本文主要是介绍【NR 定位】3GPP NR Positioning 5G定位标准解读(十)-增强的小区ID定位,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
3GPP NR Positioning 5G定位标准:3GPP TS 38.305 V18
3GPP 标准网址:Directory Listing /ftp/
【NR 定位】3GPP NR Positioning 5G定位标准解读(一)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(二)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(三)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(四)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(五)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(六)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(七)- GNSS定位方法-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(八)- OTDOA定位-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(九)-增强的小区ID定位-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(十)-增强的小区ID定位-CSDN博客
8.7 TBS定位
8.7.1 概述
地面信标系统(TBS)是地面发射机网络的标准通用术语,该网络广播用于广域或区域覆盖的地理空间定位信号。本规范版本支持以下TBS:
- 都市信标系统(MBS)。
注意:基于PRS的TBS是下行链路OTDOA定位的一部分,并在第8.2条中描述。
支持三种定位模式:
- UE辅助:UE在网络辅助或无网络辅助的情况下执行TBS测量,并将这些测量值发送到位置管理功能(LMF)进行计算,可能会使用来自其他(非TBS)源的额外测量值;
- 基于UE:UE执行TBS测量并计算其自身位置,可能会使用来自其他(非TBS)源的额外测量值。
- 独立:UE在无网络辅助的情况下执行TBS测量并计算其自身位置,可能会使用来自其他(非TBS)源的额外测量值。
8.7.2 在NG-RAN/5GC元素之间要传输的信息
8.7.2.0 概述
本条款定义了可能在LMF和UE之间传输的信息。
8.7.2.1 可能从LMF传输到UE的信息
8.7.2.1.0 概述
表8.7.2.1.0-1列出了可能从LMF发送到UE的UE辅助和基于UE模式的辅助数据。
注意:这些辅助数据元素的提供和UE对这些元素的使用分别取决于NG-RAN/5GC和UE的能力。
Table 8.7.2.1.0-1: Information that may be transferred from the LMF to UE
| Assistance Data |
| Acquisition assistance |
| Almanac |
8.7.2.1.1 采集辅助
采集辅助为MBS接收器提供有关可见信标、PN码以及MBS信号的其他信息,以实现MBS信号的快速采集。
8.7.2.1.2 星历表
星历表辅助为MBS接收器提供可用于确定UE位置的MBS信标参数。
8.7.2.2 可能从UE传输到LMF的信息
8.7.2.2.0 概述
可能从UE信号传输到LMF的信息汇总在表8.7.2.2.0-1中。
Table 8.7.2.2.0-1: Information that may be transferred from UE to the LMF
| Information | UE‑assisted | UE-based/ Standalone |
| UE position estimate with uncertainty shape | No | Yes |
| Timestamp | Yes | Yes |
| Indication of used positioning methods in the fix | No | Yes |
| TBS measurements (code phase (MBS)) | Yes | No |
| Measurement quality parameters for each measurement | Yes | No |
8.7.2.2.1 独立模式
在独立模式下,UE会报告纬度、经度以及可能的高度,如果可用的话还会报告位置不确定性的估计值。
UE还应报告一个指示,表明使用了TBS方法以及可能用于计算定位的其他定位方法。
8.7.2.2.2 UE辅助模式
在UE辅助模式下,UE会报告与TBS相关的测量值以及相关的质量估计。这些测量值使LMF能够计算UE的位置,可能还会使用其他测量值和数据。
8.7.2.2.3 基于UE的模式
在基于UE的模式下,UE会报告纬度和经度,如果可用的话还会报告位置不确定性的估计值。
UE还应报告一个指示,表明使用了TBS方法以及可能用于计算定位的其他定位方法。
8.7.3 TBS定位程序
8.7.3.1 能力传输程序
TBS定位的能力传输程序在第7.1.2.1条中描述。
8.7.3.2 辅助数据传输程序
8.7.3.2.0 概述
此程序的目的是使LMF能够向UE提供辅助数据(例如,作为定位程序的一部分),并使UE能够向LMF请求辅助数据(例如,作为定位程序的一部分)。
8.7.3.2.1 LMF发起的辅助数据传送
图8.7.3.2.1-1显示了当程序由LMF发起时,网络辅助TBS方法的辅助数据传送操作。

Figure 8.7.3.2.1-1: LMF-initiated Assistance Data Delivery Procedure
(1) LMF确定需要向UE提供辅助数据(例如,作为定位程序的一部分),并向UE发送LPP提供辅助数据消息。此消息可能包含第8.7.2.1条中定义的任何TBS辅助数据。
8.7.3.2.2 UE发起的辅助数据传输
图8.7.3.2.2-1显示了当程序由UE发起时,网络辅助TBS方法的辅助数据传输操作。
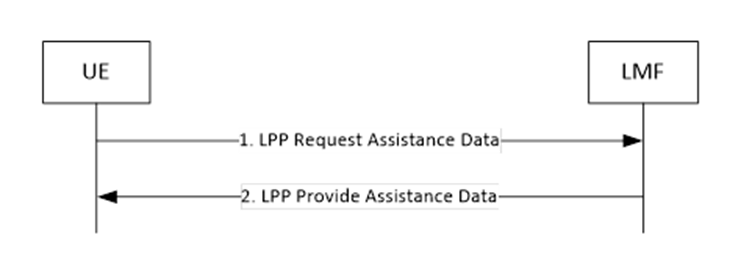
Figure 8.7.3.2.2-1: UE-initiated Assistance Data Transfer Procedure
(1) UE确定需要某些TBS辅助数据(例如,当LMF提供的辅助数据不足以满足UE的请求时),并向LMF发送LPP请求辅助数据消息。此请求包含所请求的特定TBS辅助数据的指示。
(2) 如果LMF处有可用的请求辅助数据,LMF将在LPP提供辅助数据消息中提供该数据。整个辅助数据集可以在一条或多条LPP消息中传送。在这种情况下,LMF可以多次重复此步骤。如果在第2步中没有提供UE在第1步中请求的任何辅助数据,则UE应假定所请求的辅助数据不受支持,或者当前在LMF处不可用。如果LMF无法提供UE在第1步中请求的任何辅助数据,则返回可以在提供辅助数据类型的LPP消息中提供的任何信息,其中包括未提供辅助数据的原因指示。
8.7.3.3 位置信息传输程序
8.7.3.3.0 概述
此程序的目的是使LMF能够请求UE的位置测量或位置估计,或使UE能够提供位置测量给LMF以进行位置计算。
8.7.3.3.1 LMF发起的位置信息传输程序
图8.7.3.3.1-1显示了当程序由LMF发起时,TBS方法的位置信息传输操作。
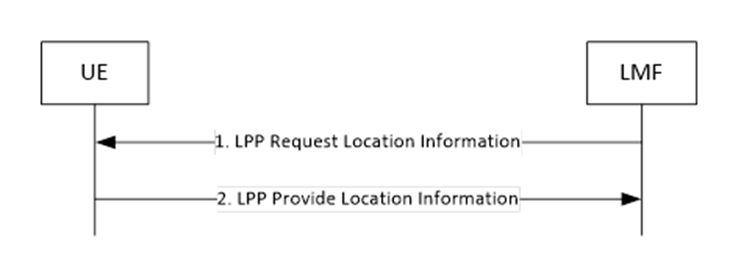
Figure 8.7.3.3.1-1: LMF-initiated Location Information Transfer Procedure
(1) LMF向UE发送LPP请求位置信息消息,以调用TBS定位。该请求包括定位指令,如定位模式(UE辅助、基于UE、独立)、如果有特定的UE测量请求以及服务质量参数(准确度、响应时间)。
(2) UE执行所请求的测量并可能计算其自身的位置。UE在第(1)步中提供的响应时间到期之前向LMF发送LPP提供位置信息消息。如果UE无法执行所请求的测量,或者如果第1步中提供的响应时间在任何所请求的测量被获得之前到期,UE返回可以在类型为“提供位置信息”的LPP消息中提供的任何信息,其中包括未提供位置信息的原因指示。
8.7.3.3.2 UE发起的位置信息交付程序
图8.7.3.3.2-1显示了当程序由UE发起时,TBS方法的位置信息交付操作。
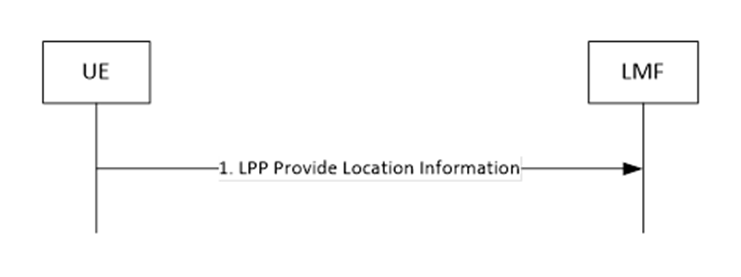
Figure 8.7.3.3.2-1: UE-initiated Location Information Delivery Procedure
(1) UE向LMF发送LPP提供位置信息消息。提供的位置信息消息可能包括UE的TBS测量值或UE已可用的位置估计值。
这篇关于【NR 定位】3GPP NR Positioning 5G定位标准解读(十)-增强的小区ID定位的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






