本文主要是介绍基于HAL库的STM32嵌入式学习记录(持续更新中,若内容有误欢迎评论指正),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
KEY(按键触发)
扫描触发
void KEY_work(void)
{if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == RESET)//检测按键电平变化{HAL_Delay(50);//延时,避免抖动if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == RESET)//再次检测电平{HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_1);//翻转PA0电平}}
}中断触发
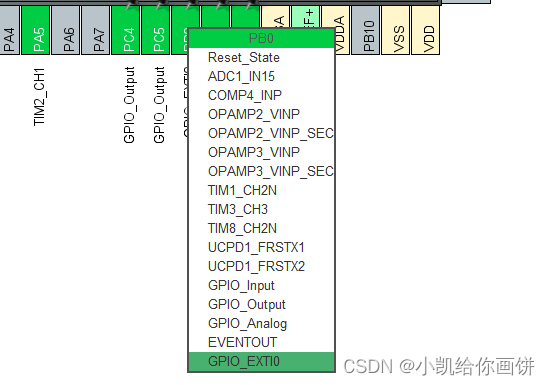
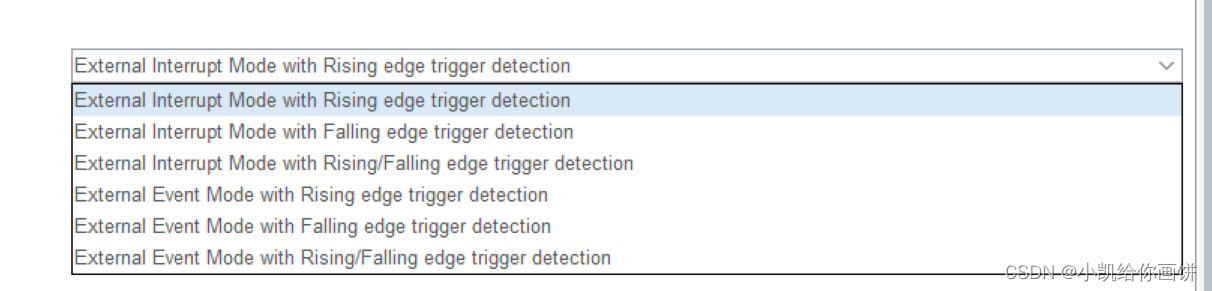
选择IO口中断模式
在STM32单片机中针对IO口中断总共有十五个,其中GPIO_EXIT_0中断对应每组IO口的0接口,与此对应的是PA0和PB0的中断不能同时开启
重写中断回调虚函数 HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
在IO口中断中传递参数uint16_t GPIO_Pin为GPIO_PIN_X,当开启多个IO口中断时为区分触发中断的IO口,重写回调函数时要进行判断
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin == GPIO_PIN_0)//判断触发串口(如开启中断串口不止一个则采用不同的if判断条件){HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_2);//翻转PA2串口电平while(HAL_GPIO_ReadPin(GPIOB,GPIO_0 == 0));//恢复高电平后退出(针对下降沿触发,避免多次触发中断,可忽略)}
}点灯!!!
点灯原理:给led灯对应IO口输出相应电平
以蓝桥杯嵌入式比赛板(STM32G431RBT6)为例:
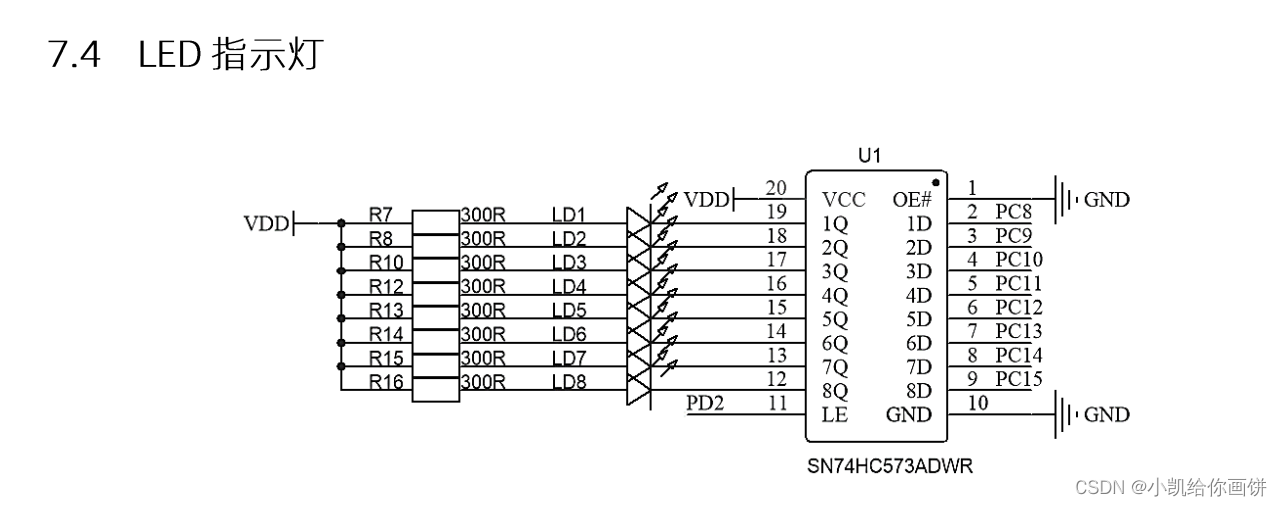
LED灯非引脚段为高电平,当引脚输出低电平时LED二极管接通发光。IO口输出间与LED以锁存器连接 ,其中引脚PD2输出高电平时使能:Q=D,通过控制锁存器的使能与否可以实现控制LED灯的同时实现引脚的复用。
void LED_work(void)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_RESET);//PC2输出低电平,灯亮HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);//锁存器使能(使能最好在输出赋值之后)HAL_Delay(5);//延时(视情况可不加)HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);//寄存器输出锁存
}定时器(TIM)
STM32定时器基础
时钟树设置(时钟频率):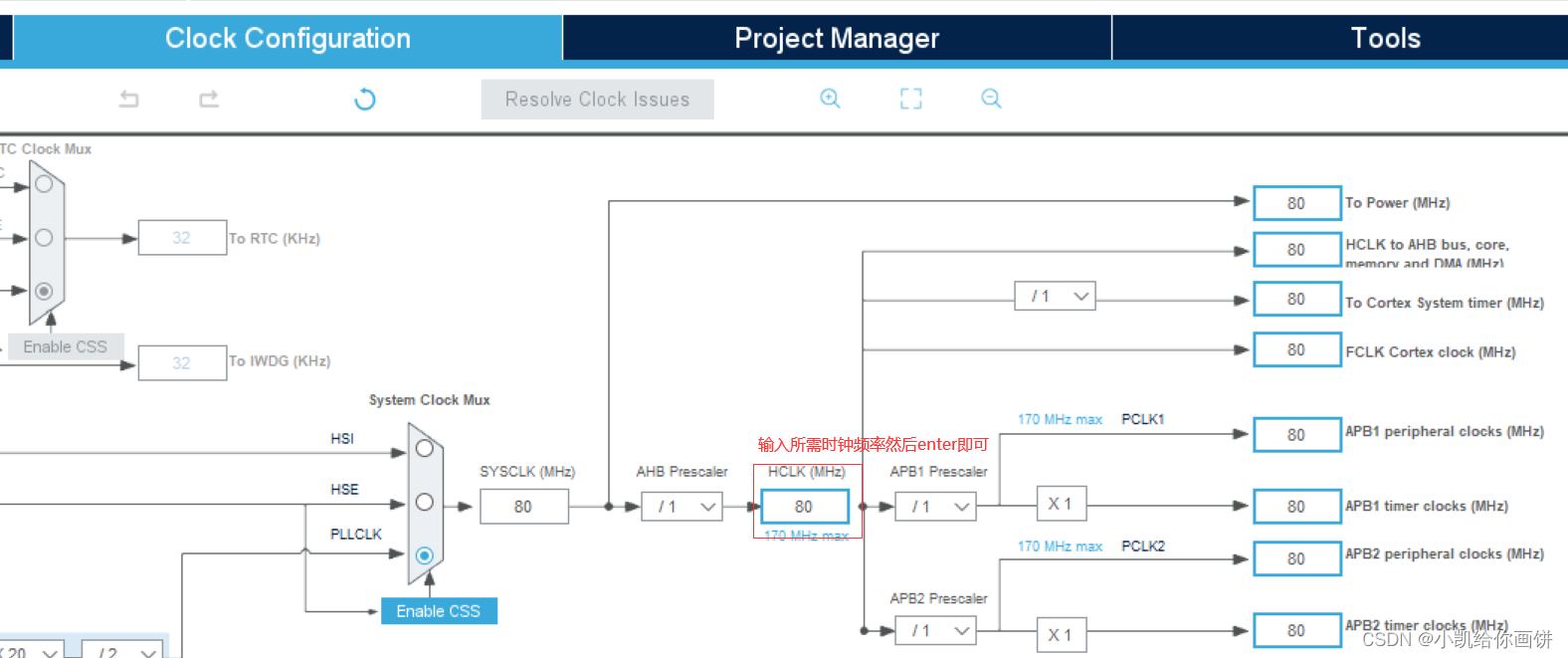
PS:此方法对于大部分情况已经完全够用。想深入学习stm32时钟树的知识建议移步其他大佬博客,这里不再赘述。
定时器频率计算:定时频率=时钟频率/(预分频器(Prescaler)*计数周期(Counter Period)预分频器)
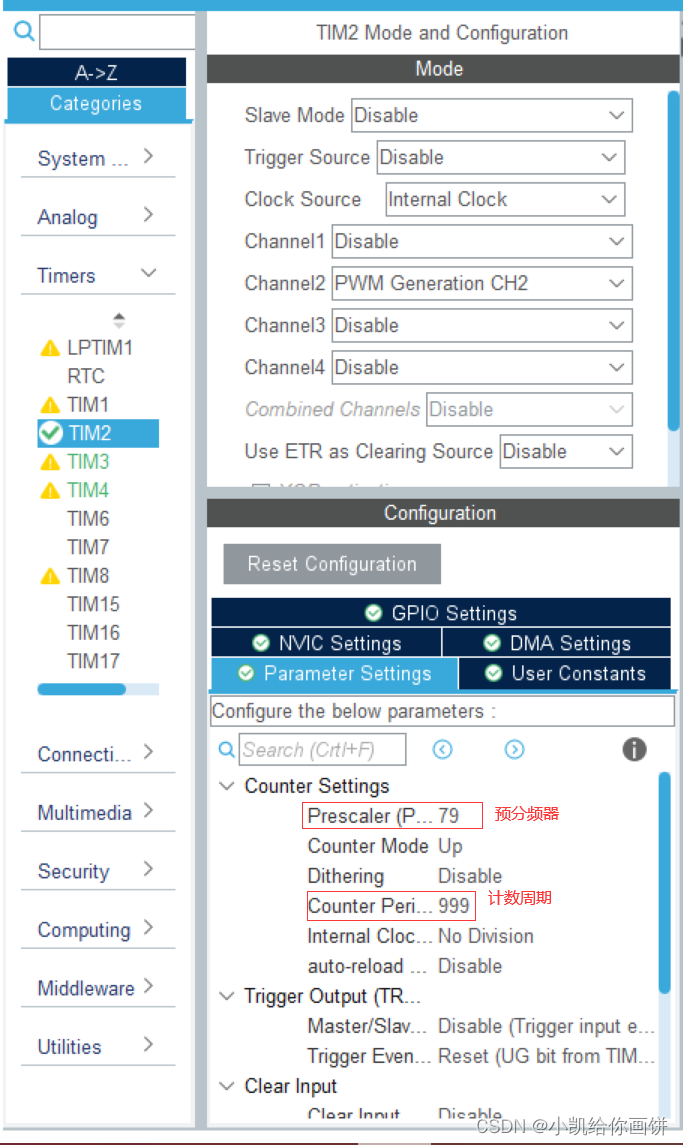
预分频器和计数周期都含0,在设置时应减一。以上截图中设置的定时器频率为80000000/(80*1000)=1Khz
定时触发:
在设置好定时频率后,我们可以让单片机间隔一段时间重复执行某些任务。例如每隔0.1秒翻转LED灯电平实现闪灯操作:

HAL_TIM_Base_Start_IT(&htim4);//主函数中开启定时器4中断void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//重写中断回调虚函数
{if(htim->Instance == TIM4)//判断触发定时器(在有多个不同中断触发时间的任务执行时在同一个回调函数里编写,编写时注意改变if判断条件){HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_8);//翻转电平HAL_GPIO_WritePin(GPIOD,GPIO_PIN_10,GPIO_PIN_RESET);//使能锁存器HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);//关闭锁存器(避免引脚复用干扰)}
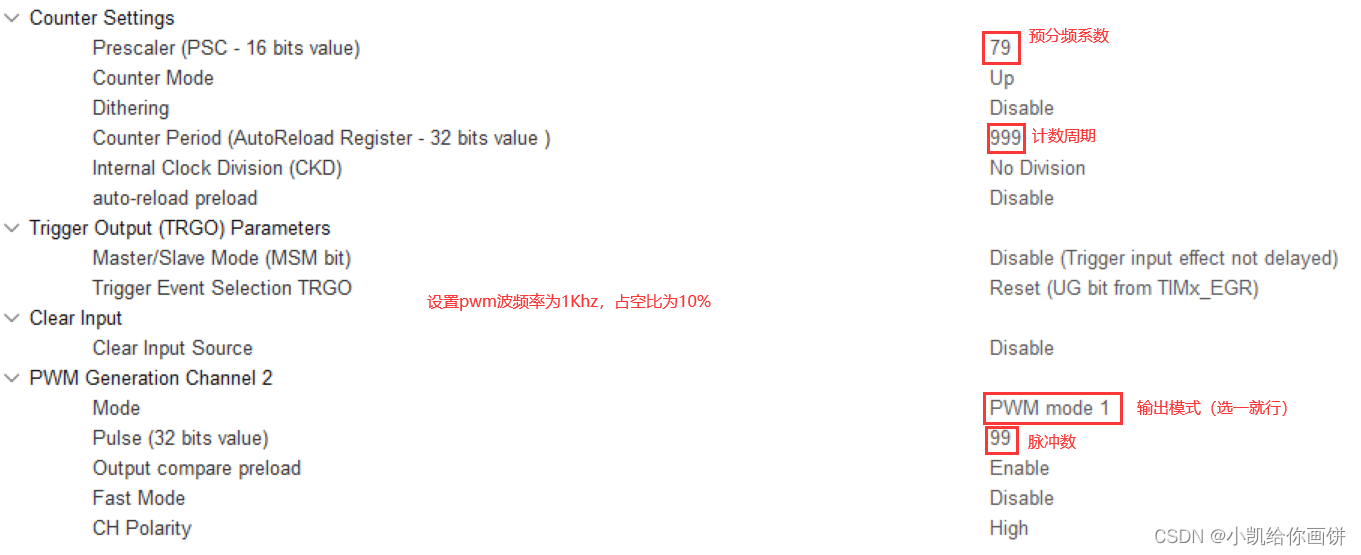
}PWM波输出 :
占空比:一个脉冲时间内,高电平占一个脉冲周期的时间。
占空比计算:脉冲数(Pulse)/计数周期(Counter Period)*100%
AD/DA模数转换(引脚输出电压获取)
cubemx配置:

转换函数:
HAL_ADC_Start(&hadc1);//开启ADC通道
if(HAL_ADC_PollForConversion(&hadc2,10) == HAL_OK)//检测是否有数据输入
{adc = HAL_ADC_GetValue(&hadc2);//获取数据sprintf(&adc_im," V2=%1.2f ",adc*3.3/4096);//显示数据(ADC分辨率为十二位,即4096,而引脚输出电压最高为3.3V,所以需要进行变换)LCD_DisplayStringLine(Line6,(uint8_t *)&adc_im);//LCD显示
}输入捕获
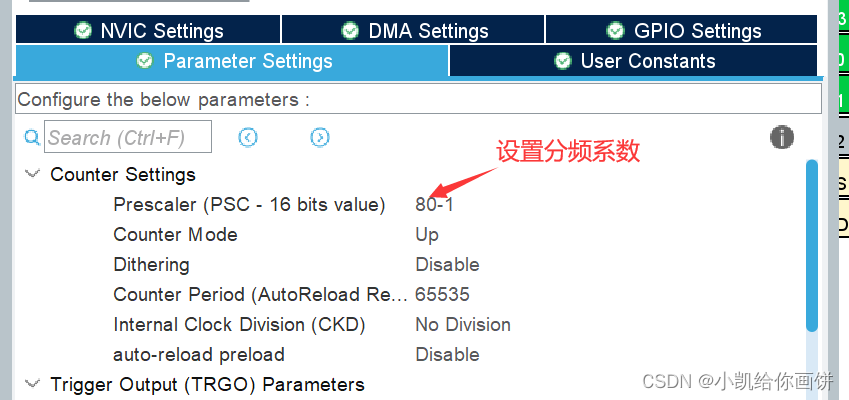
cubemx配置:
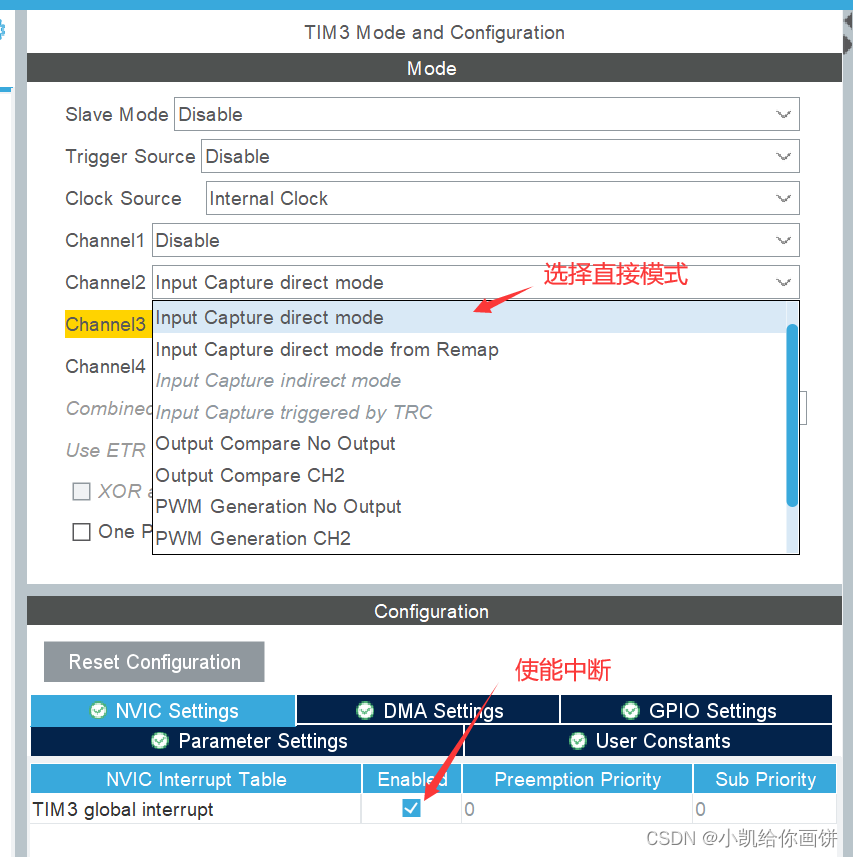
捕获函数:
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2); //开启相应通道IC捕获中断//重写捕获中断函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance == TIM3) //确认信号输入通道{count = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2);//获取计数值__HAL_TIM_SetCounter(&htim3,0); //计数值清零f = (80000000/80)/(count+2); //计算频率HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2); //重新开启IC捕获中断}
}I2C通讯
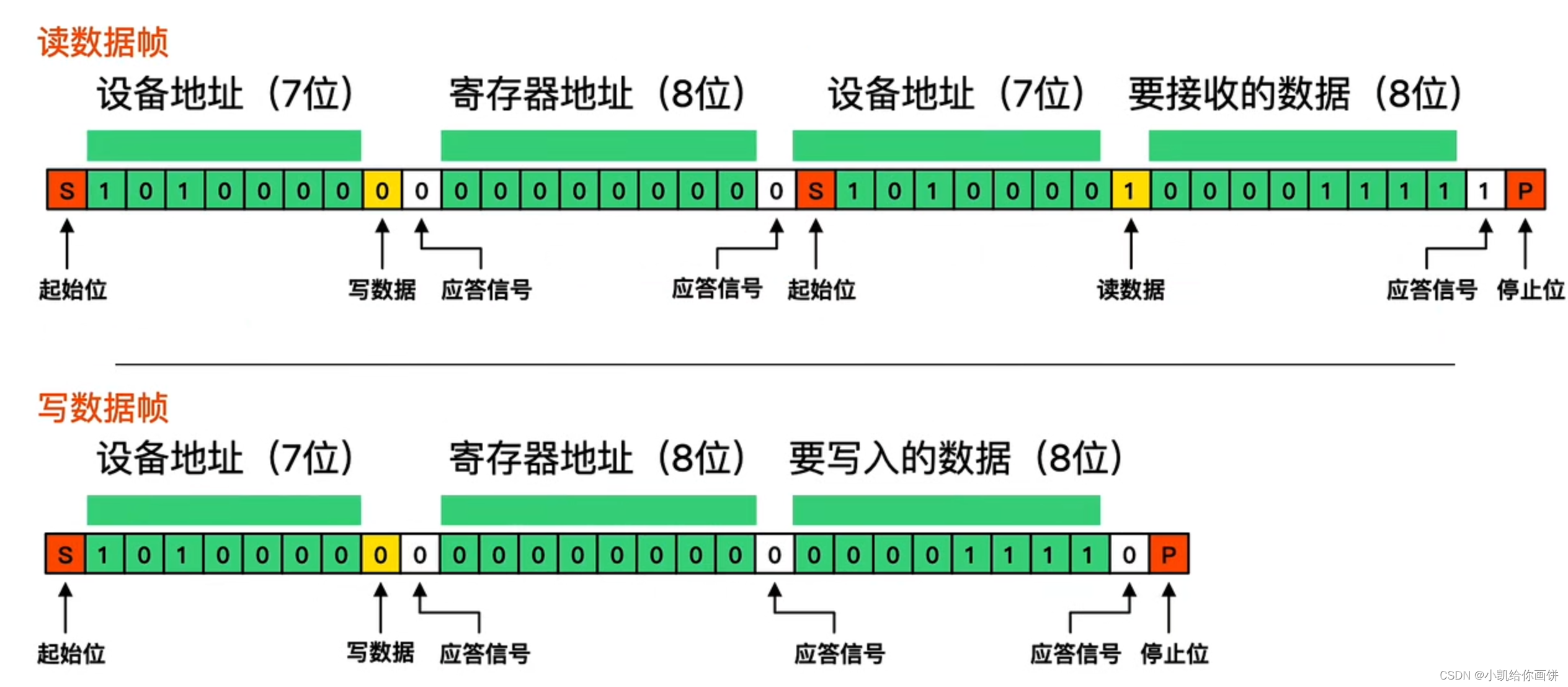
I2C通讯原理:
cubemx配置:

由于蓝桥杯竞赛板中采用的是软件I2C,所以这里复用这两个引脚为输出态即可 。
收发函数:
void IIC_send(unsigned char text,unsigned char locad)//发送内容|储存地址(这里储存地址为从机寄存器地址,一般情况下为数字)
{I2CStart();//开启I2CI2CSendByte(0xa0);//发送从机地址和写数据请求I2CWaitAck();//等待响应I2CSendByte(locad);//发送从机寄存器储存地址I2CWaitAck();//等待响应I2CSendByte(text);//发送存储内容I2CWaitAck();//等待响应I2CStop();//关闭I2C
}//发送函数
//一般情况下发送内容限定为八个字节,所以发送大容量内容时要将数据截多段八字节内容,可采用左移符号'<<'和右移符号'>>'结合实现字节截断unsigned char IIC_receive(unsigned char locad)//接收数据所在的寄存器地址
{unsigned text;//无符号型变量I2CStart();//开启I2CI2CSendByte(0xa0);//指定从机和发送写数据请求I2CWaitAck();//等待响应I2CSendByte(locad);//发送从机寄存器地址I2CWaitAck();//等待响应I2CStop();//关闭I2CI2CStart();//开启I2CI2CSendByte(0xa1);//发送从机地址和读数据请求I2CWaitAck();//等待响应text = I2CReceiveByte();//接收并储存数据I2CWaitAck();//等待响应I2CStop();//关闭I2Creturn text;//返回接收数据
}//接收函数UART串口收发
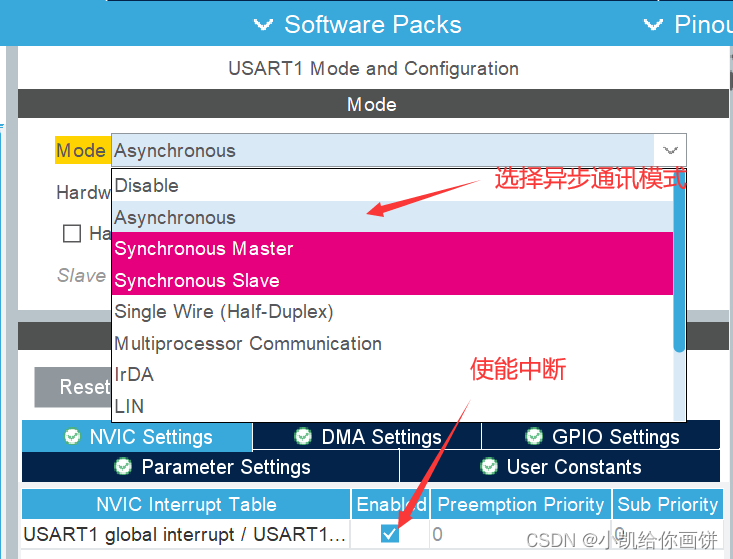
cubemx配置:
串口发送:
char Rx[7]; //要发送的数据
HAL_UART_Transmit(&huart1,(uint8_t *)Rx,sizeof(Rx),50);
//参数意义分别为:通道编号,预发送数据,发送长度,超时重传串口接收:
uint8_t rx,r_len;
char Rx[7];HAL_UART_Receive_IT(&huart1,&rx,1); //开启接收中断//重写接收中断服务函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance == USART1) //确定中断源{Rx[r_len ++] = rx; //接收数据写入HAL_UART_Receive_IT(&huart1,&rx,1); //重新开启接收中断if(r_len == 7){HAL_UART_Transmit(&huart1,(uint8_t *)Rx,sizeof(Rx),50);r_len = 0; //接收位置复位,发送接收的数据}}
}这篇关于基于HAL库的STM32嵌入式学习记录(持续更新中,若内容有误欢迎评论指正)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







