_mult))[::-1]:for i in range(num_res_blocks + 1):layers = [ResBlock(ch + input_block_chans.pop(),time_embed_dim,dropout,out_channels=model_channels * mult,dims=dims,use_checkpoint=use_checkpoint,use_scale_shift_norm=use_scale_shift_norm,)]ch = model_channels * multif ds in attention_resolutions:layers.append(AttentionBlock(ch,use_checkpoint=use_checkpoint,num_heads=num_heads_upsample,))if level and i == num_res_blocks:layers.append(Upsample(ch, conv_resample, dims=dims))ds //= 2self.output_blocks.append(TimestepEmbedSequential(*layers))self.out = nn.Sequential(normalization(ch),SiLU(),zero_module(conv_nd(dims, model_channels, out_channels, 3, padding=1)),)
3.schedule
针对每个step的训练,网络架构上看就差一个产生过程随机的schedule,下图黄色部分:

def get_named_beta_schedule(schedule_name, num_diffusion_timesteps):"""Get a pre-defined beta schedule for the given name.The beta schedule library consists of beta schedules which remain similarin the limit of num_diffusion_timesteps.Beta schedules may be added, but should not be removed or changed oncethey are committed to maintain backwards compatibility."""if schedule_name == "linear":# Linear schedule from Ho et al, extended to work for any number of# diffusion steps.scale = 1000 / num_diffusion_timestepsbeta_start = scale * 0.0001beta_end = scale * 0.02return np.linspace(beta_start, beta_end, num_diffusion_timesteps, dtype=np.float64)elif schedule_name == "cosine":return betas_for_alpha_bar(num_diffusion_timesteps,lambda t: math.cos((t + 0.008) / 1.008 * math.pi / 2) ** 2,)else:raise NotImplementedError(f"unknown beta schedule: {schedule_name}")def betas_for_alpha_bar(num_diffusion_timesteps, alpha_bar, max_beta=0.999):"""Create a beta schedule that discretizes the given alpha_t_bar function,which defines the cumulative product of (1-beta) over time from t = [0,1].:param num_diffusion_timesteps: the number of betas to produce.:param alpha_bar: a lambda that takes an argument t from 0 to 1 andproduces the cumulative product of (1-beta) up to thatpart of the diffusion process.:param max_beta: the maximum beta to use; use values lower than 1 toprevent singularities."""betas = []for i in range(num_diffusion_timesteps):t1 = i / num_diffusion_timestepst2 = (i + 1) / num_diffusion_timestepsbetas.append(min(1 - alpha_bar(t2) / alpha_bar(t1), max_beta))return np.array(betas)4.从一个step到多step
上面其实只是一个diffusion model的一个step过程,diffusion包含的是一个多step的随机过程,这部分的衔接代码如下。
class GaussianDiffusion:"""Utilities for training and sampling diffusion models.Ported directly from here, and then adapted over time to further experimentation.https://github.com/hojonathanho/diffusion/blob/1e0dceb3b3495bbe19116a5e1b3596cd0706c543/diffusion_tf/diffusion_utils_2.py#L42:param betas: a 1-D numpy array of betas for each diffusion timestep,starting at T and going to 1.:param model_mean_type: a ModelMeanType determining what the model outputs.:param model_var_type: a ModelVarType determining how variance is output.:param loss_type: a LossType determining the loss function to use.:param rescale_timesteps: if True, pass floating point timesteps into themodel so that they are always scaled like in theoriginal paper (0 to 1000)."""def __init__(self,*,betas,model_mean_type,model_var_type,loss_type,rescale_timesteps=False,):self.model_mean_type = model_mean_typeself.model_var_type = model_var_typeself.loss_type = loss_typeself.rescale_timesteps = rescale_timesteps# Use float64 for accuracy.betas = np.array(betas, dtype=np.float64)self.betas = betasassert len(betas.shape) == 1, "betas must be 1-D"assert (betas > 0).all() and (betas <= 1).all()self.num_timesteps = int(betas.shape[0])alphas = 1.0 - betasself.alphas_cumprod = np.cumprod(alphas, axis=0)self.alphas_cumprod_prev = np.append(1.0, self.alphas_cumprod[:-1])self.alphas_cumprod_next = np.append(self.alphas_cumprod[1:], 0.0)assert self.alphas_cumprod_prev.shape == (self.num_timesteps,)# calculations for diffusion q(x_t | x_{t-1}) and othersself.sqrt_alphas_cumprod = np.sqrt(self.alphas_cumprod)self.sqrt_one_minus_alphas_cumprod = np.sqrt(1.0 - self.alphas_cumprod)self.log_one_minus_alphas_cumprod = np.log(1.0 - self.alphas_cumprod)self.sqrt_recip_alphas_cumprod = np.sqrt(1.0 / self.alphas_cumprod)self.sqrt_recipm1_alphas_cumprod = np.sqrt(1.0 / self.alphas_cumprod - 1)# calculations for posterior q(x_{t-1} | x_t, x_0)self.posterior_variance = (betas * (1.0 - self.alphas_cumprod_prev) / (1.0 - self.alphas_cumprod))# log calculation clipped because the posterior variance is 0 at the# beginning of the diffusion chain.self.posterior_log_variance_clipped = np.log(np.append(self.posterior_variance[1], self.posterior_variance[1:]))self.posterior_mean_coef1 = (betas * np.sqrt(self.alphas_cumprod_prev) / (1.0 - self.alphas_cumprod))self.posterior_mean_coef2 = ((1.0 - self.alphas_cumprod_prev)* np.sqrt(alphas)/ (1.0 - self.alphas_cumprod))def q_mean_variance(self, x_start, t):"""Get the distribution q(x_t | x_0).:param x_start: the [N x C x ...] tensor of noiseless inputs.:param t: the number of diffusion steps (minus 1). Here, 0 means one step.:return: A tuple (mean, variance, log_variance), all of x_start's shape."""mean = (_extract_into_tensor(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start)variance = _extract_into_tensor(1.0 - self.alphas_cumprod, t, x_start.shape)log_variance = _extract_into_tensor(self.log_one_minus_alphas_cumprod, t, x_start.shape)return mean, variance, log_variancedef q_sample(self, x_start, t, noise=None):"""Diffuse the data for a given number of diffusion steps.In other words, sample from q(x_t | x_0).:param x_start: the initial data batch.:param t: the number of diffusion steps (minus 1). Here, 0 means one step.:param noise: if specified, the split-out normal noise.:return: A noisy version of x_start."""if noise is None:noise = th.randn_like(x_start)assert noise.shape == x_start.shapereturn (_extract_into_tensor(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start+ _extract_into_tensor(self.sqrt_one_minus_alphas_cumprod, t, x_start.shape)* noise)def q_posterior_mean_variance(self, x_start, x_t, t):"""Compute the mean and variance of the diffusion posterior:q(x_{t-1} | x_t, x_0)"""assert x_start.shape == x_t.shapeposterior_mean = (_extract_into_tensor(self.posterior_mean_coef1, t, x_t.shape) * x_start+ _extract_into_tensor(self.posterior_mean_coef2, t, x_t.shape) * x_t)posterior_variance = _extract_into_tensor(self.posterior_variance, t, x_t.shape)posterior_log_variance_clipped = _extract_into_tensor(self.posterior_log_variance_clipped, t, x_t.shape)assert (posterior_mean.shape[0]== posterior_variance.shape[0]== posterior_log_variance_clipped.shape[0]== x_start.shape[0])return posterior_mean, posterior_variance, posterior_log_variance_clippeddef p_mean_variance(self, model, x, t, clip_denoised=True, denoised_fn=None, model_kwargs=None):"""Apply the model to get p(x_{t-1} | x_t), as well as a prediction ofthe initial x, x_0.:param model: the model, which takes a signal and a batch of timestepsas input.:param x: the [N x C x ...] tensor at time t.:param t: a 1-D Tensor of timesteps.:param clip_denoised: if True, clip the denoised signal into [-1, 1].:param denoised_fn: if not None, a function which applies to thex_start prediction before it is used to sample. Applies beforeclip_denoised.:param model_kwargs: if not None, a dict of extra keyword arguments topass to the model. This can be used for conditioning.:return: a dict with the following keys:- 'mean': the model mean output.- 'variance': the model variance output.- 'log_variance': the log of 'variance'.- 'pred_xstart': the prediction for x_0."""if model_kwargs is None:model_kwargs = {}B, C = x.shape[:2]assert t.shape == (B,)model_output = model(x, self._scale_timesteps(t), **model_kwargs)if self.model_var_type in [ModelVarType.LEARNED, ModelVarType.LEARNED_RANGE]:assert model_output.shape == (B, C * 2, *x.shape[2:])model_output, model_var_values = th.split(model_output, C, dim=1)if self.model_var_type == ModelVarType.LEARNED:model_log_variance = model_var_valuesmodel_variance = th.exp(model_log_variance)else:min_log = _extract_into_tensor(self.posterior_log_variance_clipped, t, x.shape)max_log = _extract_into_tensor(np.log(self.betas), t, x.shape)# The model_var_values is [-1, 1] for [min_var, max_var].frac = (model_var_values + 1) / 2model_log_variance = frac * max_log + (1 - frac) * min_logmodel_variance = th.exp(model_log_variance)else:model_variance, model_log_variance = {# for fixedlarge, we set the initial (log-)variance like so# to get a better decoder log likelihood.ModelVarType.FIXED_LARGE: (np.append(self.posterior_variance[1], self.betas[1:]),np.log(np.append(self.posterior_variance[1], self.betas[1:])),),ModelVarType.FIXED_SMALL: (self.posterior_variance,self.posterior_log_variance_clipped,),}[self.model_var_type]model_variance = _extract_into_tensor(model_variance, t, x.shape)model_log_variance = _extract_into_tensor(model_log_variance, t, x.shape)def process_xstart(x):if denoised_fn is not None:x = denoised_fn(x)if clip_denoised:return x.clamp(-1, 1)return xif self.model_mean_type == ModelMeanType.PREVIOUS_X:pred_xstart = process_xstart(self._predict_xstart_from_xprev(x_t=x, t=t, xprev=model_output))model_mean = model_outputelif self.model_mean_type in [ModelMeanType.START_X, ModelMeanType.EPSILON]:if self.model_mean_type == ModelMeanType.START_X:pred_xstart = process_xstart(model_output)else:pred_xstart = process_xstart(self._predict_xstart_from_eps(x_t=x, t=t, eps=model_output))model_mean, _, _ = self.q_posterior_mean_variance(x_start=pred_xstart, x_t=x, t=t)else:raise NotImplementedError(self.model_mean_type)assert (model_mean.shape == model_log_variance.shape == pred_xstart.shape == x.shape)return {"mean": model_mean,"variance": model_variance,"log_variance": model_log_variance,"pred_xstart": pred_xstart,}def _predict_xstart_from_eps(self, x_t, t, eps):assert x_t.shape == eps.shapereturn (_extract_into_tensor(self.sqrt_recip_alphas_cumprod, t, x_t.shape) * x_t- _extract_into_tensor(self.sqrt_recipm1_alphas_cumprod, t, x_t.shape) * eps)def _predict_xstart_from_xprev(self, x_t, t, xprev):assert x_t.shape == xprev.shapereturn ( # (xprev - coef2*x_t) / coef1_extract_into_tensor(1.0 / self.posterior_mean_coef1, t, x_t.shape) * xprev- _extract_into_tensor(self.posterior_mean_coef2 / self.posterior_mean_coef1, t, x_t.shape)* x_t)def _predict_eps_from_xstart(self, x_t, t, pred_xstart):return (_extract_into_tensor(self.sqrt_recip_alphas_cumprod, t, x_t.shape) * x_t- pred_xstart) / _extract_into_tensor(self.sqrt_recipm1_alphas_cumprod, t, x_t.shape)def _scale_timesteps(self, t):if self.rescale_timesteps:return t.float() * (1000.0 / self.num_timesteps)return tdef p_sample(self, model, x, t, clip_denoised=True, denoised_fn=None, model_kwargs=None):"""Sample x_{t-1} from the model at the given timestep.:param model: the model to sample from.:param x: the current tensor at x_{t-1}.:param t: the value of t, starting at 0 for the first diffusion step.:param clip_denoised: if True, clip the x_start prediction to [-1, 1].:param denoised_fn: if not None, a function which applies to thex_start prediction before it is used to sample.:param model_kwargs: if not None, a dict of extra keyword arguments topass to the model. This can be used for conditioning.:return: a dict containing the following keys:- 'sample': a random sample from the model.- 'pred_xstart': a prediction of x_0."""out = self.p_mean_variance(model,x,t,clip_denoised=clip_denoised,denoised_fn=denoised_fn,model_kwargs=model_kwargs,)noise = th.randn_like(x)nonzero_mask = ((t != 0).float().view(-1, *([1] * (len(x.shape) - 1)))) # no noise when t == 0sample = out["mean"] + nonzero_mask * th.exp(0.5 * out["log_variance"]) * noisereturn {"sample": sample, "pred_xstart": out["pred_xstart"]}def p_sample_loop(self,model,shape,noise=None,clip_denoised=True,denoised_fn=None,model_kwargs=None,device=None,progress=False,):"""Generate samples from the model.:param model: the model module.:param shape: the shape of the samples, (N, C, H, W).:param noise: if specified, the noise from the encoder to sample.Should be of the same shape as `shape`.:param clip_denoised: if True, clip x_start predictions to [-1, 1].:param denoised_fn: if not None, a function which applies to thex_start prediction before it is used to sample.:param model_kwargs: if not None, a dict of extra keyword arguments topass to the model. This can be used for conditioning.:param device: if specified, the device to create the samples on.If not specified, use a model parameter's device.:param progress: if True, show a tqdm progress bar.:return: a non-differentiable batch of samples."""final = Nonefor sample in self.p_sample_loop_progressive(model,shape,noise=noise,clip_denoised=clip_denoised,denoised_fn=denoised_fn,model_kwargs=model_kwargs,device=device,progress=progress,):final = samplereturn final["sample"]def p_sample_loop_progressive(self,model,shape,noise=None,clip_denoised=True,denoised_fn=None,model_kwargs=None,device=None,progress=False,):"""Generate samples from the model and yield intermediate samples fromeach timestep of diffusion.Arguments are the same as p_sample_loop().Returns a generator over dicts, where each dict is the return value ofp_sample()."""if device is None:device = next(model.parameters()).deviceassert isinstance(shape, (tuple, list))if noise is not None:img = noiseelse:img = th.randn(*shape, device=device)indices = list(range(self.num_timesteps))[::-1]if progress:# Lazy import so that we don't depend on tqdm.from tqdm.auto import tqdmindices = tqdm(indices)for i in indices:t = th.tensor([i] * shape[0], device=device)with th.no_grad():out = self.p_sample(model,img,t,clip_denoised=clip_denoised,denoised_fn=denoised_fn,model_kwargs=model_kwargs,)yield outimg = out["sample"]def ddim_sample(self,model,x,t,clip_denoised=True,denoised_fn=None,model_kwargs=None,eta=0.0,):"""Sample x_{t-1} from the model using DDIM.Same usage as p_sample()."""out = self.p_mean_variance(model,x,t,clip_denoised=clip_denoised,denoised_fn=denoised_fn,model_kwargs=model_kwargs,)# Usually our model outputs epsilon, but we re-derive it# in case we used x_start or x_prev prediction.eps = self._predict_eps_from_xstart(x, t, out["pred_xstart"])alpha_bar = _extract_into_tensor(self.alphas_cumprod, t, x.shape)alpha_bar_prev = _extract_into_tensor(self.alphas_cumprod_prev, t, x.shape)sigma = (eta* th.sqrt((1 - alpha_bar_prev) / (1 - alpha_bar))* th.sqrt(1 - alpha_bar / alpha_bar_prev))# Equation 12.noise = th.randn_like(x)mean_pred = (out["pred_xstart"] * th.sqrt(alpha_bar_prev)+ th.sqrt(1 - alpha_bar_prev - sigma ** 2) * eps)nonzero_mask = ((t != 0).float().view(-1, *([1] * (len(x.shape) - 1)))) # no noise when t == 0sample = mean_pred + nonzero_mask * sigma * noisereturn {"sample": sample, "pred_xstart": out["pred_xstart"]}def ddim_reverse_sample(self,model,x,t,clip_denoised=True,denoised_fn=None,model_kwargs=None,eta=0.0,):"""Sample x_{t+1} from the model using DDIM reverse ODE."""assert eta == 0.0, "Reverse ODE only for deterministic path"out = self.p_mean_variance(model,x,t,clip_denoised=clip_denoised,denoised_fn=denoised_fn,model_kwargs=model_kwargs,)# Usually our model outputs epsilon, but we re-derive it# in case we used x_start or x_prev prediction.eps = (_extract_into_tensor(self.sqrt_recip_alphas_cumprod, t, x.shape) * x- out["pred_xstart"]) / _extract_into_tensor(self.sqrt_recipm1_alphas_cumprod, t, x.shape)alpha_bar_next = _extract_into_tensor(self.alphas_cumprod_next, t, x.shape)# Equation 12. reversedmean_pred = (out["pred_xstart"] * th.sqrt(alpha_bar_next)+ th.sqrt(1 - alpha_bar_next) * eps)return {"sample": mean_pred, "pred_xstart": out["pred_xstart"]}def ddim_sample_loop(self,model,shape,noise=None,clip_denoised=True,denoised_fn=None,model_kwargs=None,device=None,progress=False,eta=0.0,):"""Generate samples from the model using DDIM.Same usage as p_sample_loop()."""final = Nonefor sample in self.ddim_sample_loop_progressive(model,shape,noise=noise,clip_denoised=clip_denoised,denoised_fn=denoised_fn,model_kwargs=model_kwargs,device=device,progress=progress,eta=eta,):final = samplereturn final["sample"]def ddim_sample_loop_progressive(self,model,shape,noise=None,clip_denoised=True,denoised_fn=None,model_kwargs=None,device=None,progress=False,eta=0.0,):"""Use DDIM to sample from the model and yield intermediate samples fromeach timestep of DDIM.Same usage as p_sample_loop_progressive()."""if device is None:device = next(model.parameters()).deviceassert isinstance(shape, (tuple, list))if noise is not None:img = noiseelse:img = th.randn(*shape, device=device)indices = list(range(self.num_timesteps))[::-1]if progress:# Lazy import so that we don't depend on tqdm.from tqdm.auto import tqdmindices = tqdm(indices)for i in indices:t = th.tensor([i] * shape[0], device=device)with th.no_grad():out = self.ddim_sample(model,img,t,clip_denoised=clip_denoised,denoised_fn=denoised_fn,model_kwargs=model_kwargs,eta=eta,)yield outimg = out["sample"]def _vb_terms_bpd(self, model, x_start, x_t, t, clip_denoised=True, model_kwargs=None):"""Get a term for the variational lower-bound.The resulting units are bits (rather than nats, as one might expect).This allows for comparison to other papers.:return: a dict with the following keys:- 'output': a shape [N] tensor of NLLs or KLs.- 'pred_xstart': the x_0 predictions."""true_mean, _, true_log_variance_clipped = self.q_posterior_mean_variance(x_start=x_start, x_t=x_t, t=t)out = self.p_mean_variance(model, x_t, t, clip_denoised=clip_denoised, model_kwargs=model_kwargs)kl = normal_kl(true_mean, true_log_variance_clipped, out["mean"], out["log_variance"])kl = mean_flat(kl) / np.log(2.0)decoder_nll = -discretized_gaussian_log_likelihood(x_start, means=out["mean"], log_scales=0.5 * out["log_variance"])assert decoder_nll.shape == x_start.shapedecoder_nll = mean_flat(decoder_nll) / np.log(2.0)# At the first timestep return the decoder NLL,# otherwise return KL(q(x_{t-1}|x_t,x_0) || p(x_{t-1}|x_t))output = th.where((t == 0), decoder_nll, kl)return {"output": output, "pred_xstart": out["pred_xstart"]}def training_losses(self, model, x_start, t, model_kwargs=None, noise=None):"""Compute training losses for a single timestep.:param model: the model to evaluate loss on.:param x_start: the [N x C x ...] tensor of inputs.:param t: a batch of timestep indices.:param model_kwargs: if not None, a dict of extra keyword arguments topass to the model. This can be used for conditioning.:param noise: if specified, the specific Gaussian noise to try to remove.:return: a dict with the key "loss" containing a tensor of shape [N].Some mean or variance settings may also have other keys."""if model_kwargs is None:model_kwargs = {}if noise is None:noise = th.randn_like(x_start)x_t = self.q_sample(x_start, t, noise=noise)terms = {}if self.loss_type == LossType.KL or self.loss_type == LossType.RESCALED_KL:terms["loss"] = self._vb_terms_bpd(model=model,x_start=x_start,x_t=x_t,t=t,clip_denoised=False,model_kwargs=model_kwargs,)["output"]if self.loss_type == LossType.RESCALED_KL:terms["loss"] *= self.num_timestepselif self.loss_type == LossType.MSE or self.loss_type == LossType.RESCALED_MSE:model_output = model(x_t, self._scale_timesteps(t), **model_kwargs)if self.model_var_type in [ModelVarType.LEARNED,ModelVarType.LEARNED_RANGE,]:B, C = x_t.shape[:2]assert model_output.shape == (B, C * 2, *x_t.shape[2:])model_output, model_var_values = th.split(model_output, C, dim=1)# Learn the variance using the variational bound, but don't let# it affect our mean prediction.frozen_out = th.cat([model_output.detach(), model_var_values], dim=1)terms["vb"] = self._vb_terms_bpd(model=lambda *args, r=frozen_out: r,x_start=x_start,x_t=x_t,t=t,clip_denoised=False,)["output"]if self.loss_type == LossType.RESCALED_MSE:# Divide by 1000 for equivalence with initial implementation.# Without a factor of 1/1000, the VB term hurts the MSE term.terms["vb"] *= self.num_timesteps / 1000.0target = {ModelMeanType.PREVIOUS_X: self.q_posterior_mean_variance(x_start=x_start, x_t=x_t, t=t)[0],ModelMeanType.START_X: x_start,ModelMeanType.EPSILON: noise,}[self.model_mean_type]assert model_output.shape == target.shape == x_start.shapeterms["mse"] = mean_flat((target - model_output) ** 2)if "vb" in terms:terms["loss"] = terms["mse"] + terms["vb"]else:terms["loss"] = terms["mse"]else:raise NotImplementedError(self.loss_type)return terms其中几个主要的函数总结如下:

这部分代码其实就是把流程,和上面的公式做实现
- q_sample:实现的从x0到xt扩散过程;
- q_posterior_mean_variance:实现的是后验分布的均值和方差的计算公式;
- predict_start_from_noise:q_sample的逆过程,根据预测的噪音来生成;
- p_mean_variance:根据预测的噪音来计算的均值和方差;
- p_sample:单个去噪step;
- p_sample_loop:整个去噪音过程,即生成过程。
5.损失函数定义
论文loss是每个step中,真实加入的噪声和训练网络预测的噪声差值最小化。openai开源实现代码是计算实际噪声loss分布和预测噪声loss的kl散度。

def normal_kl(mean1, logvar1, mean2, logvar2):"""Compute the KL divergence between two gaussians.Shapes are automatically broadcasted, so batches can be compared toscalars, among other use cases."""tensor = Nonefor obj in (mean1, logvar1, mean2, logvar2):if isinstance(obj, th.Tensor):tensor = objbreakassert tensor is not None, "at least one argument must be a Tensor"# Force variances to be Tensors. Broadcasting helps convert scalars to# Tensors, but it does not work for th.exp().logvar1, logvar2 = [x if isinstance(x, th.Tensor) else th.tensor(x).to(tensor)for x in (logvar1, logvar2)]return 0.5 * (-1.0+ logvar2- logvar1+ th.exp(logvar1 - logvar2)+ ((mean1 - mean2) ** 2) * th.exp(-logvar2))6.串接训练流程
def main():args = create_argparser().parse_args()dist_util.setup_dist()logger.configure()logger.log("creating model and diffusion...")model, diffusion = create_model_and_diffusion(**args_to_dict(args, model_and_diffusion_defaults().keys()))model.to(dist_util.dev())schedule_sampler = create_named_schedule_sampler(args.schedule_sampler, diffusion)logger.log("creating data loader...")data = load_data(data_dir=args.data_dir,batch_size=args.batch_size,image_size=args.image_size,class_cond=args.class_cond,)logger.log("training...")TrainLoop(model=model,diffusion=diffusion,data=data,batch_size=args.batch_size,microbatch=args.microbatch,lr=args.lr,ema_rate=args.ema_rate,log_interval=args.log_interval,save_interval=args.save_interval,resume_checkpoint=args.resume_checkpoint,use_fp16=args.use_fp16,fp16_scale_growth=args.fp16_scale_growth,schedule_sampler=schedule_sampler,weight_decay=args.weight_decay,lr_anneal_steps=args.lr_anneal_steps,).run_loop()小结
1.把DDIM模型做了实现层面的介绍
2.把具体实现代码和推导细节对应
3.代码学习是为了后面sd模型打基础
4.甚至是为了后续改模型架构,增加更多特征信息作铺垫
这篇关于DDIM模型代码实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





