本文主要是介绍ROS小龟控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
roscore
//重新打开一个终端
rosrun turtlesim
rosrun turtlesim turtlesim_node
//再重新打开一个终端
rosrun turtlesim turtle_teleop_key
//
rqt_graph//显示系统计算过程的工具
//
rosnode//查看node相关内容
rostopic//查看topic相关内容
rosservice//查看service相关内容
rosservice call /spawn //生成第二个海龟
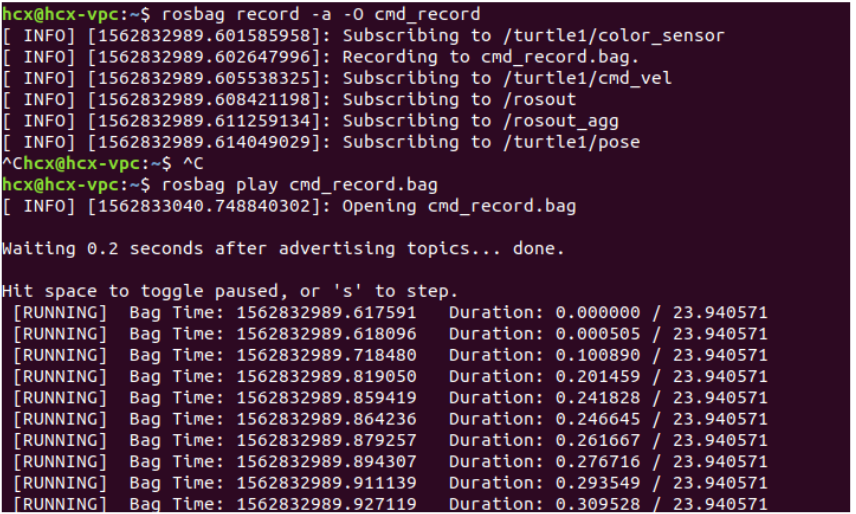 话题记录和复现
话题记录和复现
这篇关于ROS小龟控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




