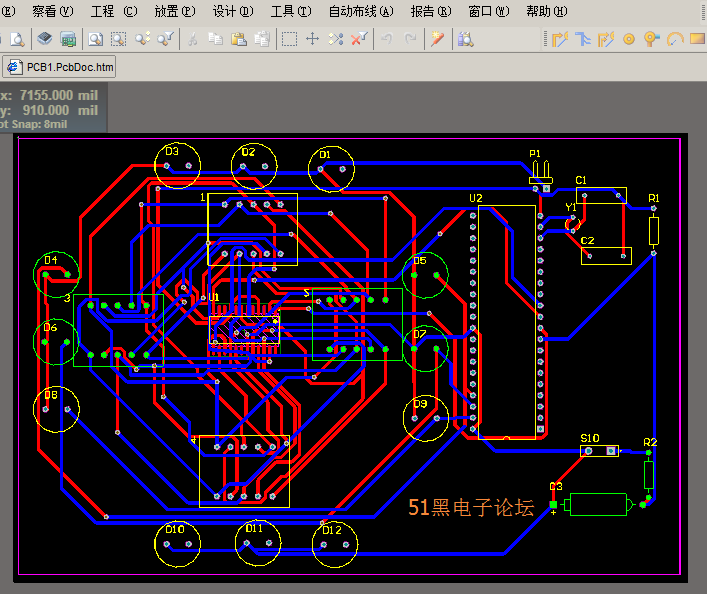
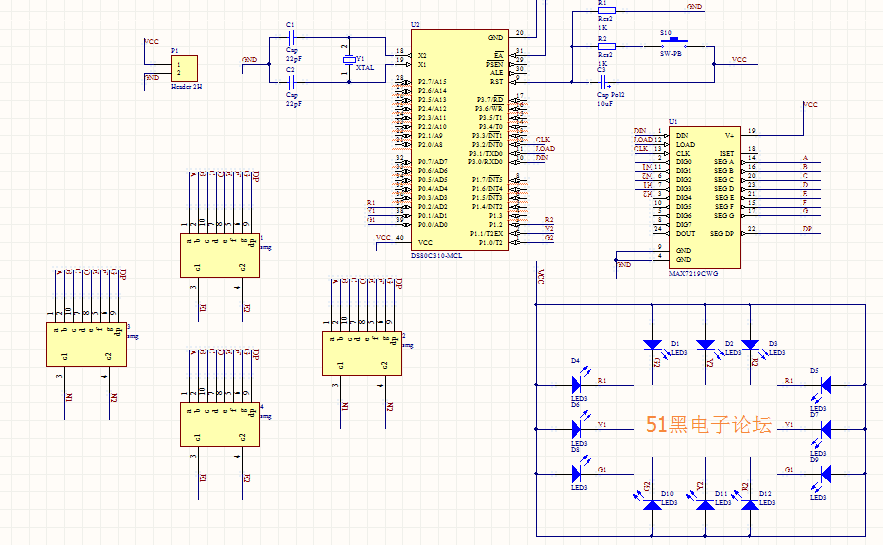
本文主要是介绍交通灯数码管C语言仿真,单片机交通灯PCB板图与仿真源码(MAX7219+数码管显示),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

单片机交通灯源程序如下:
#include
#include
#define uchar unsigned char
#define uint unsigned int
#define DIG0 0x01 // 定义数码管1
#define DIG1 0x02 // 定义数码管2
#define DIG2 0x03 // 定义数码管3
#define DIG3 0x04 // 定义数码管4
void delay(uint i);
void T0_init();
void MAX7219(uchar addr,uchar num);
void MAX7219_init(); //MAX7
这篇关于交通灯数码管C语言仿真,单片机交通灯PCB板图与仿真源码(MAX7219+数码管显示)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








