本文主要是介绍智能车图像处理14-进阶篇6--坡道的判定,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
希望大家多多点赞评论收藏哦,不懂的地方评论区留言就好。
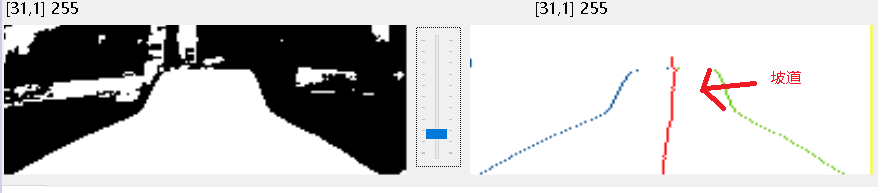
这篇文章主要讲述智能车竞赛中如何判断坡道,典型场景如下。
思路讲解
(1)判断坡道
核心:
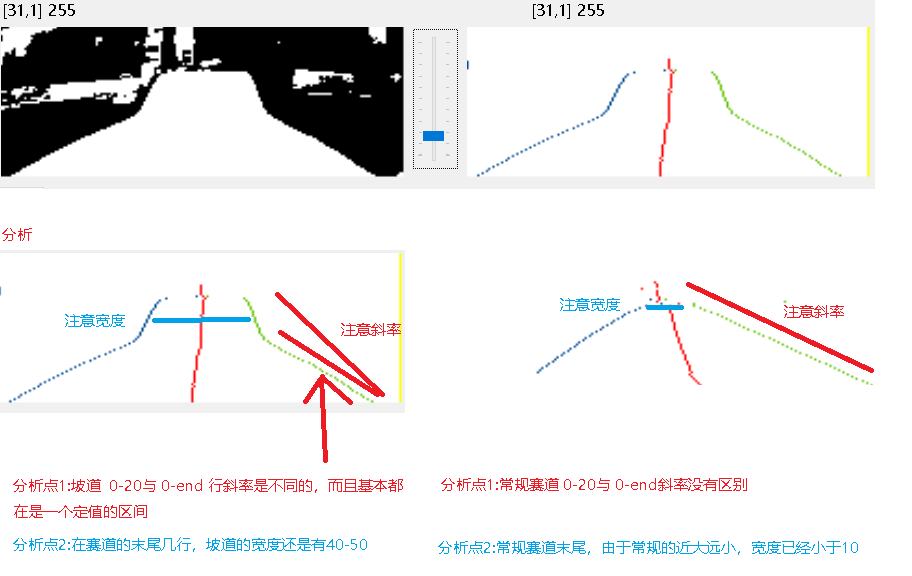
比较0-20 0-end 行的斜率差值,来做出坡道的判定。
这里的理论依据是,坡道情况下,整个赛道会被抬高。
会明显看到坡道那一段的斜率和前面普通赛道上斜率出现不同。
就像两个线段接在一起一样。
具体实现:
(1)不在环岛状态机中
(2)找到0-20 0-end 左右线斜率的关系
(3)宽度值必须要满足一定的条件 (因为坡道也是赛道 宽度要足够宽)
(4)持续好几帧图像
请看下图分析 : 判断坡道
特殊补充:
弯道接坡道 不可能有时间足够的帧数去判别
思路就是 :因为40行是图像的尽头了 一般宽度20 30
如果40行左右宽度仍然大于50 60 就认为弯接坡道
进入坡道状态机
(2)后续操作如下:
(1)上坡一定程度锁定中值
(2)坡顶开启扫线
(3)下坡状态
首先,判断到坡道之后十帧图像之内 认为是
这篇关于智能车图像处理14-进阶篇6--坡道的判定的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







