本文主要是介绍[AutoSar]BSW_Com010 CAN IF 模块介绍,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 关键词
- 平台说明
- 一、CAN IF 所在架构位置
- 二、CAN interface 简介
- 三、CAN interface 主要功能描述
- 3.1 CANIF 被调用方式
- 3.1.1 中断模式
- 3.1.2 轮询模式
- 3.1.3 混合模式
- 3.2 Hardware object handles(HO)
- 3.4 Dynamic L-PDUs
- 3.4.1 Dynamic Transmit L-PDUs
- 3.4.2 Dynamic receive L-PDUs
- 3.5 Physical channel view
- 3.6 CAN Hardware Unit
- 3.7 BasicCAN and FullCAN reception
- 3.8 Initialization
- 3.9 Transmit request
- 3.10 Transmit data flow
- 3.11 Transmit buffering
- 3.11.1 General behavior
- 3.11.2 Storage of L-PDUs in the transmit L-PDU buffer
- 3.11.3 Initialization of transmit L-PDU buffers
- 3.12 Transmit confirmation
- 3.13 Receive data flow
- 3.14 Receive indication
- 3.15 Read received data
- 3.16 Read Tx/Rx notification status
- 3.17 Data integrity
- 3.18 CAN Controller Mode
- 3.18.1 CAN Controller Operation Modes
- 3.18.2 Controller Mode Transitions
- 3.18.4 Wake-up
- 3.18.4.1 Wake-up detection
- 3.18.4.2 Wake-up Validation
- 3.19 PDU channel mode control
- 3.19.1 PDU channel modes
- 3.20 Software receive filter
- 3.20.1 Software filtering concept
- 3.21 Data Length Check
关键词
嵌入式、C语言、autosar、OS、BSW
平台说明
| 项目 | Value |
|---|---|
| OS | autosar OS |
| autosar厂商 | vector , EB |
| 芯片厂商 | TI 英飞凌 |
| 编程语言 | C,C++ |
| 编译器 | HighTec (GCC) |
| autosar版本 | 4.3.1 |

>>>>>回到总目录<<<<<<
一、CAN IF 所在架构位置
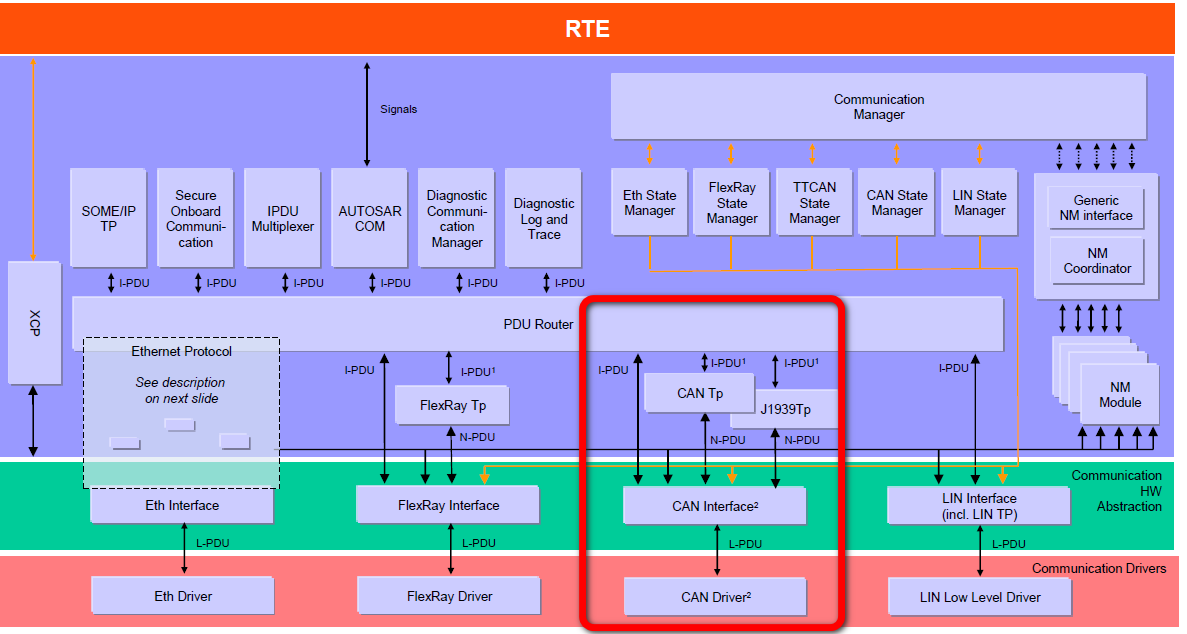
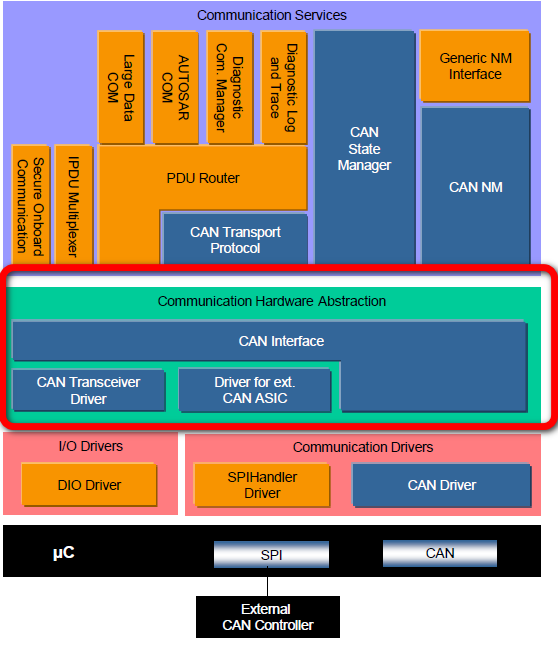
二、CAN interface 简介
如上图所示,CAN interface 简称canif,位于下层的 CAN 物理层(CAN Driver + CAN transceiver) 与上层的 CAN 服务层 (CAN sm +CAN NM)CAN 协议层(CAN TP + PDUR)之间。
CANif 独立于硬件,提供了统一的接口来管理CAN 物理层的设备,同时可以结合CAN SM 模块来管理所有的内外部CAN driver 和CAN transceiver,实现对他们的状态改变。
在PDU 的接收和传输中,向上层可以通知发送确认(transmit confirm),接收指示(Rxindication())将下层的PCI 和SDU打包传递给上层。向下可以将SUD 分发给驱动。
支持功能:
1.CAN Interface 初始化
2.Transmit confirmation
3.Transmit buffer
4.Receive indication
5.DLC check
6.CAN FD support
7.Communication Modes
8.BusOff detection
9.External wakeup
10.Wakeup validation
11.Multiple CAN Driver support
三、CAN interface 主要功能描述
3.1 CANIF 被调用方式
3.1.1 中断模式
CanIf services 在CAN driver 产生的中断中被调用。
3.1.2 轮询模式
CanIf services 在Can_MainFunction_XX (XX = Write/read/busoff/wakeup/transceiver)中被调用。
3.1.3 混合模式
例如:full can 用 中断,basic can 用轮询。
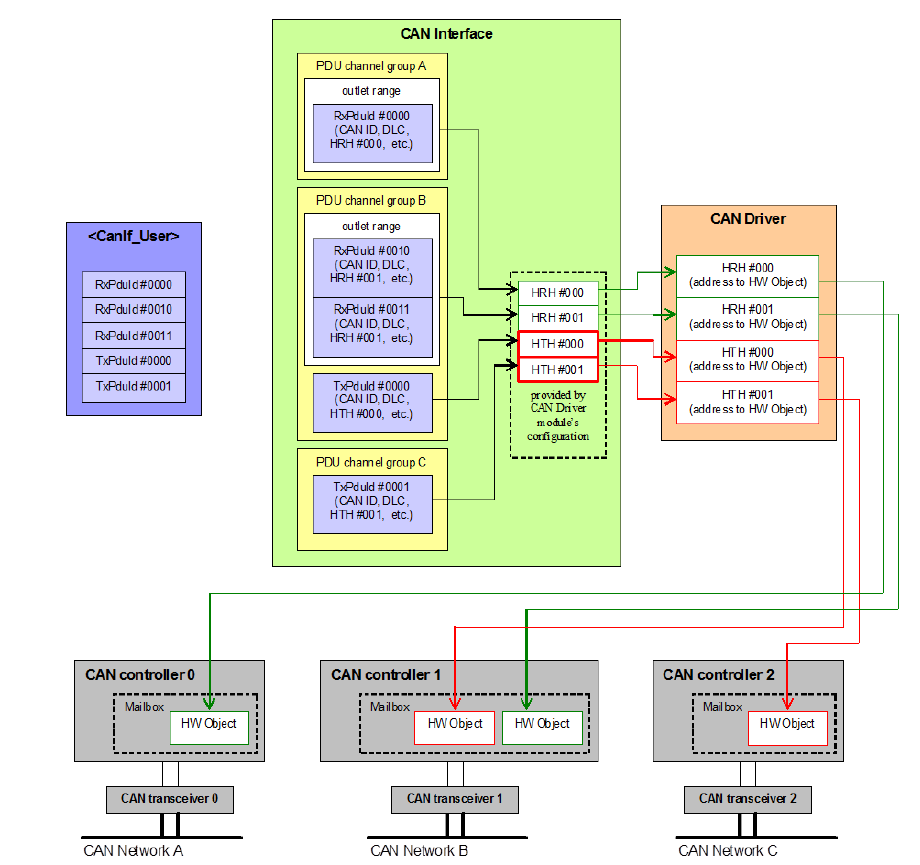
3.2 Hardware object handles(HO)
用于发送(HTH)和接收(HRH)的硬件对象句柄(HOH)表示对CAN邮箱结构的抽象引用,该结构包含CAN相关参数,如CanId, DLC和数据。基于CAN硬件缓冲区抽象,每个硬件对象在CAN if中被引用,而不依赖于CAN硬件缓冲区的布局。HOH在CanDrv的接口服务调用中用作参数,由CanDrv的配置提供,并由CanDrv用作CAN邮箱通信缓冲区的标识符。
CanIf仅作为硬件对象句柄的用户,但不根据硬件特定信息对其进行解释。因此CanIf仍然独立于硬件。
3.3 Static L-PDUs
CanIf为上层提供了对CAN L-SDU相关数据的通用访问.
CanIf应将每个L-PDU只分配给一个CAN控制器。因此,禁止将单个l - pdu分配给多个CAN控制器。
CanIf支持激活和反激活属于一个CAN Controller 所有的 l - pdu CAN控制器用于发送和接收。
3.4 Dynamic L-PDUs
CANIF 支持 通过CanIfRxPduCanIdMask 来过滤ID。
3.4.1 Dynamic Transmit L-PDUs
Dynamic Transmit L-PDUs的定义:允许在运行时重新配置CanId (CanIfTxPduType)或将ID或其部分作为L-SDU的元数据。
3.4.2 Dynamic receive L-PDUs
Dynamic receive L-PDUs的定义:与一组Can Id对应的l -PDU,其中实际接收到的Can Id作为PDU数据的一部分提供给上层。
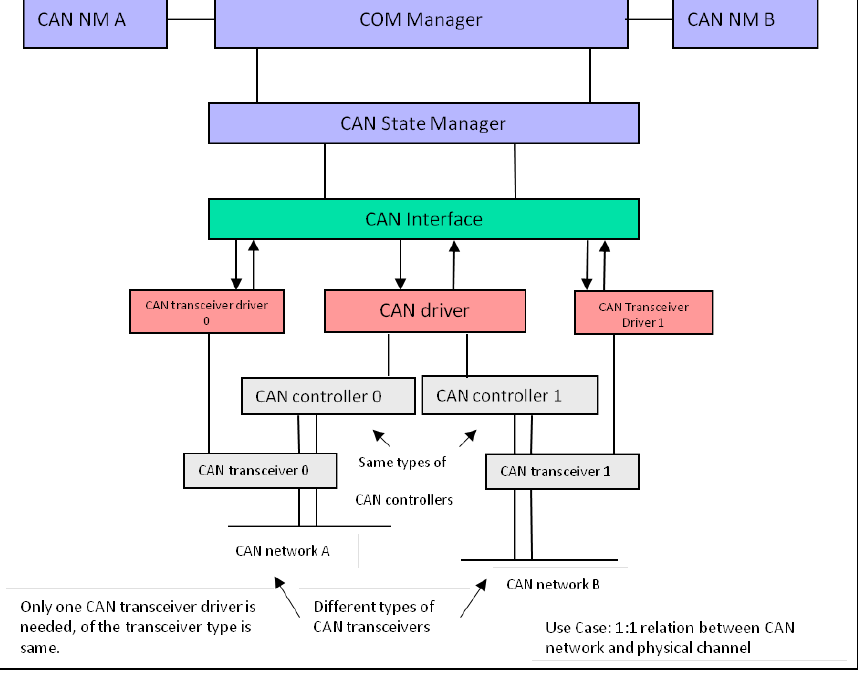
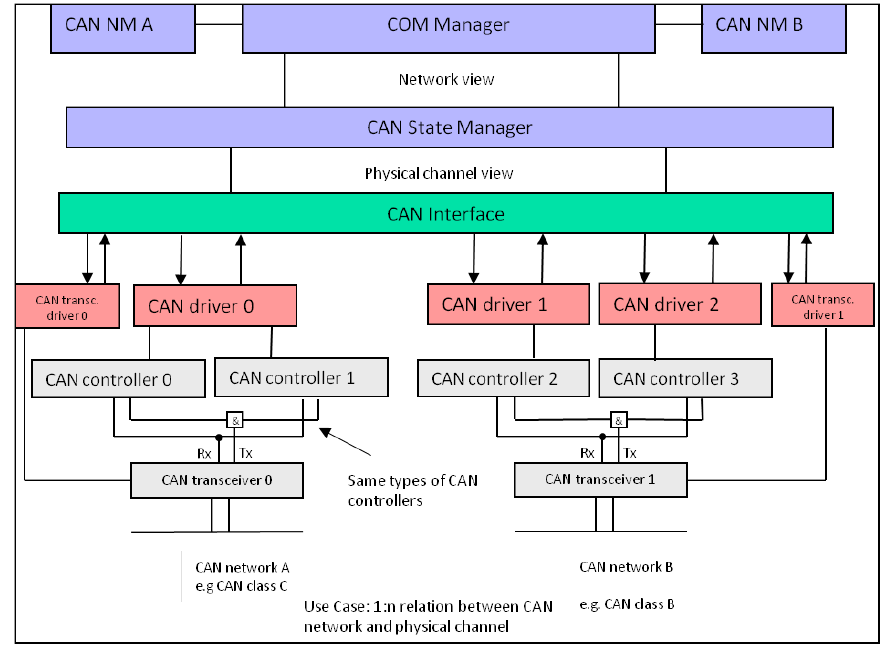
3.5 Physical channel view
一个Physical channel 是由一个 CAN Controller 和一个 CAN Transceiver连接组成的。一个或多个Physical channel 连接到一个网络。
CanIf提供服务来控制所有CAN设备,例如CAN Controllers and CAN和Transceivers。CanSm使用这些api 服务向ComM提供网络观察结果,用于执行连接到单个网络的所有物理通道的唤醒和睡眠请求。
canIf传递由CanDrv和CanTrcv分别为每个物理通道提供的状态信息作为向上传递到CanSm的状态信息。
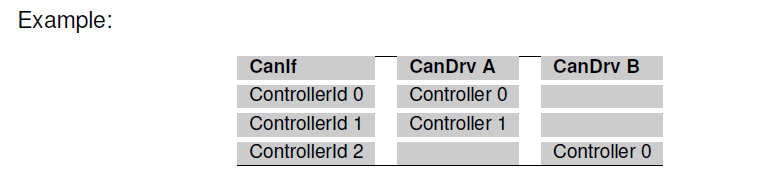
CanIf模块提供的Controller_Id,ID是对CanDrv instances的抽象,ID从0开始。
CanIf模块提供的Transceiver_Id,ID是对CanTrcv instances的抽象,ID从0开始。
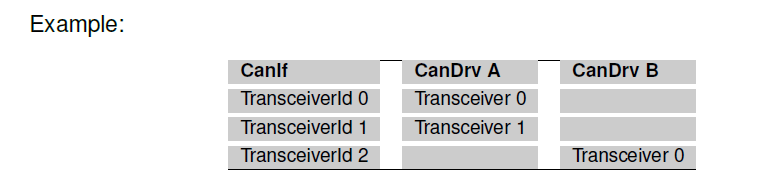
CanSm 通过上述抽象出来的ID 来讲通知与下面的 CanDrv CanTrcv 关联。
由于CANIF 独立于硬件层,所以canif 不会关心 下面连接的是哪类硬件(高速can或者低速CAN ),有几个硬件。
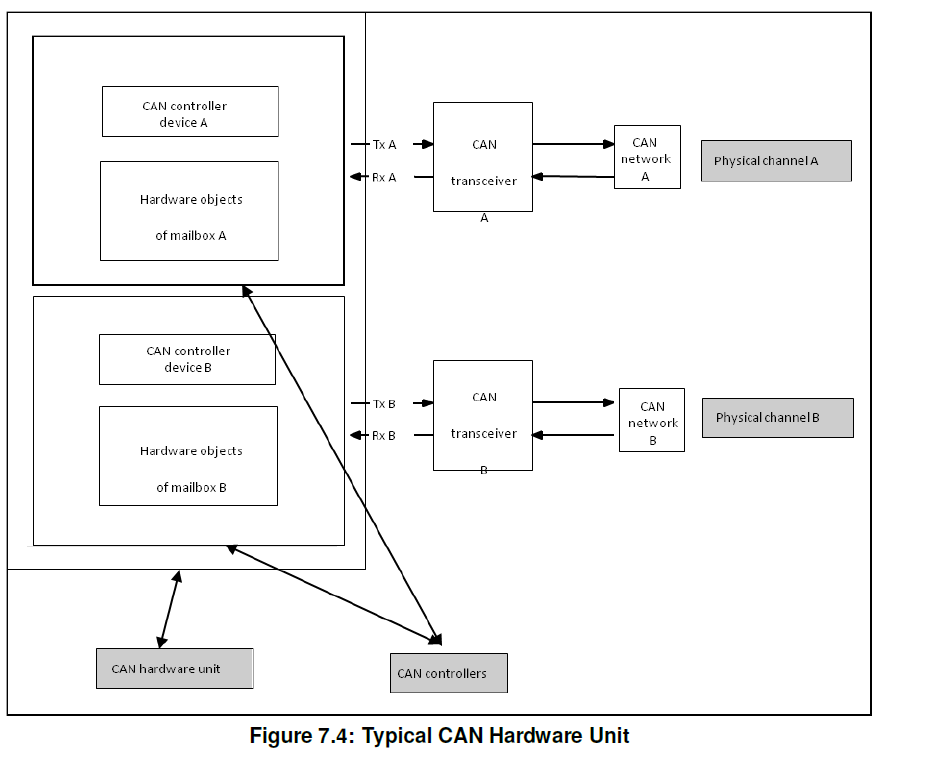
3.6 CAN Hardware Unit
CAN Hardware Unit 由一个或多个相同类型的CAN控制器模块组成,这些模块可以位于芯片上,也可以作为外部独立设备。每一个 CAN Hardware Unit 由相应的CanDrv提供服务.
如果不同的CAN Controllers被使用,那么不同类型的CanDrvs就会被使用,但是CanIf模块提供了统一的API。CanIf模块在配置中收集了CAN Controller以及Hardware Objects的抽象信息(object ID,类型等)
3.7 BasicCAN and FullCAN reception
[AutoSar]BSW_Com09 CAN driver 模块FULL(BASIC)CAN、FIFO选择
3.8 Initialization
通过CanIf_Init() 初始化。
3.9 Transmit request
CanIf模块提供CanIf_Transmit()公共接口给上层模块(CAN TP 、PDUR 等),用来传递L-PDU。上层模块只能通过CanIf_Transmit()接口来启动数据传输服务,而不能直接访问CAN driver。
调用CanIf_Transmit()接口的时候,CanIf模块执行下述的Action:
检查,初始化CanIf模块状态
识别CanDrv(有多个CanDrvs被使用)
确定访问CAN硬件传输对象的HTH
调用CanDrv的Can_Write()函数
传输成功返回E_OK
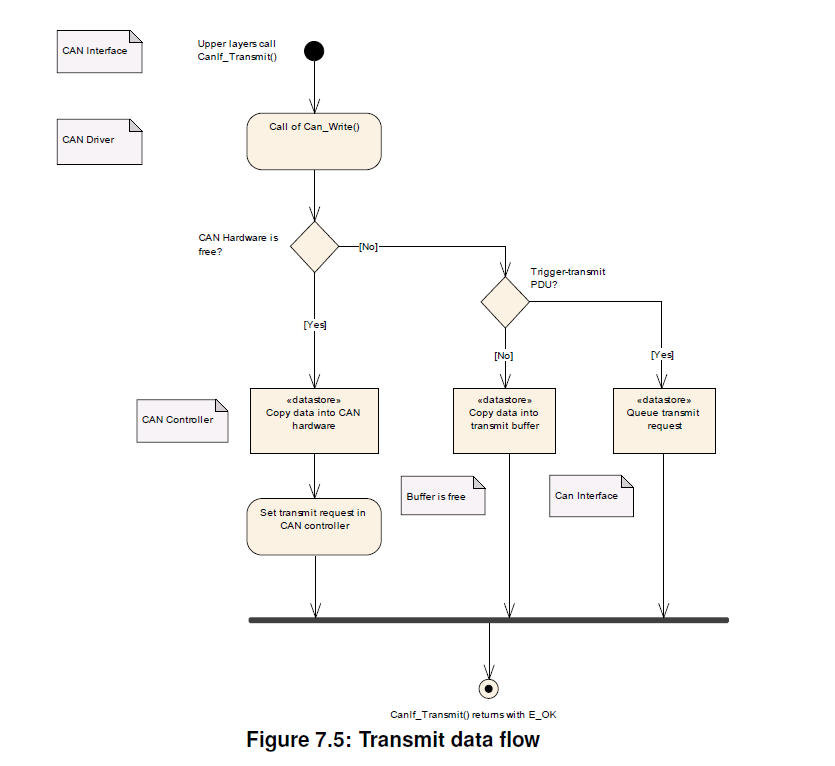
3.10 Transmit data flow
[AutoSar]BSW_Com06 CAN报文应用层到Can总线的函数调用
传输服务CanIf_Transmit()是基于L-PDUs的。通过L-PDU数据结构中L-SDU ID和指向L-SDU数据的指针可以访问/获取L-SDU数据。
CanIf存储关于为发送任务配置的可用硬件对象的信息。函数CanIf_Transmit()将CanTxPduId映射到相应的HTH并调用函数Can_Write()。
3.11 Transmit buffering
3.11.1 General behavior
在CanIf的作用域中,传输进程以调用CanIf_Transmit()开始,并以调用上层模块的回调服务结束 < User_TxConfirmation >()。在发送过程中,CanIf、CanDrv和CAN Mailbox应将只发送一次的L-PDU存储在一个位置。根据传输方法的不同,它们是: Can硬件发送邮箱或者是CanIf模块中L-PDU发送buffer(如果发送缓存使能了)。
对于触发传输,CanIf只需要存储给定L-PDU的传输请求,而不需要存储其数据。当HTH空闲(再次空闲)时,通过触发传输函数及时获取数据。传输的单个Tx L-PDU的请求不应存储两次。这种行为与CAN网络上通常的周期性通信方式相对应。
如果发送缓冲被启用,CanIf将在CanIf发送L-PDU缓冲区(CanIfBufferCfg)中存储一个Tx L-PDU,如果它在发送请求时被canrv拒绝。
3.11.2 Storage of L-PDUs in the transmit L-PDU buffer
如果CanDrv在调用Can_Write()时返回CAN_BUSY, CanIf尝试只在发送L-PDU缓冲区中存储一个新的发送L-PDU或它的发送请求。
3.11.3 Initialization of transmit L-PDU buffers
CanIf_Init()函数被调用后,CanIf完成发送L-PDU Buffer的初始化。
3.12 Transmit confirmation
如果之前的传输请求成功完成,CanDrv通过调用CanIf_TxConfirmation()将其通知给CanIf。
3.13 Receive data flow
根据AUTOSAR基本软件架构,接收到的数据将在上层通信栈(即AUTOSAR COM、CanNm、CanTp、DCM)中进行评估和处理。这意味着,上层模块既不能与CanDrv (Rx)的缓冲区一起工作(即改变),也不能访问CanIf (Tx)的缓冲区.
只有当CanIf_PUBLIC_READRXPDU_DATA_API设置为TRUE时,CanIf才能在接收路径中提供内部缓冲。
如果新接收到一个L-PDU, CanDrv调用CanIf的CanIf_RxIndication()。L-PDU特定数据的访问由以下参数实现: 硬件接收句柄(HRH),接收CAN ID,接收CAN数据长度,接收到的L-PDU数据的引用(指针)。
CAN硬件接收对象被锁定,直到数据复制到临时或上层模块缓冲区的过程结束。在CanIf的CanIf_RxIndication()返回后,硬件对象将立即被释放,以避免数据丢失。
[AutoSar]BSW_Com07 CAN报文接收流程的函数调用
3.14 Receive indication
对CanIf_RxIndication()的调用在其参数中引用了一个新接收到的CAN L-PDU。如果调用了CanIf_RxIndication()函数,CanIf将评估CAN L-PDU是否接受,并为上层通信层随后的访问准备L-SDU。如果配置了该CAN L-PDU,并且该CAN L-PDU被成功检测并接受进行进一步处理,则CanIf使用<User_RxIndication>()通知上层模块关于此异步事件。
如果CanTrv中调用CanIf_RxIndication函数,CanIf执行一下操作:
软件过滤(可配置)
DLC检查(可配置)
缓冲区接收L-SDU(可配置)
调用上层提供的接收通知回调函数(可配置)
3.15 Read received data
读接收数据接口CanIf_ReadRxPduData()是上层模块读取最近从CAN网络接收到的CAN l - sdu的通用接口。上层模块仅通过CanIf服务发起接收请求,而不直接访问CanDrv。如果CanIf将收到的L-SDU写入上层模块I-PDU缓冲区,则表示接收请求成功完成。
3.16 Read Tx/Rx notification status
除了通知回调函数,CanIf提供API服务CanIf_ReadTxNotifStatus()来读取任何发送L-SDU的发送确认状态,并提供API服务CanIf_ReadRxNotifStatus()来读取任何接收L-SDU的接收指示状态。
3.17 Data integrity
基本原理:尝试更新上层模块缓冲区以及CanIf内部缓冲区中的数据,必须考虑到在中断服务程序或其他抢占事件的上下文中可能发生的更改。抢占事件可能发生在抢占任务,多个CAN中断,如果使用多个物理通道,例如网关,或者在其他外设或网络系统中断的情况下,需要在网络上发送和接收l - pdu。
如果在CanIf模块中调用CanIf_Transmit()、CanIf_TxConfirmation()和CanIf_ReadRxPduData()函数从CanIf controlled内存区域读取数据,CanIf应保证提供的值是最近获得的值。
如果CanIf被配置为使用传输缓冲区或接收缓冲区,CanIf_Transmit()、CanIf_TxConfirmation()和CanIf_ReadRxPduData()函数只访问CanIf控制的内存区域的数据。
3.18 CAN Controller Mode
CanIf模块提供服务控制CAN Controllers的模式。提供CanIf_GetControllerMode()获取 CAN Controllers的模式,提供CanIf_SetControllerMode()设置CAN Controller模式。
CanSM模块负责一个CAN网络上所有CAN Controllers一致性管理。CanSM负责设置一个网络上的所有CAN Controllers按顺序的进入休眠或者唤醒
3.18.1 CAN Controller Operation Modes
ControllerID标识的当前CAN网络如果处于CAN_CS_STOPPED状态,那么通过该网路调用CanIf_Transmit()函数将返回E_NOT_OK,不会调用Can_Write()函数。同时还会清除掉CanIf中的发送缓存。同时还会调用<User_TxConfirmation>(id, E_NOT_OK)同时上层发送数据失败。
3.18.2 Controller Mode Transitions
CAN控制器的状态更改请求API以异步的方式通过回调服务发出异步通知。
根据CAN控制器硬件中转换请求的设置,真实的转换到请求模式是异步发生的,例如,请求睡眠转换CAN_CS_SLEEP。成功更改为例如CAN_CS_SLEEP模式后,CanDrv调用函数CanIf_ControllerModeIndication(), CanIf依次调用函数<User_ControllerModeIndication>()。如果CAN传输非常快,CanIf_ControllerModeIndication()可以CanIf_SetControllerMode()期间调用。
CanIf的上层模块可以通过CanIf_GetControllerMode()轮询当前的控制器模式.
3.18.4 Wake-up
ECU支持通过CAN网络唤醒,无论使用哪种唤醒方法(直接关于CAN控制器或CAN收发器),只有当CAN控制器和CAN收发器设置为某种“侦听唤醒”模式时。这通常是一个睡眠模式,通常的通信被禁用。只有这种模式才能确保CAN控制器处于停止状态。因此,可以启用唤醒中断。
3.18.4.1 Wake-up detection
如果启用了唤醒支持,CanIf通过集成代码检测到CanIf_CheckWakeup()服务的CAN唤醒。
在CAN总线“wake-up”事件中,在执行EcuM_CheckWakeup(WakeupSource)时,可能会调用CanIf_CheckWakeup(WakeupSource)函数。CanIf反过来通过配置输入引用来检查CanDrvs中的EcuMWakeupSource,这是必须检查的CanDrvs。CanIf通过引用CanIfCtrlCanCtrlRef获取此信息。
被调用的通信服务属于配置期间定义的服务。通过这种方式,EcuM和CanSM能够改变CAN控制器状态,并控制与BusOff恢复或唤醒过程相关的系统行为。
3.18.4.2 Wake-up Validation
当CAN控制器/ CAN收发器检测到总线唤醒事件时,将直接通知ECU状态管理器。如果需要验证这样的唤醒事件,EcuM(或CDD)打开对应的 CAN Controller (CanIf_SetControllerMode())和CAN Transceiver (CanIf_SetTrcvMode())。
当“PDU Channel Mode”设置为“CanIf_ONLINE”或“CanIf_TX_OFFLINE”时,CanIf将接收到的消息通知上层模块。因此,如果需要唤醒验证,则不需要将PDU通道模式设置为CanIf_ONLINE或CanIf_TX_OFFLINE。
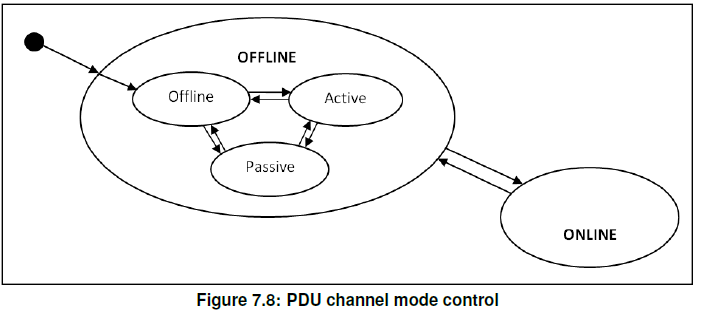
3.19 PDU channel mode control
每个L-PDU被分配到一个专用的物理CAN通道,这个物理CAN通道连接到一个CAN Controller和一个CAN网络。通过这种方式,以处理单个逻辑L-PDU通道组的方式来控制一个组里面的所有L-PDU。这些逻辑组代表了连接到一个下层网络的所有的L-PDU。
3.19.1 PDU channel modes
CanIf模块提供CanIf_SetPduMode()和CanIf_GetPduMode()服务来设置和获取CAN通道模式。
只能在某个CAN通道处于CAN_CS_STARTED模式下才能改变通道模式。
CanIf_ONLINE 和CanIf_OFFLINE会影响PDU通道的整个通信过程(收/发),CanIf_TX_OFFLINE 和 CanIf_TX_OFFLINE_ACTIVE模式分别关闭/打开PDU的发生。
每路PDU通道可以在CAN_OFFLINE模式(没有通信),CanIf_TX_OFFLINE(passive mode 能收不能发)模式,CanIf_TX_OFFLINE_ACTIVE(模拟发送但不收),CanIf_ONLINE(完全通信模式)。
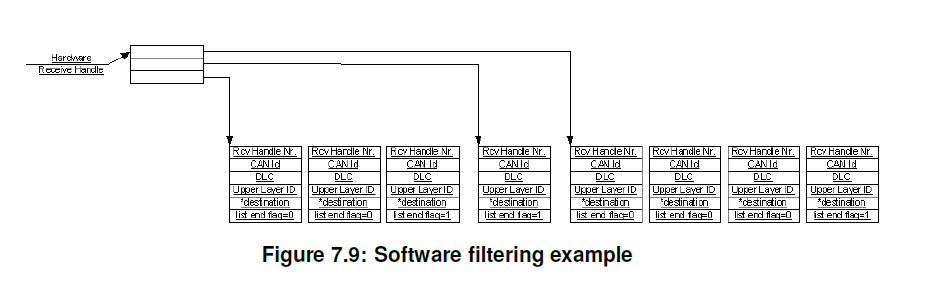
3.20 Software receive filter
并不是所有的L-PDU都被定义为Receive L-PDU,Receive L-PDU需要从相应的ECU接收,这些L-PDU可以通过硬件接收滤波器,因此在BasicCAN硬件对象中被成功接收。CanIf可选地过滤掉这些L-PDU并禁止进一步的软件处理。
软件过滤机制的方法是从正在处理的HRH和CanId中找出相应的L-PDU。找到L-PDU后,CanIf接受接收到的L-PDU,上层可以直接访问L-SDU信息。
3.20.1 Software filtering concept
配置工具处理有关硬件接受过滤器设置的信息。最重要的设置是L-PDU硬件对象的数量和范围。输出范围定义了接收哪些l - pdu属于每个硬件接收对象。
3.21 Data Length Check
将收到的数据长度值与配置的数据长度值进行比较。配置的Data Length值应从该L-PDU中使用的字节大小中得出。所配置的数据长度值不一定是CAN通信矩阵中定义并由该CAN L-PDU的发送方使用的数据长度值。
>>>>>回到总目录<<<<<<
这篇关于[AutoSar]BSW_Com010 CAN IF 模块介绍的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




