本文主要是介绍CMU 10-414/714: Deep Learning Systems --hw3,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
实现功能
- 在
ndarray.py文件中完成一些python array操作- 我们实现的NDArray底层存储就是一个一维向量,只不过会有一些额外的属性(如shape、strides)来表明这个flat array在维度上的分布。底层运算(如加法、矩阵乘法)都是用C++写的,以便达到理论上的最高速度。但像转置、broadcasting、矩阵求子阵等操作都可以在python框架里通过简单的调整array的属性(如strides)来实现
- 实现的python array功能:这四个功能都不需要重新分配内存,而是在原array的基础上修改shape/strides/etc来实现一些变形(除了第四个__getitem__(),它并不修改array的形状)
- reshape(new_shape):调用as_strided(new_shape, strides),再调用make(new_shape, strides, device=self.device, handle=self._handle)。(其中as_strided会额外检查一下shape的长度是否等于strides的长度,strides的数值是通过self.compact_strides(new_shape)算出来的)
- permute(new_axes):调换array的维度顺序。按照new_axes的顺序调换self.strides以及self.shape得到new_shape和new_strides,最后再调用self.as_strided"(new_shape, new_strides)
- broadcast_to():对于原shape中为1的维度,将其步幅设为0,然后调用as_strided(new_shape, new_strides),然后as_strided调用make(new_shape, new_strides, device=self.device, handle=self._handle)。即重新make,修改其中的shape和stride,但内存位置不变(即handle不变)。至于这里将stride部分设为0,猜测更底层有代码处理这里,但我目前还没找到
- __getitem__(idxs):这是一个非常好的理解我们所实现的NDArray的例子,前面也说了,底层的array存储就是一个一维向量,是通过shape、stride、offset这些属性来指示该向量的维度的。本例就是在原array的基础上求子矩阵,且不改变其内存位置,就是通过一系列计算得到新的new_offset、new_shape、new_stride,就可以将原本的大矩阵重新解释成一个小矩阵。图示如下
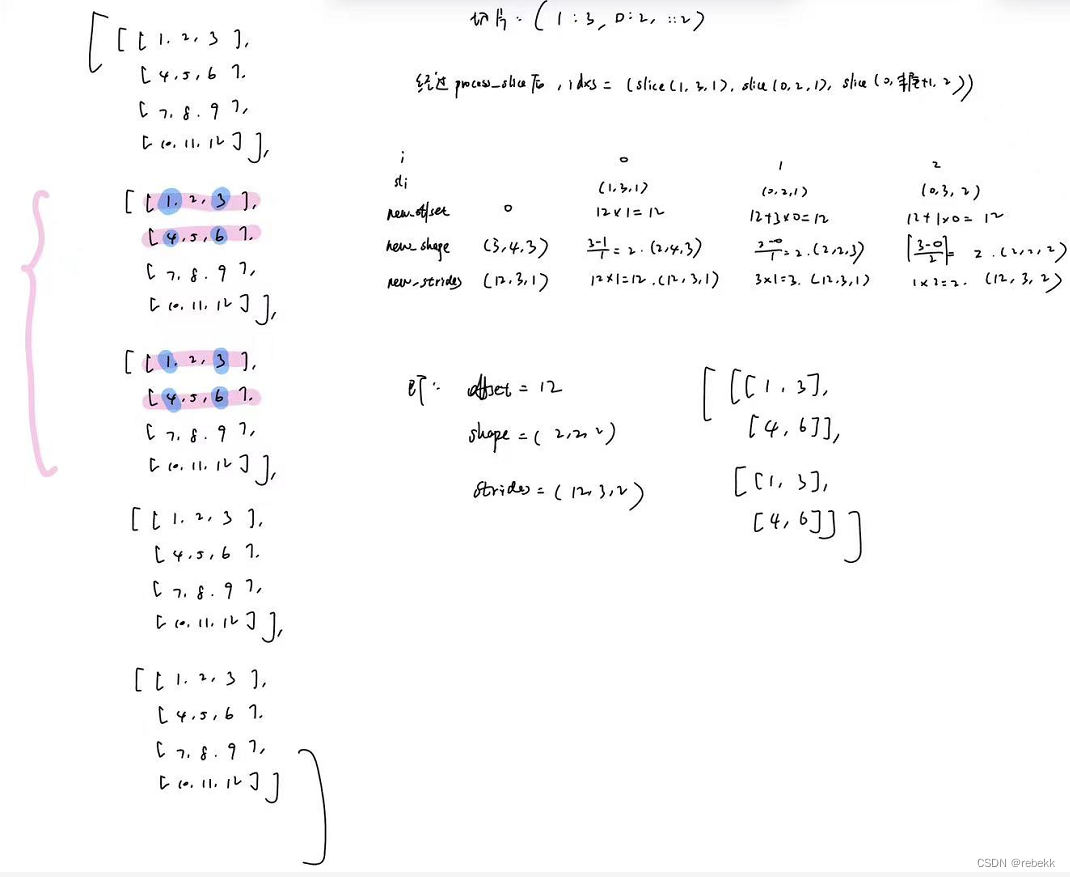
而这里也天然解释了什么是紧凑型(compact)矩阵和非紧凑型矩阵:上述原矩阵就是紧凑型的,切片后形成的蓝底矩阵就是非紧凑型的。
而这也带出了下一个问题:如何选择原矩阵的一个子矩阵进行修改内容。因为本课程中几乎所有setitem操作都会先调用.compact(),而这会导致从原矩阵中copy子矩阵到一个新的内存空间,这显然不是__setitem__()所期望的,因此要大动干戈。
- 【CPU】compact和setitem
其实这里的实现主要就是根据这个原理:out[cnt++] = in[strides[0]*i + strides[1]*j + strides[2]*k];(这里是按三维矩阵算的,下面的代码通过while循环可以扩展到其他维度)- Compact:就是将原来的非紧凑型矩阵a变成紧凑型矩阵out,具体是根据输入的shape、strides、offset(以a为主体确定的),将a中的子矩阵提出来,将各位置的值赋给另一个矩阵out。下面的mode是INDEX_IN,即调用
_strided_index_setter(&a, out, shape, strides, offset, INDEX_IN);// 从后往前每一个维度,都根据该维度的步长、offset以及循环次数来确定本次要copy矩阵a的哪一个元素 // 其实就是根据strides、offset来确定一维下的index void _strided_index_setter(const AlignedArray* a, AlignedArray* out, std::vector<uint32_t> shape,std::vector<uint32_t> strides, size_t offset, strided_index_mode mode, int val=-1) {int depth = shape.size();std::vector<uint32_t> loop(depth, 0);int cnt = 0;while (true) {// inner loopint index = offset;for (int i = 0; i < depth; i++) {index += strides[i] * loop[i];}switch (mode) {case INDEX_OUT: out->ptr[index] = a->ptr[cnt++]; break;case INDEX_IN: out->ptr[cnt++] = a->ptr[index]; break;case SET_VAL: out->ptr[index] = val; break;}// incrementloop[depth - 1]++;// carryint idx = depth - 1;while (loop[idx] == shape[idx]) {if (idx == 0) {// overflowreturn;}loop[idx--] = 0;loop[idx]++;}} } - EwiseSetitem(a, out, shape, strides, offset):这里a是紧凑型矩阵,out是一个非紧凑行矩阵,需要将a的各元素的值赋给out的指定位置上(根据shape、strides、offset确定)。只需要复用上面的代码,将mode改为INDEX_OUT,即调用
_strided_index_setter(&a, out, shape, strides, offset, INDEX_OUT); - ScalarSetitem(size, val, out, shape, strides, offset):out是一个非紧凑型子矩阵,根据shape、strides、offset在out的对应位置将值写为val,即调用
_strided_index_setter(nullptr, out, shape, strides, offset, SET_VAL, val);
- Compact:就是将原来的非紧凑型矩阵a变成紧凑型矩阵out,具体是根据输入的shape、strides、offset(以a为主体确定的),将a中的子矩阵提出来,将各位置的值赋给另一个矩阵out。下面的mode是INDEX_IN,即调用
- 【CPU】Elementwise和scalar操作
这个就非常简单了,根据矩阵的size属性遍历其每个元素即可 - 【CPU】Reductions
这个也很简单,条件是矩阵的底层存储都是一维、行优先的。这类里有两个函数:ReduceSum和ReduceMax,其参数都是原矩阵a、输出矩阵out、reduce_size,其中a.size = out.size * reduce_size。看代码就懂了- ReduceMax:
void ReduceMax(const AlignedArray& a, AlignedArray* out, size_t reduce_size) {for (int i = 0; i < out->size; i++) {scalar_t max = a.ptr[i * reduce_size];for (int j = 0; j < reduce_size; j++) {max = std::max(max, a.ptr[i * reduce_size + j]);}out->ptr[i] = max;} } - ReduceSum:
void ReduceSum(const AlignedArray& a, AlignedArray* out, size_t reduce_size) {for (int i = 0; i < out->size; i++) {scalar_t sum = 0;for (int j = 0; j < reduce_size; j++) {sum += a.ptr[i * reduce_size + j];}out->ptr[i] = sum;} }
- ReduceMax:
- 【CPU】矩阵乘
- 朴素矩阵乘
Matmul:void Matmul(const AlignedArray& a, const AlignedArray& b, AlignedArray* out, uint32_t m, uint32_t n,uint32_t p) {for (int i = 0; i < m; i++) {for (int j = 0; j < p; j++) {out->ptr[i * p + j] = 0;for (int k = 0; k < n; k++) {out->ptr[i * p + j] += a.ptr[i * n + k] * b.ptr[k * p + j];}}} } MatmulTiled和AlignedDot:前者负责根据分片大小计算目前参与运算的是a、b、out的哪些元素(哪部分block);后者根据前者传进来的block进行计算(a分片与b分片进行矩阵乘法得到out分片void MatmulTiled(const AlignedArray& a, const AlignedArray& b, AlignedArray* out, uint32_t m,uint32_t n, uint32_t p) {for (int i = 0; i < m * p; i++) out->ptr[i] = 0;for (int i = 0; i < m / TILE; i++) {for (int j = 0; j < p / TILE; j++) {for (int k = 0; k < n / TILE; k++) {AlignedDot(&a.ptr[i * n * TILE + k * TILE * TILE], &b.ptr[k * p * TILE + j * TILE * TILE], &out->ptr[i * p * TILE + j * TILE * TILE]);}}} }
过程原理图:inline void AlignedDot(const float* __restrict__ a,const float* __restrict__ b,float* __restrict__ out) {a = (const float*)__builtin_assume_aligned(a, TILE * ELEM_SIZE);b = (const float*)__builtin_assume_aligned(b, TILE * ELEM_SIZE);out = (float*)__builtin_assume_aligned(out, TILE * ELEM_SIZE);for (int i = 0; i < TILE; i++) {for (int j = 0; j < TILE; j++) {for (int k = 0; k < TILE; k++) {out[i * TILE + j] += a[i * TILE + k] * b[k * TILE + j];}}} }

这里有一个疑问,a、b虽然每次通过MatmulTiled计算的分片的起始位置是正确的,但是如何保证连续的Tile*Tile分块元素就是如图所示那样的呢。按理说a、b的底层存储应该是连续的行优先,那(按照tile=2算)a[2]、a[3]、b[2]、b[3]应该是按行走下去而不是取下一行啊。待解答…
- 朴素矩阵乘
- 【CUDA】compact和setitem
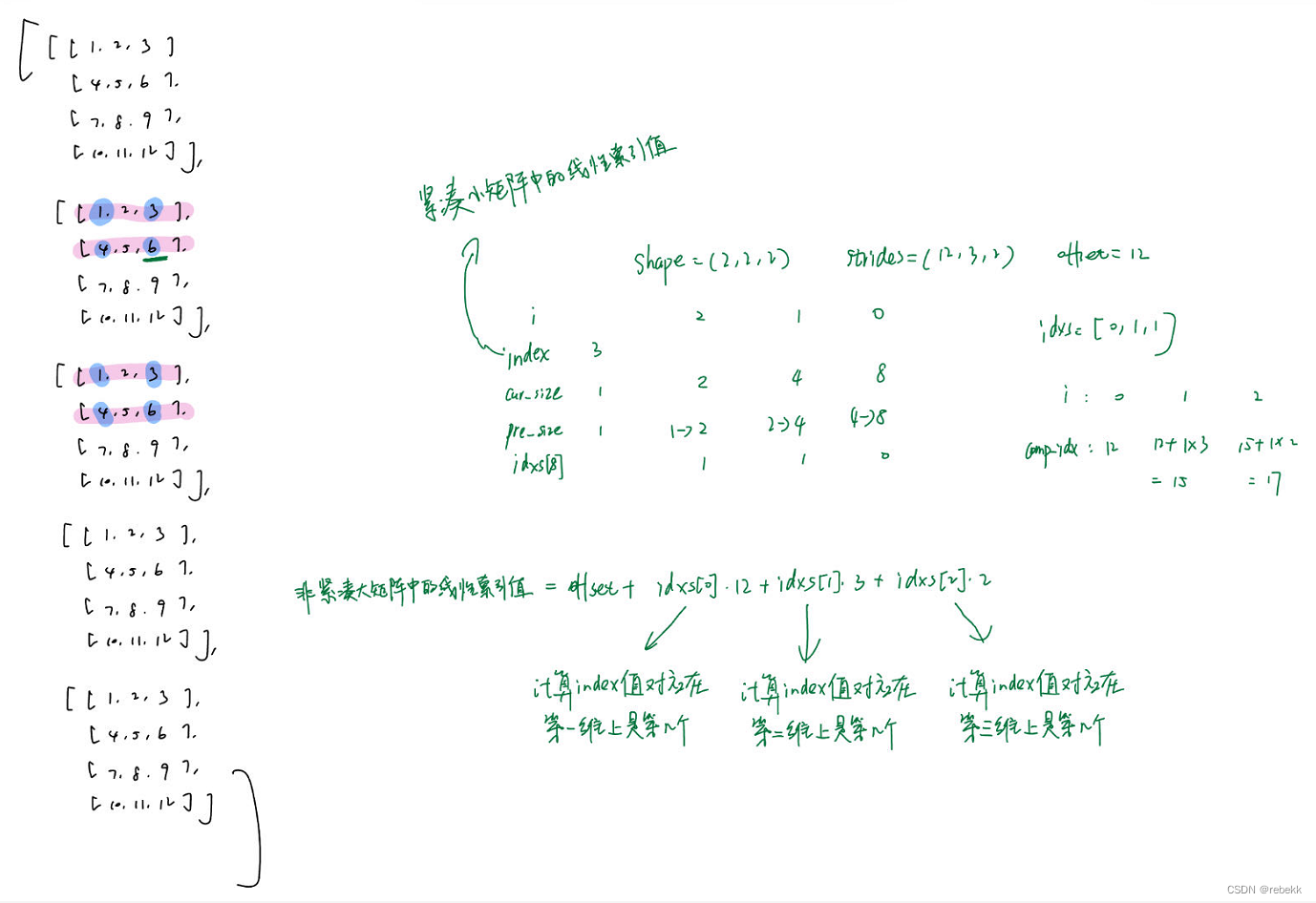
- compact:
图示如下:__device__ size_t index_transform(size_t index, CudaVec shape, CudaVec strides, size_t offset) {size_t idxs[MAX_VEC_SIZE];size_t cur_size, pre_size = 1;// 将给定的线性索引映射回多维数组的索引,即计算index值在各维度上对应是第几个// 思路就是从后往前遍历shape,cur_size表示当前处理的维度由几个元素构成// index%cur_size/pre_size就表示在当前维度的第几个分量// index%cur_size表示是当前维度(只看当前维)的第几个元素,再/pre_size就表示是当前维度的第几块for (int i = shape.size - 1; i >= 0; i--) {cur_size = pre_size * shape.data[i]; idxs[i] = index % cur_size / pre_size;pre_size = cur_size;}// 根据上述算好的多维数组索引,计算在原非紧凑型矩阵中的线性索引size_t comp_idx = offset;for (int i = 0; i < shape.size; i++) comp_idx += idxs[i] * strides.data[i];return comp_idx; }__global__ void CompactKernel(const scalar_t* a, scalar_t* out, size_t size, CudaVec shape,CudaVec strides, size_t offset) {size_t gid = blockIdx.x * blockDim.x + threadIdx.x;/// BEGIN YOUR SOLUTIONif (gid < size)out[gid] = a[index_transform(gid, shape, strides, offset)];/// END YOUR SOLUTION }void Compact(const CudaArray& a, CudaArray* out, std::vector<uint32_t> shape,std::vector<uint32_t> strides, size_t offset) {CudaDims dim = CudaOneDim(out->size);CompactKernel<<<dim.grid, dim.block>>>(a.ptr, out->ptr, out->size, VecToCuda(shape),VecToCuda(strides), offset); }
- EWiseSetitem:
__global__ void EwiseSetitemKernel(const scalar_t* a, scalar_t* out, size_t size, CudaVec shape,CudaVec strides, size_t offset) {size_t gid = blockIdx.x * blockDim.x + threadIdx.x;if (gid < size)out[index_transform(gid, shape, strides, offset)] = a[gid]; }void EwiseSetitem(const CudaArray& a, CudaArray* out, std::vector<uint32_t> shape,std::vector<uint32_t> strides, size_t offset) {/// BEGIN YOUR SOLUTIONCudaDims dim = CudaOneDim(out->size);EwiseSetitemKernel<<<dim.grid, dim.block>>>(a.ptr, out->ptr, a.size, VecToCuda(shape),VecToCuda(strides), offset);/// END YOUR SOLUTION } - ScalarSetitem:
__global__ void ScalarSetitemKernel(size_t size, scalar_t val, scalar_t* out, CudaVec shape, CudaVec strides, size_t offset) {size_t gid = blockIdx.x * blockDim.x + threadIdx.x;if (gid < size)out[index_transform(gid, shape, strides, offset)] = val; }void ScalarSetitem(size_t size, scalar_t val, CudaArray* out, std::vector<uint32_t> shape,std::vector<uint32_t> strides, size_t offset) {/// BEGIN YOUR SOLUTIONCudaDims dim = CudaOneDim(out->size);ScalarSetitemKernel<<<dim.grid, dim.block>>>(size, val, out->ptr, VecToCuda(shape),VecToCuda(strides), offset);/// END YOUR SOLUTION }- 其实总结一下,CPU版的将紧凑小矩阵的index转换成非紧凑大矩阵的index,是在一个loop中实现的,并在loop中找到index后就完成了copy工作;对于GPU版来说,是将copy工作分配给各个线程,因此若要让每个线程都能正确copy,还需要每个线程根据自己分配到的紧凑小矩阵的index,计算得到非紧凑大矩阵的index。即每个线程完成CPU版中一个loop的操作(但不需要后续的检查)。
- compact:
- 【CUDA】Elementwise和scalar操作
和CPU版本的一样,也很简单。且这part非常能体现CUDA的并行、高效特性。举个例子:__global__ void EwiseMulKernel(const scalar_t* a, const scalar_t* b, scalar_t* out, size_t size){size_t gid = blockInx.x * blockDim.x + threadIdx.x;if (gid<size){out[gid] = a[gid] * b[gid];} } void EwiseMul(const CudaArray &a, const CudaArray &b, CudaArray* out){CudaDims dim = CudaOneDim(out->size);EwiseMulKernel<<<dim.grid, dim.block>>>(a.ptr, b.ptr, out->ptr, out->size); } - 【CUDA】Reductions
- ReduceMax
__global__ void ReduceMaxKernel(const scalar_t* a, scalar_t* out, size_t reduce_size, size_t size){size_t gid = blockIdx.x * blockDim.x + threadIdx.x;if (gid<size){size_t offset = gid * reduce_size;scalar_t reduce_max = a[offset];for (int i=1; i<reduce_size; i++){reduce_max = max(reduce_max, a[offset+i]);}out[gid] = reduce_max;} }void ReduceMax(const CudaArray& a, CudaArray* out, size_t reduce_size) {CudaDims dim = CudaOneDim(out->size);ReduceMaxKernel<<<dim.grid, dim.block>>>(a.ptr, out->ptr, reduce_size, out->size); } - ReduceSum
- ReduceMax
- 【CUDA】矩阵乘
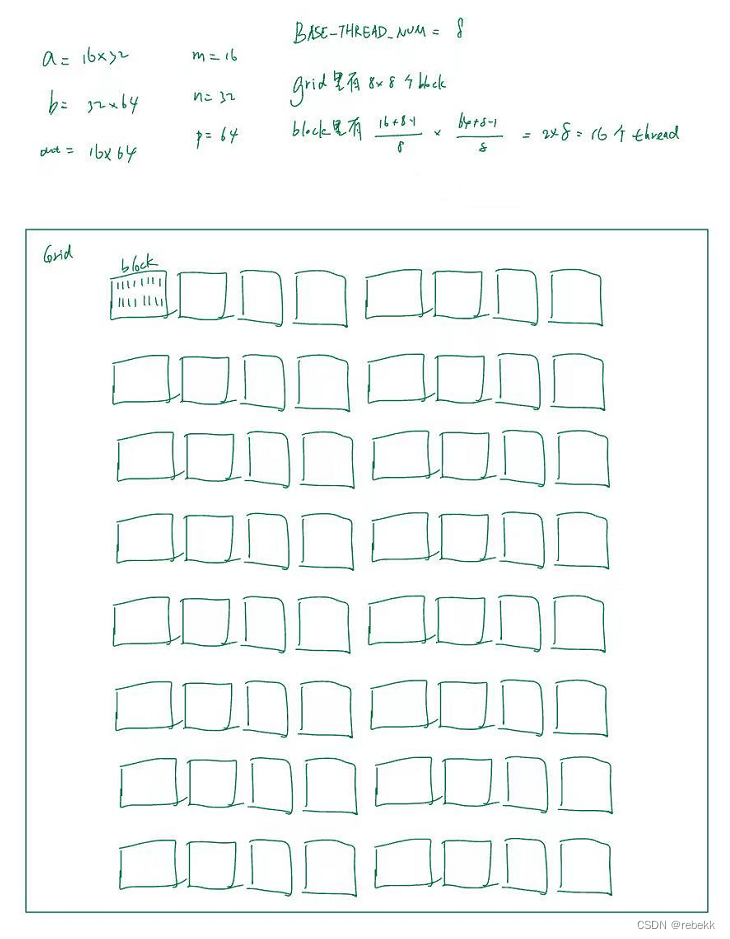
使用朴素矩阵乘即可,一个线程负责out矩阵的一个元素
线程分布如下:__global__ void MatmulKernel(const scalar_t* a, const scalar_t* b, scalar_t* out, uint32_t M,uint32_t N, uint32_t P) {size_t i = blockIdx.x * blockDim.x + threadIdx.x; size_t j = blockIdx.y * blockDim.y + threadIdx.y;if (i < M && j < P) {out[i * P + j] = 0;for (int k = 0; k < N; k++) {out[i * P + j] += a[i * N + k] * b[k * P + j];}} } void Matmul(const CudaArray& a, const CudaArray& b, CudaArray* out, uint32_t M, uint32_t N,uint32_t P) {dim3 grid(BASE_THREAD_NUM, BASE_THREAD_NUM, 1);dim3 block((M + BASE_THREAD_NUM - 1) / BASE_THREAD_NUM, (P + BASE_THREAD_NUM - 1) / BASE_THREAD_NUM, 1);MatmulKernel<<<grid, block>>>(a.ptr, b.ptr, out->ptr, M, N, P); }
补充知识
一、CUDA相关代码
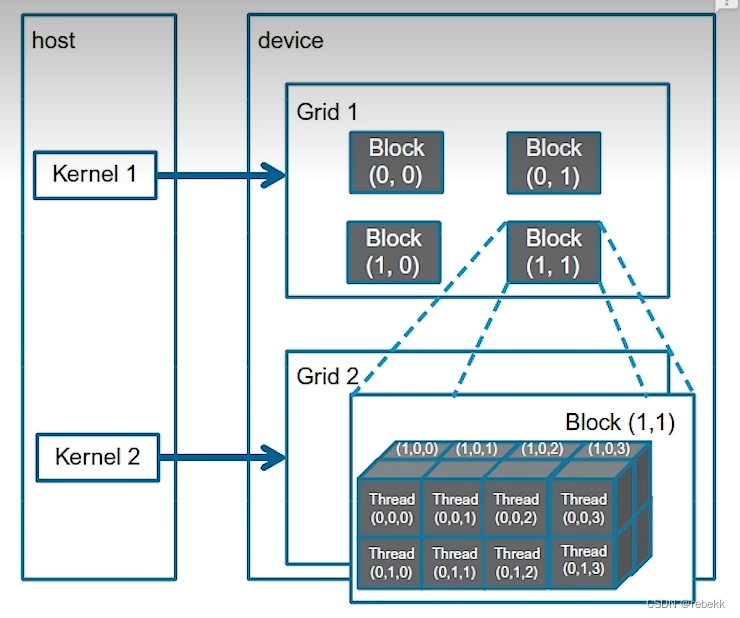
如上图的结构,首先定义Cuda的维度:
struct CudaDims {dim3 block, grid;
};
根据数据数量来判定需要多少个block、多少个thread(都是一个维度下的)
CudaDims CudaOneDim(size_t size) {/*** Utility function to get cuda dimensions for 1D call*/CudaDims dim;size_t num_blocks = (size + BASE_THREAD_NUM - 1) / BASE_THREAD_NUM;dim.block = dim3(BASE_THREAD_NUM, 1, 1); // 一个block里的线程dim.grid = dim3(num_blocks, 1, 1); // 一个grid里的blockreturn dim;
}
这篇关于CMU 10-414/714: Deep Learning Systems --hw3的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








