本文主要是介绍MWORKS来了(一)| 体验焕然一新的智能建模,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
“做工程师最爱的桌面软件”
Sysplorer作为MWORKS家族的老大哥,在追求卓越的路上不断前行。这次,Sysplorer 2022再升级,带来焕然一新的智能建模体验。

Sysplorer提供了易用的图形化建模仿真环境和强大的连续离散混合求解引擎,Syslab则为算法设计开发提供了高效的编程环境,两者的打通与融合,为CPS系统设计、建模与仿真提供了更全面的支持。
一方面,Sysplorer可充分利用Syslab在科学计算方面的优势,在仿真模型中直接调用Syslab算法或函数,极大拓展模型的算法开发能力;同时模型可以直接访问Syslab工作空间中的变量,便于数据集中管理与引用。
另一方面,在Syslab中可直接操作仿真模型得到仿真结果,以批处理或并行计算的方式,支持复杂系统的试验设计、优化分析、数据处理及结果可视化等工作,大幅提升基于模型的分析与设计能力。

建模操控更智能
智能对齐、自动等距、智能大小、智能连接和拖拽克隆等新功能,为用户带来更加极致的建模体验,一次性治好你的强迫症。
◎ 智能对齐
◎ 智能连接
◎ 拖拽克隆
◎ 格式刷![]()
工具面板更易用
参数面板和输出面板都做了优化改进,而且所有可停靠面板支持一键开关,功能触手可及。
◎ 参数面板改进
支持重声明参数和记录参数的层次化展开设置。
◎ 输出面板改进
信息分类显示,能够过滤不同级别的信息,快速诊断模型错误,更支持在大量的输出信息中搜索关键字。
◎ 可停靠面板升级
一键收起所有面板,扩展工作区间。触手可及的面板开关,使用时又能随时打开,还支持自动隐藏等多种精细的显示模式。
内核再升级
仿真控制更可靠。新增接续仿真功能,方便在既有的超大规模仿真结果基础上继续开展仿真,极大节约仿真时间。
◎ 接续仿真
打开已有的仿真实例接续仿真,并支持仿真结果定时分阶段保存,减少因意外中断造成的数据损坏。
◎ 新增求解算法,并支持分段设定步长
新增单对角隐式龙格-库塔(4阶)、显式单对角隐式龙格-库塔(3阶、4阶、5阶)两类积分算法,支持分段固定步长,以便高效模拟采样步长急剧变化的场景。
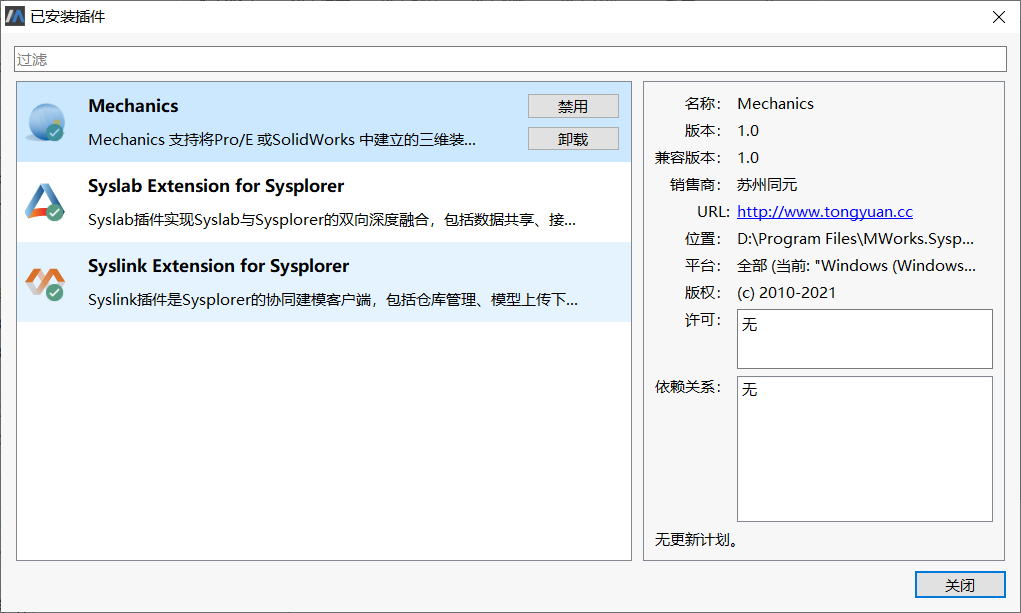
Sysplorer具备完整开放的API和插件机制,以支持各行业领域专用工具箱的扩展开发。这一次,插件管理功能大增强,提供了插件管理器。独立的插件安装程序,安装后可以在Sysplorer的插件管理器中查看、启用/禁用和卸载插件。
了解更多MWORKS信息,欢迎关注1月8日同元软控MWORKS 2022产品发布会!
原文查看:MWORKS来了(一)| 体验焕然一新的智能建模持续打造全球领先的多领域统一建模仿真软件https://mp.weixin.qq.com/s/sX76keCoxbivluh0MHF1og
这篇关于MWORKS来了(一)| 体验焕然一新的智能建模的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







