本文主要是介绍手把手教你,通过HAL库实现STM32的超声波测距--以SR-04为例,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
0、SR-04基本原理
1、准备工作
2、连线
3、STM32CUBEMX设置
3.1新建工程
3.2芯片通用设置
3.3定时器捕获设置
3.4其他设置
3.5生成工程
4、程序完善
4.1完善打印输出函数
4.2完善tim.c
4.3完善gpio.c
4.4完善main函数
5、总结
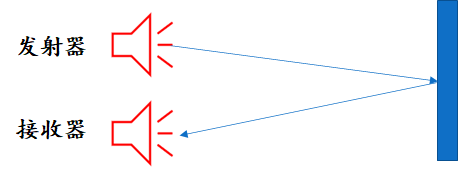
0、SR-04基本原理
声波遇到障碍物会反射,而声波的速度已知,所以只需要知道发射到接收的时间差,就能轻松计算出测量距离,再结合发射器和接收器的距离,就能算出障碍物的实际距离。

以HC-SR04硬件为例,端口为VCC、Trig、Echo、GND。
VCC–接STM32板子+5V;
GND–接STM32板子GND;
Trig–为触发控制信号输入,触发测距,给至少10us的高电平信号,模块自动发射8个40KHz的方波,自动检测是否有信号返回;
Echo–回响信号输出,有信号返回,通过IO口ECHO输出一个高电平,高电平持续时间就是超声波从发射到返回的时间。
那用STM32怎么给端口信号呢?又是怎么获取信号呢?
Trig端口为超声波模块的输入信号,也就是通过STM23一个端口推挽输出一个至少10us的高电平信号即可,利用delay_ms(20)实现;
Echo端口为超声波模块的输出信号,也就是利用STM32端口捕获高电平时间,那么这个端口肯定是可以用做定时器的端口。
通过以上分析,这里采用以下STM32端口


1、准备工作
开发板:STM32F1精英版
软件:STM32CubeMx软件
IDE: MDK-Keil软件
传感器:HC-SR04
2、连线
选择TIM5的CH1即PA0作为输入捕获引脚(Echo),选择PA5作为触发脚Trig。具体连接线如下:
红线连接精英版的5V与SR04的VCC脚
白线连接精英板的GND与SR04的GND脚
橙色线连接精英板的PA5与Trig脚
黑色线连接精英板的PA0与Echo脚

3、STM32CUBEMX设置
3.1新建工程
1)新建工程

2)选择芯片

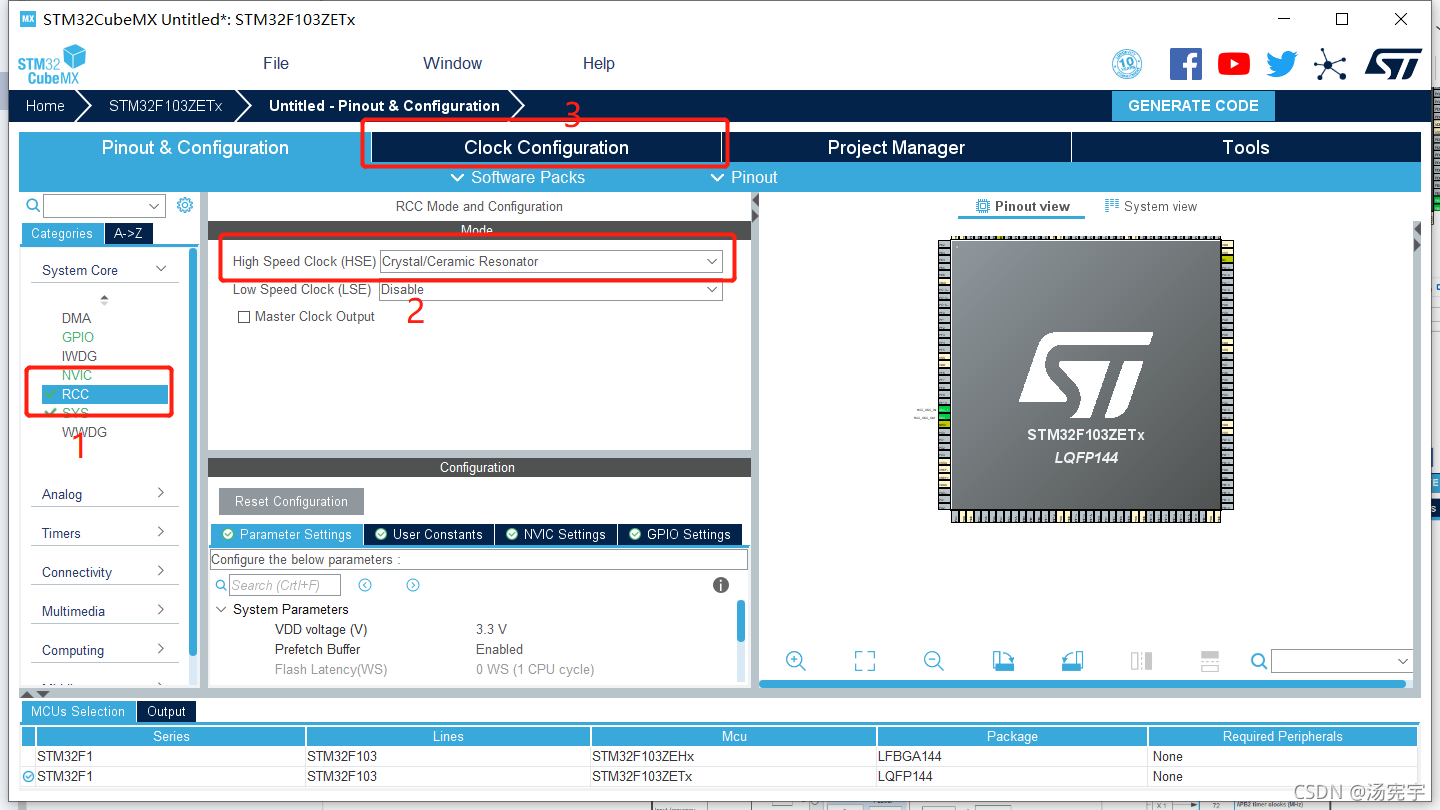
3.2芯片通用设置
1)时钟芯片设置
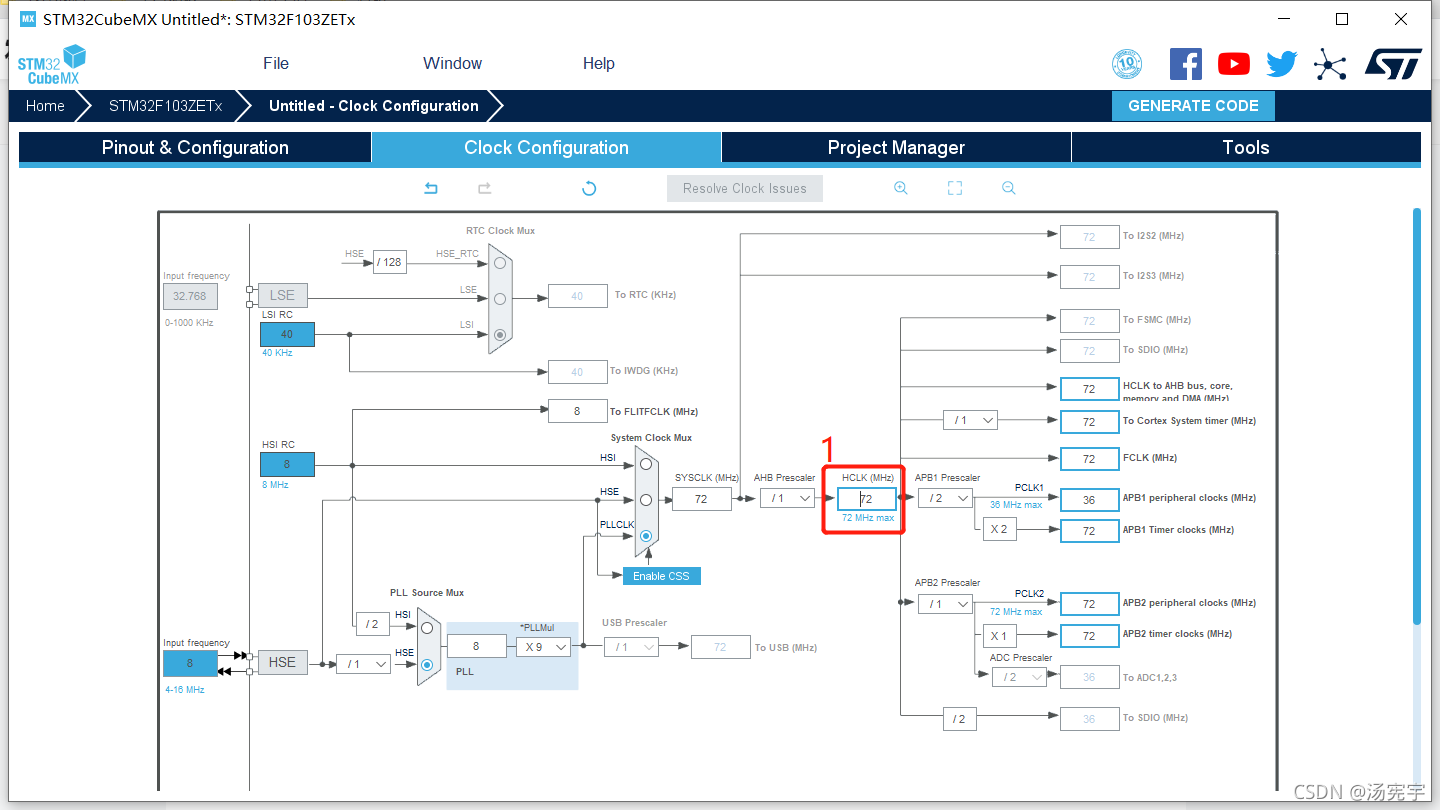
2)时钟设置
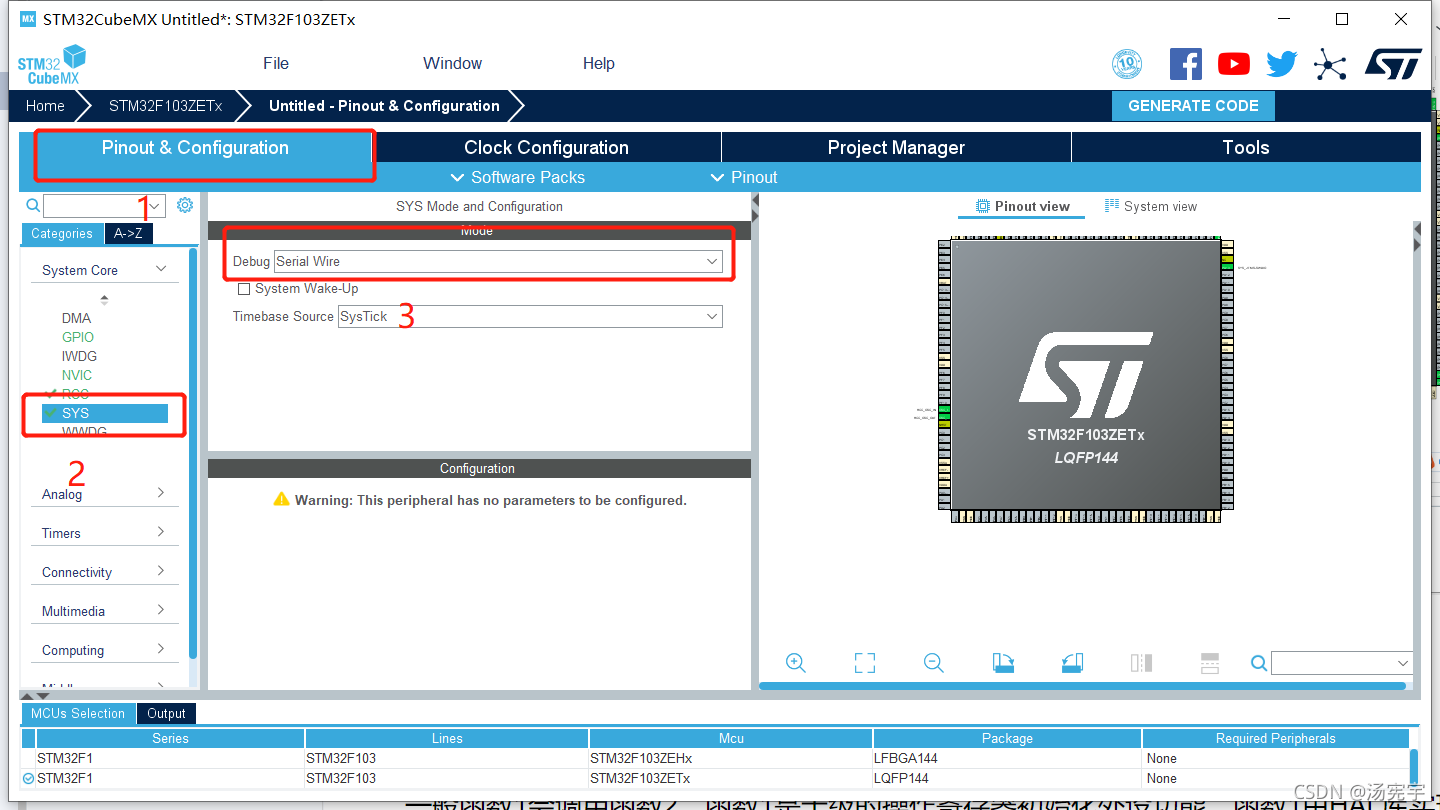
3)系统调试设置
3.3定时器捕获设置
由于前文连线中,我们将TIMER5CH1作为输入捕获引脚,所以对TIMER5进行设置:
Channel 1选择:Input Capture direct mode
与分频系数填写:72-1(则每次计数为1us)
Polarity Selection选择:Rising Edge(上升沿)
其他保持不变。

NVIC settings选择TIM5 global interrupt

3.4其他设置
1)USART1设置
为了方便调试,将测量所得数据通过串口传递到电脑上进行显示,此处使用串口1通过printf将输出发送至电脑。

2)GPIO配置
此处选择PA5作为Trig脚,具体配置如下:

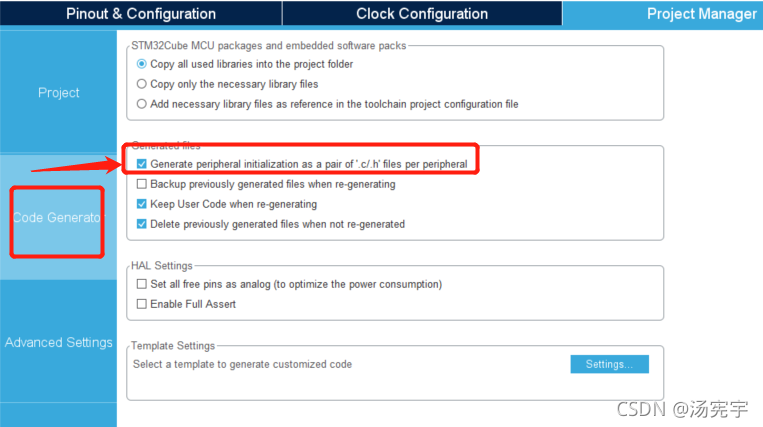
3.5生成工程

4、程序完善
4.1完善打印输出函数
在main函数中加入下面语句:
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
/* USER CODE END Includes *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
#ifdef __GNUC__#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endifPUTCHAR_PROTOTYPE
{HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);return ch;
}
/* USER CODE END 0 */加入此语句之后可以在main函数中加入printf语句测试是否成功。
将精英板USB232口通过USB数据线与电脑连接,并在电脑上打开串口调试软件: 

4.2完善tim.c
在tim.c中加入以下程序:
定义变量:
/* USER CODE BEGIN 0 */
//捕获状态
//[7]:0,没有成功的捕获;1,成功捕获到一次.
//[6]:0,还没捕获到低电平;1,已经捕获到低电平了.
//[5:0]:捕获低电平后溢出的次数
uint8_t TIM5CH2_CAPTURE_STA=0; //输入捕获状态
uint16_t TIM5CH2_CAPTURE_VAL; //输入捕获值(TIM2是16位)
/* USER CODE END 0 */在底部加入溢出回调函数和输入捕获回调函数。其中参考了正点原子官方的的输入 捕获回调函数。
/* USER CODE BEGIN 1 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//更新中断(溢出)发生时执行
{if((TIM5CH2_CAPTURE_STA&0X80) ==0) //还未捕获成功{if(TIM5CH2_CAPTURE_STA&0X40) //捕获到一个下降沿{if((TIM5CH2_CAPTURE_STA&0X3F)==0X3F) //高电平时间太长了{TIM5CH2_CAPTURE_STA |= 0X80; //标记成功捕获一次TIM5CH2_CAPTURE_VAL = 0XFFFF; //}elseTIM5CH2_CAPTURE_STA++; //否则标记溢出数加一}}}void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//捕获中断发生时执行
{if((TIM5CH2_CAPTURE_STA&0x80)==0) //还未捕获成功{if(TIM5CH2_CAPTURE_STA&0x40) //成功捕获到一个下降沿{TIM5CH2_CAPTURE_STA |= 0X80; //标记成功,捕获到一次高电平完成TIM5CH2_CAPTURE_VAL = HAL_TIM_ReadCapturedValue(&htim5, TIM_CHANNEL_1); //获取当前捕获值TIM_RESET_CAPTUREPOLARITY(&htim5, TIM_CHANNEL_1); //清除原来设置TIM_SET_CAPTUREPOLARITY(&htim5, TIM_CHANNEL_1, TIM_ICPOLARITY_RISING); //捕获到下降沿后,将捕获复位到捕获上升沿}else //捕获到一个上升沿{TIM5CH2_CAPTURE_STA = 0;TIM5CH2_CAPTURE_VAL = 0;TIM5CH2_CAPTURE_STA |= 0x40; //第六位标记为捕获到上升沿__HAL_TIM_DISABLE(&htim5); //关闭定时器__HAL_TIM_SET_COUNTER(&htim5, 0); //定时器初始值设置为0TIM_RESET_CAPTUREPOLARITY(&htim5, TIM_CHANNEL_1);TIM_SET_CAPTUREPOLARITY(&htim5, TIM_CHANNEL_1, TIM_ICPOLARITY_FALLING); //捕获到上升沿之后,将捕获设置为下降沿__HAL_TIM_ENABLE(&htim5);}}
}
/* USER CODE END 1 */4.3完善gpio.c
模拟Trig脚,先置位,过40us后,复位。
/* USER CODE BEGIN 2 */
void CHL_capture(void)
{uint32_t i;HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_SET);for(i=0;i<72*40;i++)__NOP();HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_RESET);}
/* USER CODE END 2 */4.4完善main函数
int main(void)
{/* USER CODE BEGIN 1 */float len = 0;uint32_t time= 0;uint8_t count = 0;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM5_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */printf("Hello World!\r\n");HAL_TIM_IC_Start_IT(&htim5,TIM_CHANNEL_1); //开启TIM2的捕获通道2,并且开启捕获中断__HAL_TIM_ENABLE_IT(&htim5,TIM_IT_UPDATE); //使能更新中断/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */HAL_Delay(100);CHL_capture();if(TIM5CH2_CAPTURE_STA & 0x80) //成功捕获一个脉宽{time = TIM5CH2_CAPTURE_STA & 0x3F; //获取溢出次数time *= 65536; //获得溢出的时间值time += TIM5CH2_CAPTURE_VAL; //加上最后一次取得的值len = time * 342.62*100/2000000;TIM5CH2_CAPTURE_STA = 0;}printf("LENGTH: %f CM\r\n", len);}/* USER CODE END 3 */
}
5、总结
本文介绍了通过HAL库完成SR-04超声波传感器距离的测量。包括了,超声波传感器的原理、STM32CUBEMX的配置,以及程序的完善。最终的结果如下:

这篇关于手把手教你,通过HAL库实现STM32的超声波测距--以SR-04为例的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








