本文主要是介绍从零开始学习Diffusion Models: Sharon Zhou,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
How Diffusion Models Work
本文是 https://www.deeplearning.ai/short-courses/how-diffusion-models-work/ 这门课程的学习笔记。
文章目录
- How Diffusion Models Work
- What you’ll learn in this course
- [1] Intuition
- [2] Sampling
- Setting Things Up
- Sampling
- Demonstrate incorrectly sample without adding the 'extra noise'
- Acknowledgments
- [3] Neural Network
- [4] Training
- Setting Things Up
- Training
- Sampling
- View Epoch 0
- View Epoch 4
- View Epoch 8
- View Epoch 31
- [5] Controlling
- Setting Things Up
- Context
- Sampling with context
- [6] Speeding up
- Setting Things Up
- Fast Sampling
- Compare DDPM, DDIM speed
- 后记
How Diffusion Models Work:Sharon Zhou
What you’ll learn in this course
In How Diffusion Models Work, you will gain a deep familiarity with the diffusion process and the models which carry it out. More than simply pulling in a pre-built model or using an API, this course will teach you to build a diffusion model from scratch.
In this course you will:
- Explore the cutting-edge world of diffusion-based generative AI and create your own diffusion model from scratch.
- Gain deep familiarity with the diffusion process and the models driving it, going beyond pre-built models and APIs.
- Acquire practical coding skills by working through labs on sampling, training diffusion models, building neural networks for noise prediction, and adding context for personalized image generation.
At the end of the course, you will have a model that can serve as a starting point for your own exploration of diffusion models for your applications.
This one-hour course, taught by Sharon Zhou will expand your generative AI capabilities to include building, training, and optimizing diffusion models.
Hands-on examples make the concepts easy to understand and build upon. Built-in Jupyter notebooks allow you to seamlessly experiment with the code and labs presented in the course.
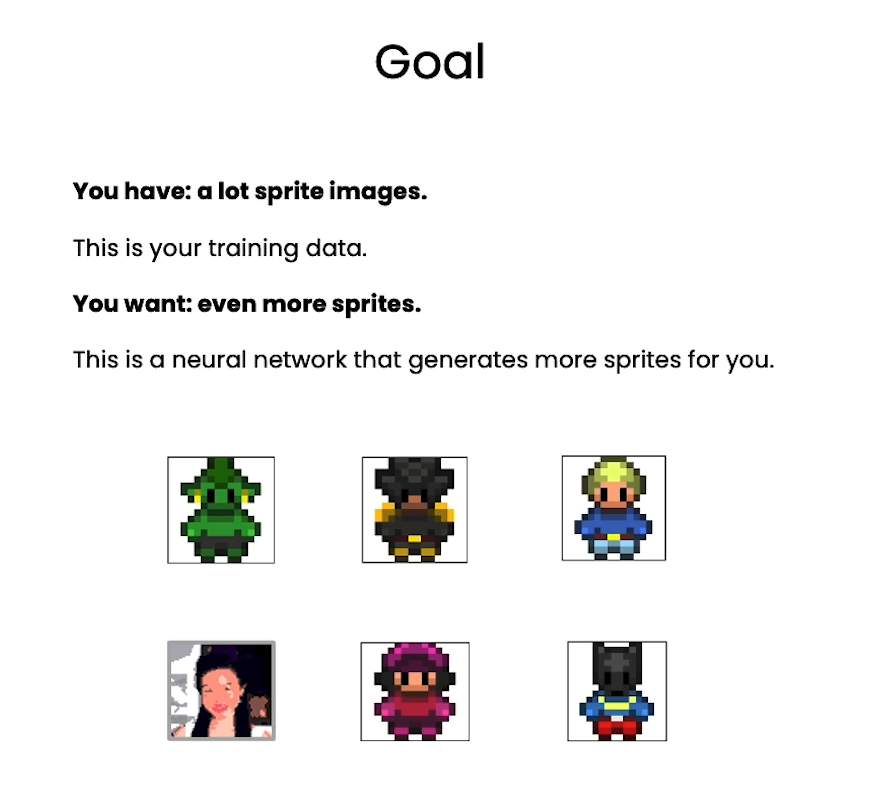
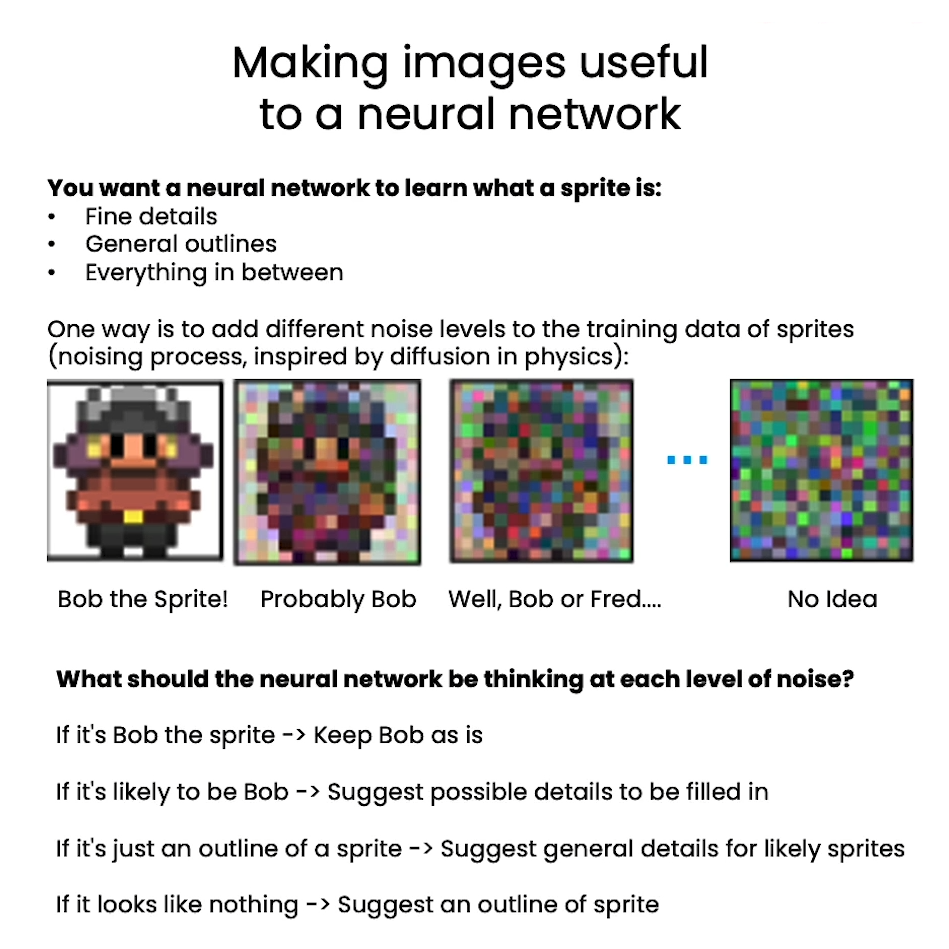
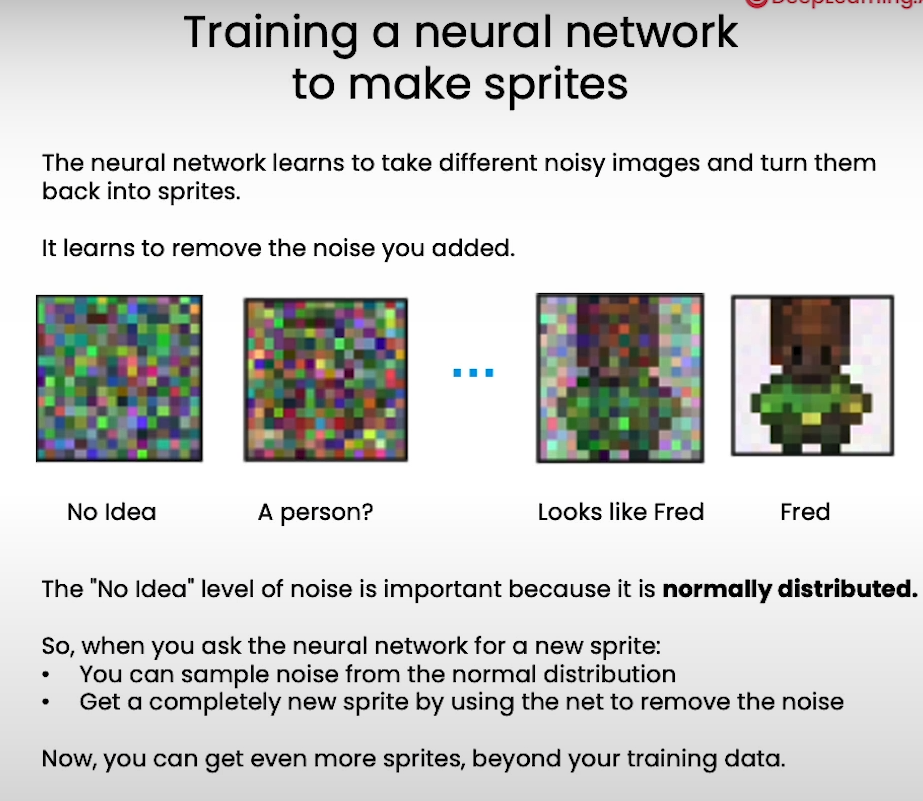
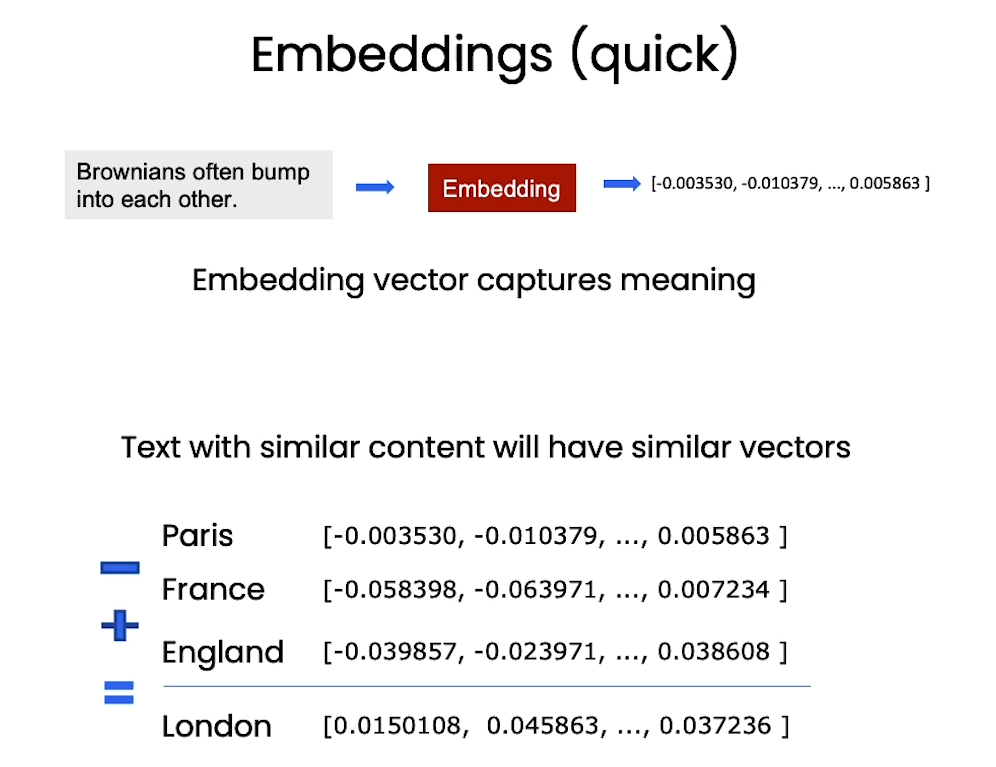
[1] Intuition
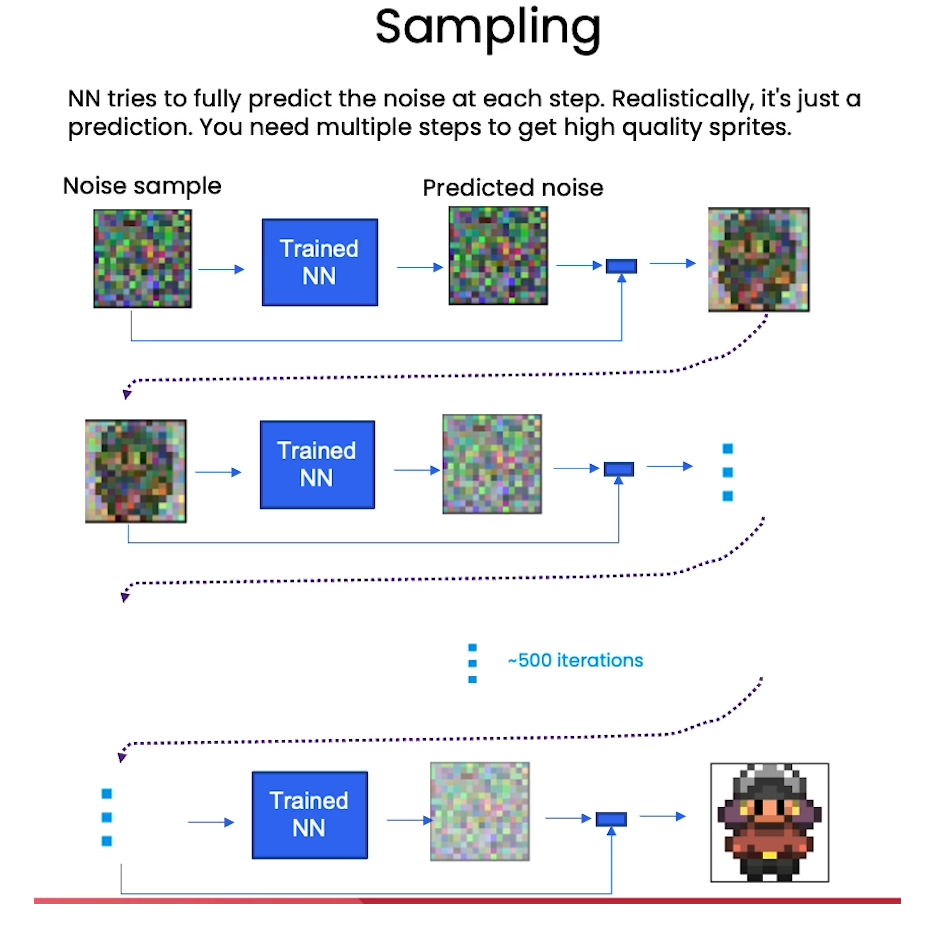
[2] Sampling
from typing import Dict, Tuple
from tqdm import tqdm
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader
from torchvision import models, transforms
from torchvision.utils import save_image, make_grid
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation, PillowWriter
import numpy as np
from IPython.display import HTML
from diffusion_utilities import *
Setting Things Up
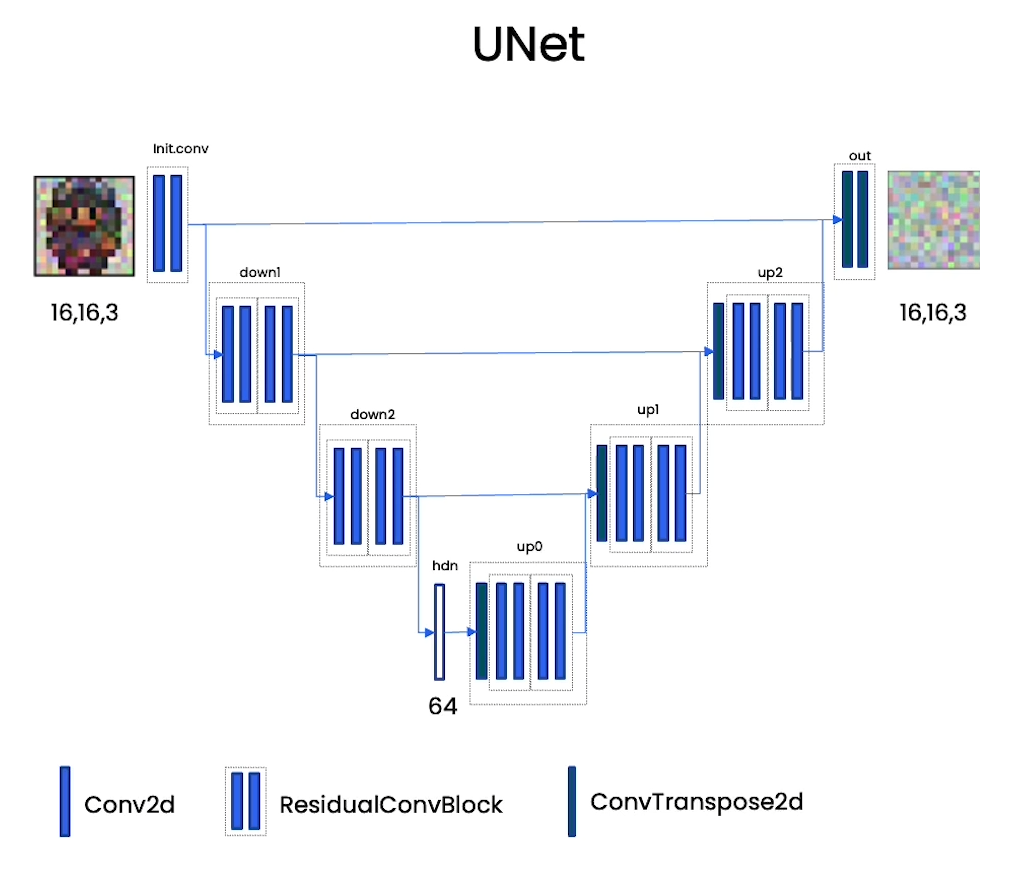
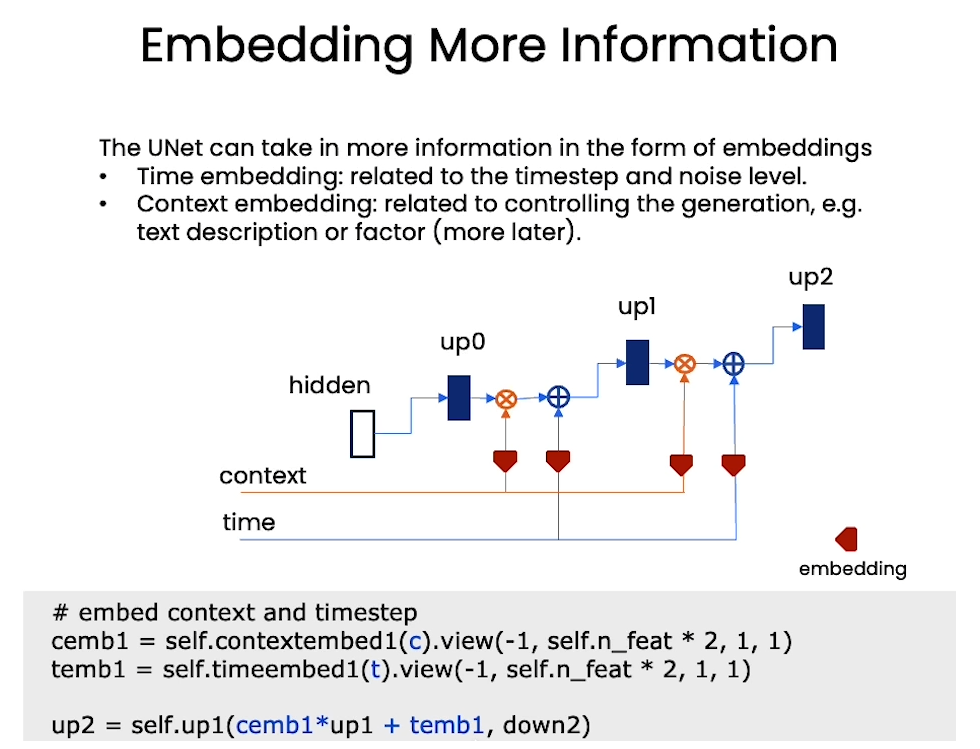
class ContextUnet(nn.Module):def __init__(self, in_channels, n_feat=256, n_cfeat=10, height=28): # cfeat - context featuressuper(ContextUnet, self).__init__()# number of input channels, number of intermediate feature maps and number of classesself.in_channels = in_channelsself.n_feat = n_featself.n_cfeat = n_cfeatself.h = height #assume h == w. must be divisible by 4, so 28,24,20,16...# Initialize the initial convolutional layerself.init_conv = ResidualConvBlock(in_channels, n_feat, is_res=True)# Initialize the down-sampling path of the U-Net with two levelsself.down1 = UnetDown(n_feat, n_feat) # down1 #[10, 256, 8, 8]self.down2 = UnetDown(n_feat, 2 * n_feat) # down2 #[10, 256, 4, 4]# original: self.to_vec = nn.Sequential(nn.AvgPool2d(7), nn.GELU())self.to_vec = nn.Sequential(nn.AvgPool2d((4)), nn.GELU())# Embed the timestep and context labels with a one-layer fully connected neural networkself.timeembed1 = EmbedFC(1, 2*n_feat)self.timeembed2 = EmbedFC(1, 1*n_feat)self.contextembed1 = EmbedFC(n_cfeat, 2*n_feat)self.contextembed2 = EmbedFC(n_cfeat, 1*n_feat)# Initialize the up-sampling path of the U-Net with three levelsself.up0 = nn.Sequential(nn.ConvTranspose2d(2 * n_feat, 2 * n_feat, self.h//4, self.h//4), # up-sample nn.GroupNorm(8, 2 * n_feat), # normalize nn.ReLU(),)self.up1 = UnetUp(4 * n_feat, n_feat)self.up2 = UnetUp(2 * n_feat, n_feat)# Initialize the final convolutional layers to map to the same number of channels as the input imageself.out = nn.Sequential(nn.Conv2d(2 * n_feat, n_feat, 3, 1, 1), # reduce number of feature maps #in_channels, out_channels, kernel_size, stride=1, padding=0nn.GroupNorm(8, n_feat), # normalizenn.ReLU(),nn.Conv2d(n_feat, self.in_channels, 3, 1, 1), # map to same number of channels as input)def forward(self, x, t, c=None):"""x : (batch, n_feat, h, w) : input imaget : (batch, n_cfeat) : time stepc : (batch, n_classes) : context label"""# x is the input image, c is the context label, t is the timestep, context_mask says which samples to block the context on# pass the input image through the initial convolutional layerx = self.init_conv(x)# pass the result through the down-sampling pathdown1 = self.down1(x) #[10, 256, 8, 8]down2 = self.down2(down1) #[10, 256, 4, 4]# convert the feature maps to a vector and apply an activationhiddenvec = self.to_vec(down2) # hiddenvec 的维度应该为 [10, 256, 1, 1]# AvgPool2d((4)) 操作:#这个操作是一个平均池化(Average Pooling)层,将特征图的每个 4x4 区域的值取平均。由于特征图 down2 的维度为 [10, 256, 4, 4],经过 #AvgPool2d((4)) 操作后,每个特征图将被降采样为一个单一的值。因此,输出的形状将变为 [10, 256, 1, 1]。# mask out context if context_mask == 1if c is None:c = torch.zeros(x.shape[0], self.n_cfeat).to(x)# embed context and timestepcemb1 = self.contextembed1(c).view(-1, self.n_feat * 2, 1, 1) # (batch, 2*n_feat, 1,1)temb1 = self.timeembed1(t).view(-1, self.n_feat * 2, 1, 1)cemb2 = self.contextembed2(c).view(-1, self.n_feat, 1, 1)temb2 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)print(f"uunet forward: cemb1 {cemb1.shape}. temb1 {temb1.shape}, cemb2 {cemb2.shape}. temb2 {temb2.shape}")# uunet forward: cemb1 torch.Size([32, 128, 1, 1]). # temb1 torch.Size([1, 128, 1, 1]), # cemb2 torch.Size([32, 64, 1, 1]). # temb2 torch.Size([1, 64, 1, 1])up1 = self.up0(hiddenvec) # hiddenvec 的维度应该为 [10, 256, 1, 1]up2 = self.up1(cemb1*up1 + temb1, down2) # add and multiply embeddingsup3 = self.up2(cemb2*up2 + temb2, down1)out = self.out(torch.cat((up3, x), 1))return out根据代码和已知信息,我们可以推断 up1, up2, up3 和 out 的输出维度如下:
-
对于
up1:- 输入是
hiddenvec,其形状为(batch_size, n_feat, 1, 1)。 up0中的转置卷积操作会将输入进行上采样,输出的形状将与down2的特征图相同,即(batch_size, 2*n_feat, h/4, w/4)。
- 输入是
-
对于
up2:- 输入是
cemb1 * up1 + temb1,其中cemb1的形状为(batch_size, 2*n_feat, 1, 1),up1的形状为(batch_size, 2*n_feat, h/4, w/4),temb1的形状为(batch_size, 2*n_feat, 1, 1)。 - 这些张量相加后,其形状应该仍然是
(batch_size, 2*n_feat, h/4, w/4)。 up1中的上采样操作将输出的特征图大小恢复为原来的一半,因此,up2的输出形状将是(batch_size, n_feat, h/2, w/2)。
- 输入是
-
对于
up3:- 输入是
cemb2 * up2 + temb2,其中cemb2的形状为(batch_size, n_feat, 1, 1),up2的形状为(batch_size, n_feat, h/2, w/2),temb2的形状为(batch_size, n_feat, 1, 1)。 - 这些张量相加后,其形状应该仍然是
(batch_size, n_feat, h/2, w/2)。 up2中的上采样操作将输出的特征图大小恢复为原来的一半,因此,up3的输出形状将是(batch_size, n_feat, h, w)。
- 输入是
-
对于
out:- 输入是将
up3和原始输入x拼接在一起,up3的形状为(batch_size, n_feat, h, w),x的形状为(batch_size, in_channels, h, w)。 - 因此,拼接后输入通道的数量为
n_feat + in_channels。 out的输出形状应该是(batch_size, in_channels, h, w),与原始输入的图像大小相同。
- 输入是将
综上所述,up1 的输出形状为 (batch_size, 2*n_feat, h/4, w/4),up2 的输出形状为 (batch_size, n_feat, h/2, w/2),up3 的输出形状为 (batch_size, n_feat, h, w),而 out 的输出形状应该是 (batch_size, in_channels, h, w)。
有用的函数:diffusion_utilities.py文件如下
import torch
import torch.nn as nn
import numpy as np
from torchvision.utils import save_image, make_grid
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation, PillowWriter
import os
import torchvision.transforms as transforms
from torch.utils.data import Dataset
from PIL import Imageclass ResidualConvBlock(nn.Module):def __init__(self, in_channels: int, out_channels: int, is_res: bool = False) -> None:super().__init__()# Check if input and output channels are the same for the residual connectionself.same_channels = in_channels == out_channels# Flag for whether or not to use residual connectionself.is_res = is_res# First convolutional layerself.conv1 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 3, 1, 1), # 3x3 kernel with stride 1 and padding 1nn.BatchNorm2d(out_channels), # Batch normalizationnn.GELU(), # GELU activation function)# Second convolutional layerself.conv2 = nn.Sequential(nn.Conv2d(out_channels, out_channels, 3, 1, 1), # 3x3 kernel with stride 1 and padding 1nn.BatchNorm2d(out_channels), # Batch normalizationnn.GELU(), # GELU activation function)def forward(self, x: torch.Tensor) -> torch.Tensor:# If using residual connectionif self.is_res:# Apply first convolutional layerx1 = self.conv1(x)# Apply second convolutional layerx2 = self.conv2(x1)# If input and output channels are the same, add residual connection directlyif self.same_channels:out = x + x2else:# If not, apply a 1x1 convolutional layer to match dimensions before adding residual connectionshortcut = nn.Conv2d(x.shape[1], x2.shape[1], kernel_size=1, stride=1, padding=0).to(x.device)out = shortcut(x) + x2#print(f"resconv forward: x {x.shape}, x1 {x1.shape}, x2 {x2.shape}, out {out.shape}")# Normalize output tensorreturn out / 1.414# If not using residual connection, return output of second convolutional layerelse:x1 = self.conv1(x)x2 = self.conv2(x1)return x2# Method to get the number of output channels for this blockdef get_out_channels(self):return self.conv2[0].out_channels# Method to set the number of output channels for this blockdef set_out_channels(self, out_channels):self.conv1[0].out_channels = out_channelsself.conv2[0].in_channels = out_channelsself.conv2[0].out_channels = out_channelsclass UnetUp(nn.Module):def __init__(self, in_channels, out_channels):super(UnetUp, self).__init__()# Create a list of layers for the upsampling block# The block consists of a ConvTranspose2d layer for upsampling, followed by two ResidualConvBlock layerslayers = [nn.ConvTranspose2d(in_channels, out_channels, 2, 2),ResidualConvBlock(out_channels, out_channels),ResidualConvBlock(out_channels, out_channels),]# Use the layers to create a sequential modelself.model = nn.Sequential(*layers)def forward(self, x, skip):# Concatenate the input tensor x with the skip connection tensor along the channel dimensionx = torch.cat((x, skip), 1)# Pass the concatenated tensor through the sequential model and return the outputx = self.model(x)return xclass UnetDown(nn.Module):def __init__(self, in_channels, out_channels):super(UnetDown, self).__init__()# Create a list of layers for the downsampling block# Each block consists of two ResidualConvBlock layers, followed by a MaxPool2d layer for downsamplinglayers = [ResidualConvBlock(in_channels, out_channels), ResidualConvBlock(out_channels, out_channels), nn.MaxPool2d(2)]# Use the layers to create a sequential modelself.model = nn.Sequential(*layers)def forward(self, x):# Pass the input through the sequential model and return the outputreturn self.model(x)class EmbedFC(nn.Module):def __init__(self, input_dim, emb_dim):super(EmbedFC, self).__init__()'''This class defines a generic one layer feed-forward neural network for embedding input data ofdimensionality input_dim to an embedding space of dimensionality emb_dim.'''self.input_dim = input_dim# define the layers for the networklayers = [nn.Linear(input_dim, emb_dim),nn.GELU(),nn.Linear(emb_dim, emb_dim),]# create a PyTorch sequential model consisting of the defined layersself.model = nn.Sequential(*layers)def forward(self, x):# flatten the input tensorx = x.view(-1, self.input_dim)# apply the model layers to the flattened tensorreturn self.model(x)测试ResidualConvBlock类
import torch
import torch.nn as nn# 创建一个ResidualConvBlock实例
residual_block = ResidualConvBlock(in_channels=3, out_channels=3, is_res=True)# 创建一个测试输入张量
x = torch.randn(1, 3, 32, 32) # 假设输入张量的形状为(batch_size, in_channels, height, width)# 使用ResidualConvBlock进行前向传播
output = residual_block(x)print(output.shape)这个例子假设输入张量的形状是 (1, 3, 32, 32),即一个 3 通道、高度和宽度均为 32 像素的图像。在这个例子中,我们使用了残差连接,并且输入和输出通道数量相同。我们预期输出应该与输入张量的形状相同 (1, 3, 32, 32)。
# hyperparameters# diffusion hyperparameters
timesteps = 500
beta1 = 1e-4
beta2 = 0.02# network hyperparameters
device = torch.device("cuda:0" if torch.cuda.is_available() else torch.device('cpu'))
n_feat = 64 # 64 hidden dimension feature
n_cfeat = 5 # context vector is of size 5
height = 16 # 16x16 image
save_dir = './weights/'
# construct DDPM noise schedule
b_t = (beta2 - beta1) * torch.linspace(0, 1, timesteps + 1, device=device) + beta1
a_t = 1 - b_t
ab_t = torch.cumsum(a_t.log(), dim=0).exp()
ab_t[0] = 1
# construct model
nn_model = ContextUnet(in_channels=3, n_feat=n_feat, n_cfeat=n_cfeat, height=height).to(device)
Sampling
# helper function; removes the predicted noise (but adds some noise back in to avoid collapse)
def denoise_add_noise(x, t, pred_noise, z=None):if z is None:z = torch.randn_like(x)noise = b_t.sqrt()[t] * zmean = (x - pred_noise * ((1 - a_t[t]) / (1 - ab_t[t]).sqrt())) / a_t[t].sqrt()return mean + noise
# load in model weights and set to eval mode
nn_model.load_state_dict(torch.load(f"{save_dir}/model_trained.pth", map_location=device))
nn_model.eval()
print("Loaded in Model")
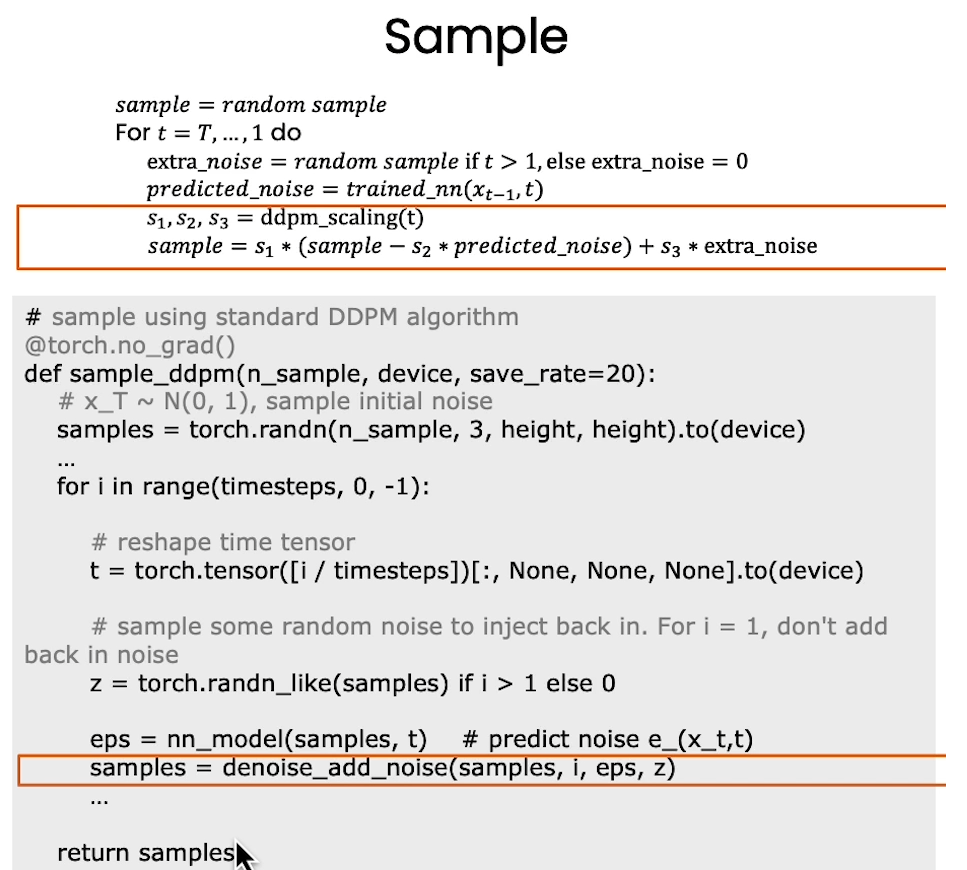
# sample using standard algorithm
@torch.no_grad()
def sample_ddpm(n_sample, save_rate=20):# x_T ~ N(0, 1), sample initial noisesamples = torch.randn(n_sample, 3, height, height).to(device) # array to keep track of generated steps for plottingintermediate = [] for i in range(timesteps, 0, -1):print(f'sampling timestep {i:3d}', end='\r')# reshape time tensort = torch.tensor([i / timesteps])[:, None, None, None].to(device)# sample some random noise to inject back in. For i = 1, don't add back in noisez = torch.randn_like(samples) if i > 1 else 0eps = nn_model(samples, t) # predict noise e_(x_t,t)samples = denoise_add_noise(samples, i, eps, z)if i % save_rate ==0 or i==timesteps or i<8:intermediate.append(samples.detach().cpu().numpy())intermediate = np.stack(intermediate)return samples, intermediate
# visualize samples
plt.clf()
samples, intermediate_ddpm = sample_ddpm(32)
animation_ddpm = plot_sample(intermediate_ddpm,32,4,save_dir, "ani_run", None, save=False)
HTML(animation_ddpm.to_jshtml())
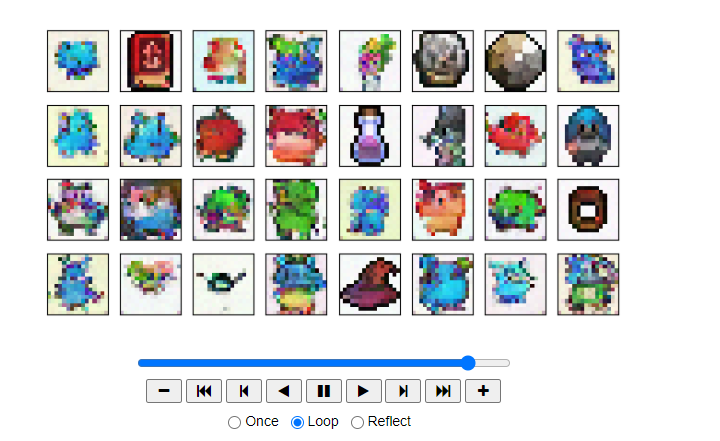
Output
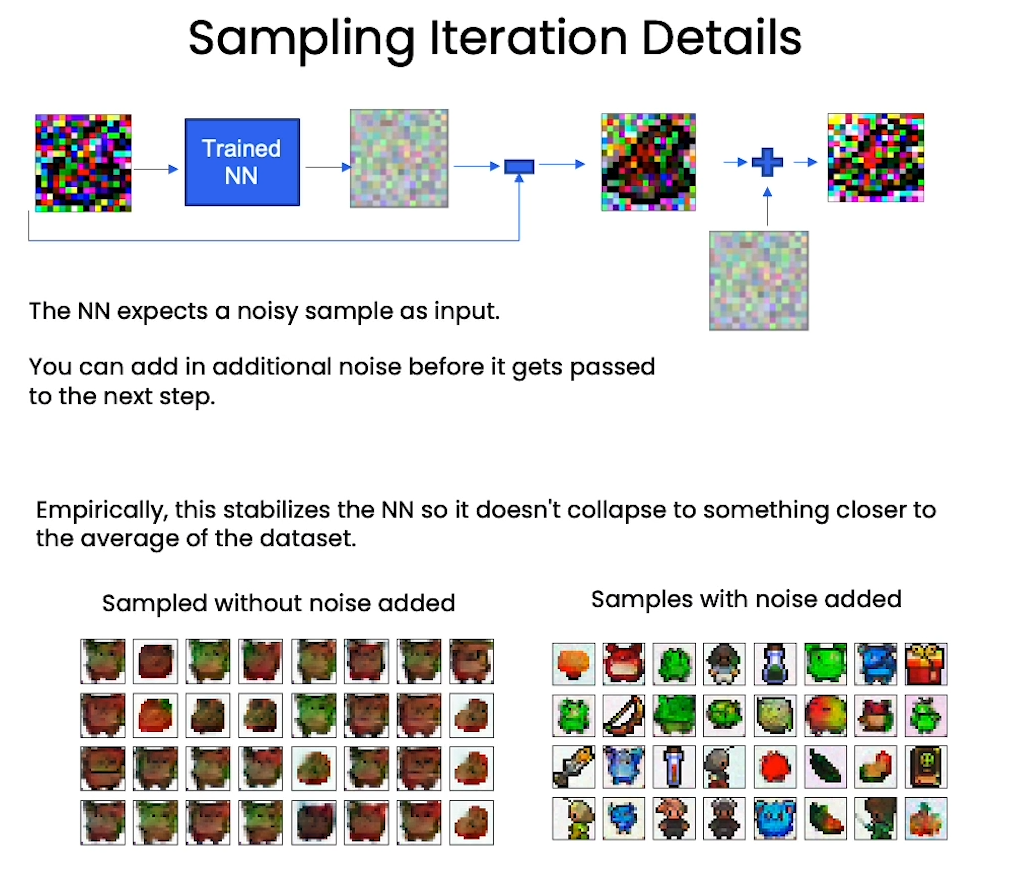
Demonstrate incorrectly sample without adding the ‘extra noise’
# incorrectly sample without adding in noise
@torch.no_grad()
def sample_ddpm_incorrect(n_sample):# x_T ~ N(0, 1), sample initial noisesamples = torch.randn(n_sample, 3, height, height).to(device) # array to keep track of generated steps for plottingintermediate = [] for i in range(timesteps, 0, -1):print(f'sampling timestep {i:3d}', end='\r')# reshape time tensor# [:, None, None, None] 是一种广播操作,用于在 PyTorch 中扩展张量的维度。# 这段代码的作用是创建一个时间张量 t,该张量的形状为 (1, 1, 1, 1)t = torch.tensor([i / timesteps])[:, None, None, None].to(device)# don't add back in noisez = 0eps = nn_model(samples, t) # predict noise e_(x_t,t)samples = denoise_add_noise(samples, i, eps, z)if i%20==0 or i==timesteps or i<8:intermediate.append(samples.detach().cpu().numpy())intermediate = np.stack(intermediate)return samples, intermediate
# visualize samples
plt.clf()
samples, intermediate = sample_ddpm_incorrect(32)
animation = plot_sample(intermediate,32,4,save_dir, "ani_run", None, save=False)
HTML(animation.to_jshtml())
Output
Acknowledgments
Sprites by ElvGames, FrootsnVeggies and kyrise
This code is modified from, https://github.com/cloneofsimo/minDiffusion
Diffusion model is based on Denoising Diffusion Probabilistic Models and Denoising Diffusion Implicit Models
[3] Neural Network
[4] Training

from typing import Dict, Tuple
from tqdm import tqdm
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader
from torchvision import models, transforms
from torchvision.utils import save_image, make_grid
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation, PillowWriter
import numpy as np
from IPython.display import HTML
from diffusion_utilities import *
Setting Things Up
class ContextUnet(nn.Module):def __init__(self, in_channels, n_feat=256, n_cfeat=10, height=28): # cfeat - context featuressuper(ContextUnet, self).__init__()# number of input channels, number of intermediate feature maps and number of classesself.in_channels = in_channelsself.n_feat = n_featself.n_cfeat = n_cfeatself.h = height #assume h == w. must be divisible by 4, so 28,24,20,16...# Initialize the initial convolutional layerself.init_conv = ResidualConvBlock(in_channels, n_feat, is_res=True)# Initialize the down-sampling path of the U-Net with two levelsself.down1 = UnetDown(n_feat, n_feat) # down1 #[10, 256, 8, 8]self.down2 = UnetDown(n_feat, 2 * n_feat) # down2 #[10, 256, 4, 4]# original: self.to_vec = nn.Sequential(nn.AvgPool2d(7), nn.GELU())self.to_vec = nn.Sequential(nn.AvgPool2d((4)), nn.GELU())# Embed the timestep and context labels with a one-layer fully connected neural networkself.timeembed1 = EmbedFC(1, 2*n_feat)self.timeembed2 = EmbedFC(1, 1*n_feat)self.contextembed1 = EmbedFC(n_cfeat, 2*n_feat)self.contextembed2 = EmbedFC(n_cfeat, 1*n_feat)# Initialize the up-sampling path of the U-Net with three levelsself.up0 = nn.Sequential(nn.ConvTranspose2d(2 * n_feat, 2 * n_feat, self.h//4, self.h//4), # up-sample nn.GroupNorm(8, 2 * n_feat), # normalize nn.ReLU(),)self.up1 = UnetUp(4 * n_feat, n_feat)self.up2 = UnetUp(2 * n_feat, n_feat)# Initialize the final convolutional layers to map to the same number of channels as the input imageself.out = nn.Sequential(nn.Conv2d(2 * n_feat, n_feat, 3, 1, 1), # reduce number of feature maps #in_channels, out_channels, kernel_size, stride=1, padding=0nn.GroupNorm(8, n_feat), # normalizenn.ReLU(),nn.Conv2d(n_feat, self.in_channels, 3, 1, 1), # map to same number of channels as input)def forward(self, x, t, c=None):"""x : (batch, n_feat, h, w) : input imaget : (batch, n_cfeat) : time stepc : (batch, n_classes) : context label"""# x is the input image, c is the context label, t is the timestep, context_mask says which samples to block the context on# pass the input image through the initial convolutional layerx = self.init_conv(x)# pass the result through the down-sampling pathdown1 = self.down1(x) #[10, 256, 8, 8]down2 = self.down2(down1) #[10, 256, 4, 4]# convert the feature maps to a vector and apply an activationhiddenvec = self.to_vec(down2)# mask out context if context_mask == 1if c is None:c = torch.zeros(x.shape[0], self.n_cfeat).to(x)# embed context and timestepcemb1 = self.contextembed1(c).view(-1, self.n_feat * 2, 1, 1) # (batch, 2*n_feat, 1,1)temb1 = self.timeembed1(t).view(-1, self.n_feat * 2, 1, 1)cemb2 = self.contextembed2(c).view(-1, self.n_feat, 1, 1)temb2 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)#print(f"uunet forward: cemb1 {cemb1.shape}. temb1 {temb1.shape}, cemb2 {cemb2.shape}. temb2 {temb2.shape}")up1 = self.up0(hiddenvec)up2 = self.up1(cemb1*up1 + temb1, down2) # add and multiply embeddingsup3 = self.up2(cemb2*up2 + temb2, down1)out = self.out(torch.cat((up3, x), 1))return out# hyperparameters# diffusion hyperparameters
timesteps = 500
beta1 = 1e-4
beta2 = 0.02# network hyperparameters
device = torch.device("cuda:0" if torch.cuda.is_available() else torch.device('cpu'))
n_feat = 64 # 64 hidden dimension feature
n_cfeat = 5 # context vector is of size 5
height = 16 # 16x16 image
save_dir = './weights/'# training hyperparameters
batch_size = 100
n_epoch = 32
lrate=1e-3
# construct DDPM noise schedule
b_t = (beta2 - beta1) * torch.linspace(0, 1, timesteps + 1, device=device) + beta1
a_t = 1 - b_t
ab_t = torch.cumsum(a_t.log(), dim=0).exp()
ab_t[0] = 1# construct model
nn_model = ContextUnet(in_channels=3, n_feat=n_feat, n_cfeat=n_cfeat, height=height).to(device)
Training
# load dataset and construct optimizer
dataset = CustomDataset("./sprites_1788_16x16.npy", "./sprite_labels_nc_1788_16x16.npy", transform, null_context=False)
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True, num_workers=1)
optim = torch.optim.Adam(nn_model.parameters(), lr=lrate)
Output
sprite shape: (89400, 16, 16, 3)
labels shape: (89400, 5)
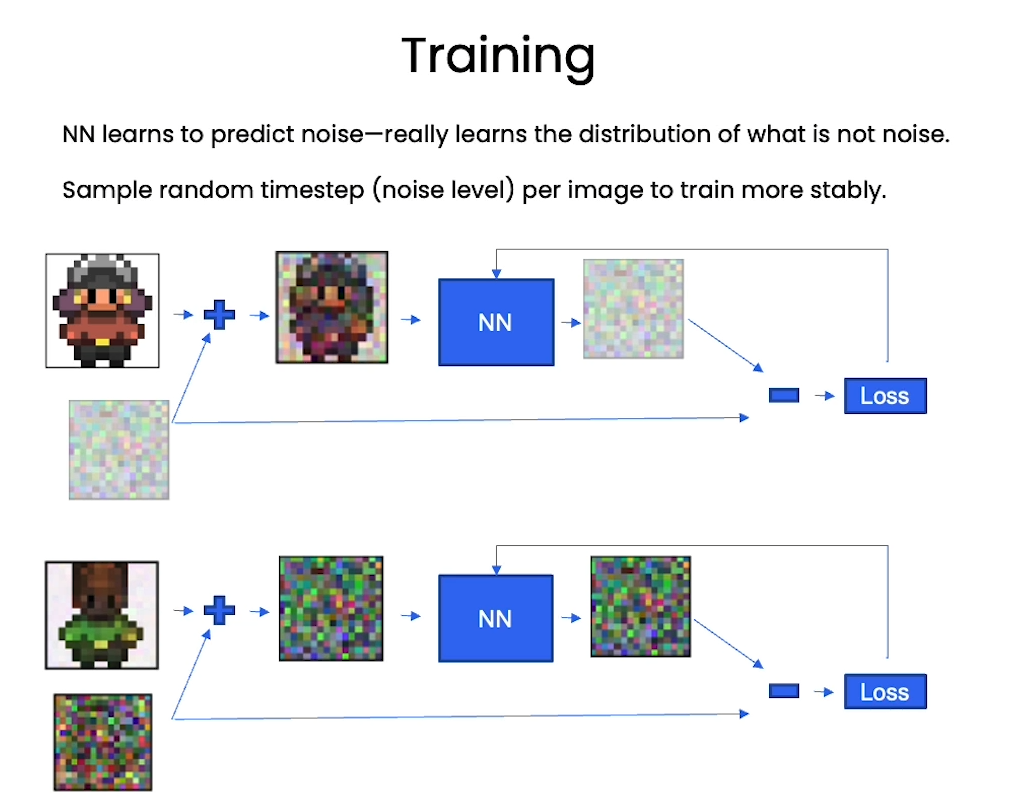
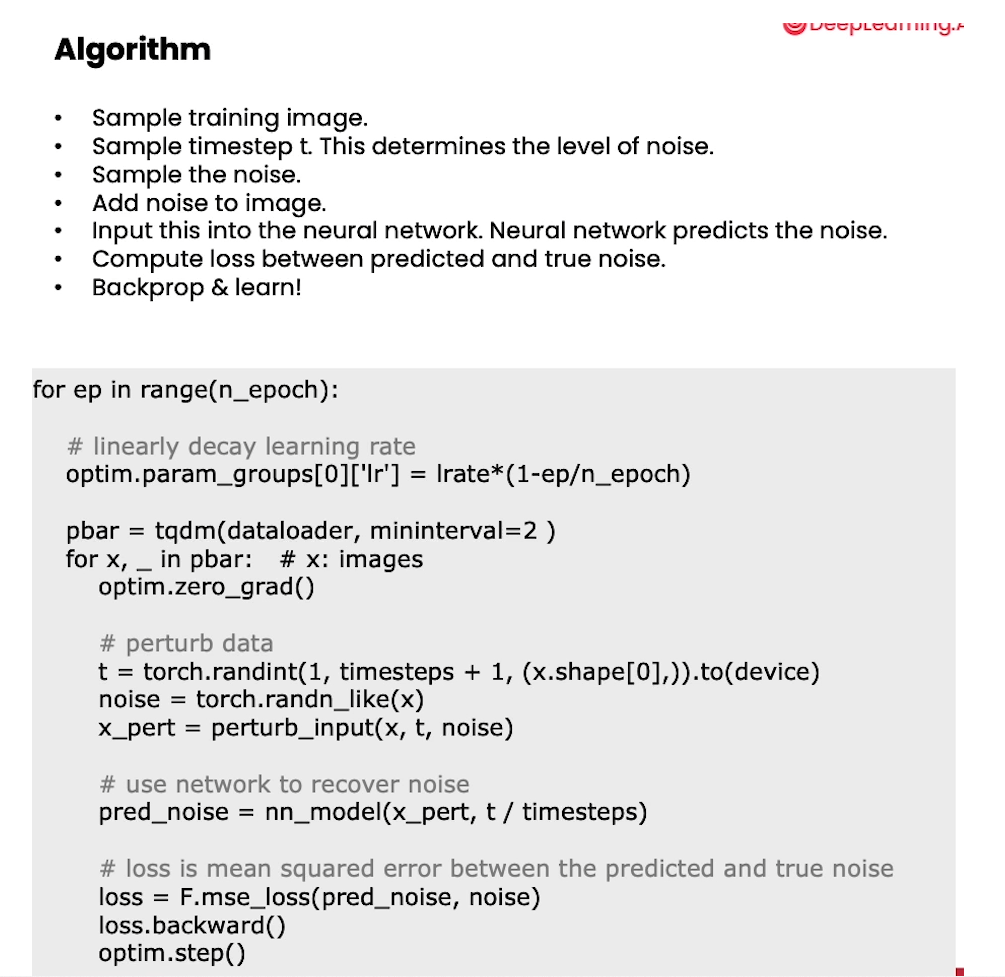
# helper function: perturbs an image to a specified noise level
def perturb_input(x, t, noise):return ab_t.sqrt()[t, None, None, None] * x + (1 - ab_t[t, None, None, None]) * noise
This code will take hours to run on a CPU. We recommend you skip this step here and check the intermediate results below.
If you decide to try it, you could download to your own machine. Be sure to change the cell type.
Note, the CPU run time in the course is limited so you will not be able to fully train the network using the class platform.
# training without context code# set into train mode
nn_model.train()for ep in range(n_epoch):print(f'epoch {ep}')# linearly decay learning rateoptim.param_groups[0]['lr'] = lrate*(1-ep/n_epoch)pbar = tqdm(dataloader, mininterval=2 )for x, _ in pbar: # x: imagesoptim.zero_grad()x = x.to(device)# perturb datanoise = torch.randn_like(x)t = torch.randint(1, timesteps + 1, (x.shape[0],)).to(device) x_pert = perturb_input(x, t, noise)# use network to recover noisepred_noise = nn_model(x_pert, t / timesteps)# loss is mean squared error between the predicted and true noiseloss = F.mse_loss(pred_noise, noise)loss.backward()optim.step()# save model periodicallyif ep%4==0 or ep == int(n_epoch-1):if not os.path.exists(save_dir):os.mkdir(save_dir)torch.save(nn_model.state_dict(), save_dir + f"model_{ep}.pth")print('saved model at ' + save_dir + f"model_{ep}.pth")
Sampling
# helper function; removes the predicted noise (but adds some noise back in to avoid collapse)
def denoise_add_noise(x, t, pred_noise, z=None):if z is None:z = torch.randn_like(x)noise = b_t.sqrt()[t] * zmean = (x - pred_noise * ((1 - a_t[t]) / (1 - ab_t[t]).sqrt())) / a_t[t].sqrt()return mean + noise
# sample using standard algorithm
@torch.no_grad()
def sample_ddpm(n_sample, save_rate=20):# x_T ~ N(0, 1), sample initial noisesamples = torch.randn(n_sample, 3, height, height).to(device) # array to keep track of generated steps for plottingintermediate = [] for i in range(timesteps, 0, -1):print(f'sampling timestep {i:3d}', end='\r')# reshape time tensort = torch.tensor([i / timesteps])[:, None, None, None].to(device)# sample some random noise to inject back in. For i = 1, don't add back in noisez = torch.randn_like(samples) if i > 1 else 0eps = nn_model(samples, t) # predict noise e_(x_t,t)samples = denoise_add_noise(samples, i, eps, z)if i % save_rate ==0 or i==timesteps or i<8:intermediate.append(samples.detach().cpu().numpy())intermediate = np.stack(intermediate)return samples, intermediate
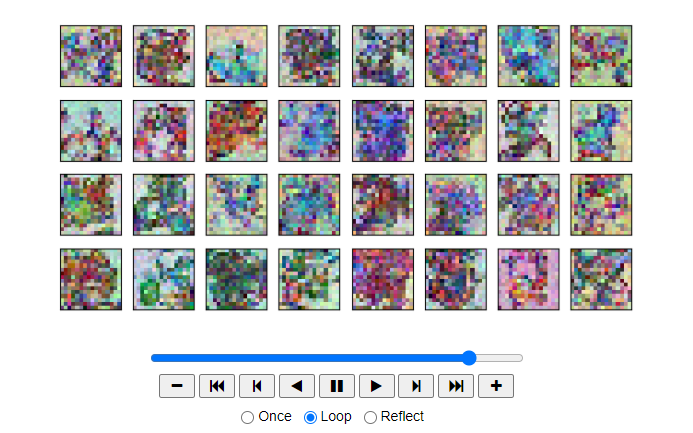
View Epoch 0
# load in model weights and set to eval mode
nn_model.load_state_dict(torch.load(f"{save_dir}/model_0.pth", map_location=device))
nn_model.eval()
print("Loaded in Model")
# visualize samples
plt.clf()
samples, intermediate_ddpm = sample_ddpm(32)
animation_ddpm = plot_sample(intermediate_ddpm,32,4,save_dir, "ani_run", None, save=False)
HTML(animation_ddpm.to_jshtml())
Output
View Epoch 4
# load in model weights and set to eval mode
nn_model.load_state_dict(torch.load(f"{save_dir}/model_4.pth", map_location=device))
nn_model.eval()
print("Loaded in Model")# visualize samples
plt.clf()
samples, intermediate_ddpm = sample_ddpm(32)
animation_ddpm = plot_sample(intermediate_ddpm,32,4,save_dir, "ani_run", None, save=False)
HTML(animation_ddpm.to_jshtml())
Output
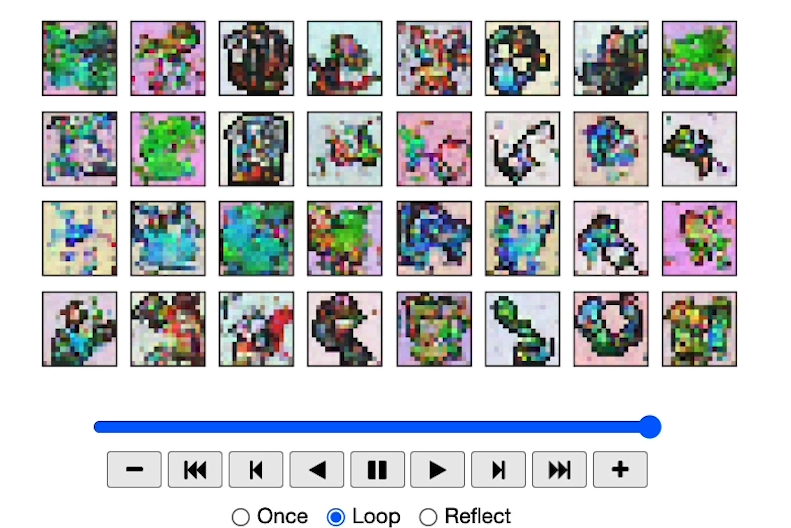
View Epoch 8
# load in model weights and set to eval mode
nn_model.load_state_dict(torch.load(f"{save_dir}/model_8.pth", map_location=device))
nn_model.eval()
print("Loaded in Model")# visualize samples
plt.clf()
samples, intermediate_ddpm = sample_ddpm(32)
animation_ddpm = plot_sample(intermediate_ddpm,32,4,save_dir, "ani_run", None, save=False)
HTML(animation_ddpm.to_jshtml())
Output

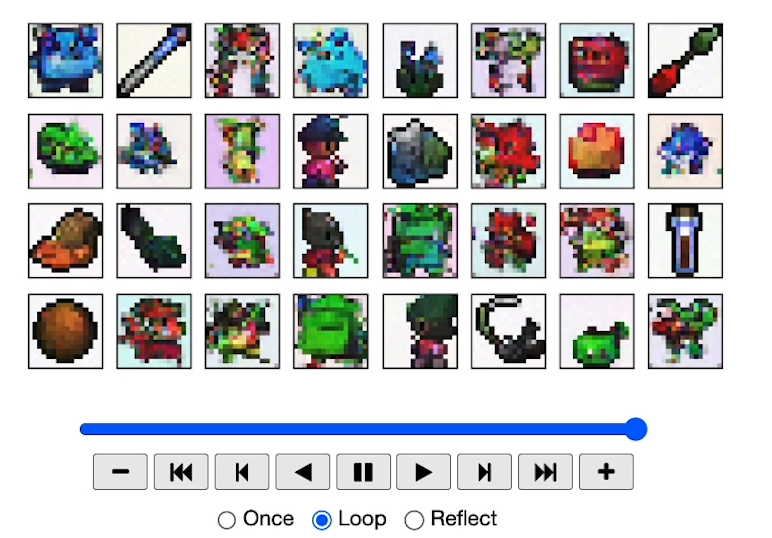
View Epoch 31
# load in model weights and set to eval mode
nn_model.load_state_dict(torch.load(f"{save_dir}/model_31.pth", map_location=device))
nn_model.eval()
print("Loaded in Model")# visualize samples
plt.clf()
samples, intermediate_ddpm = sample_ddpm(32)
animation_ddpm = plot_sample(intermediate_ddpm,32,4,save_dir, "ani_run", None, save=False)
HTML(animation_ddpm.to_jshtml())
Output
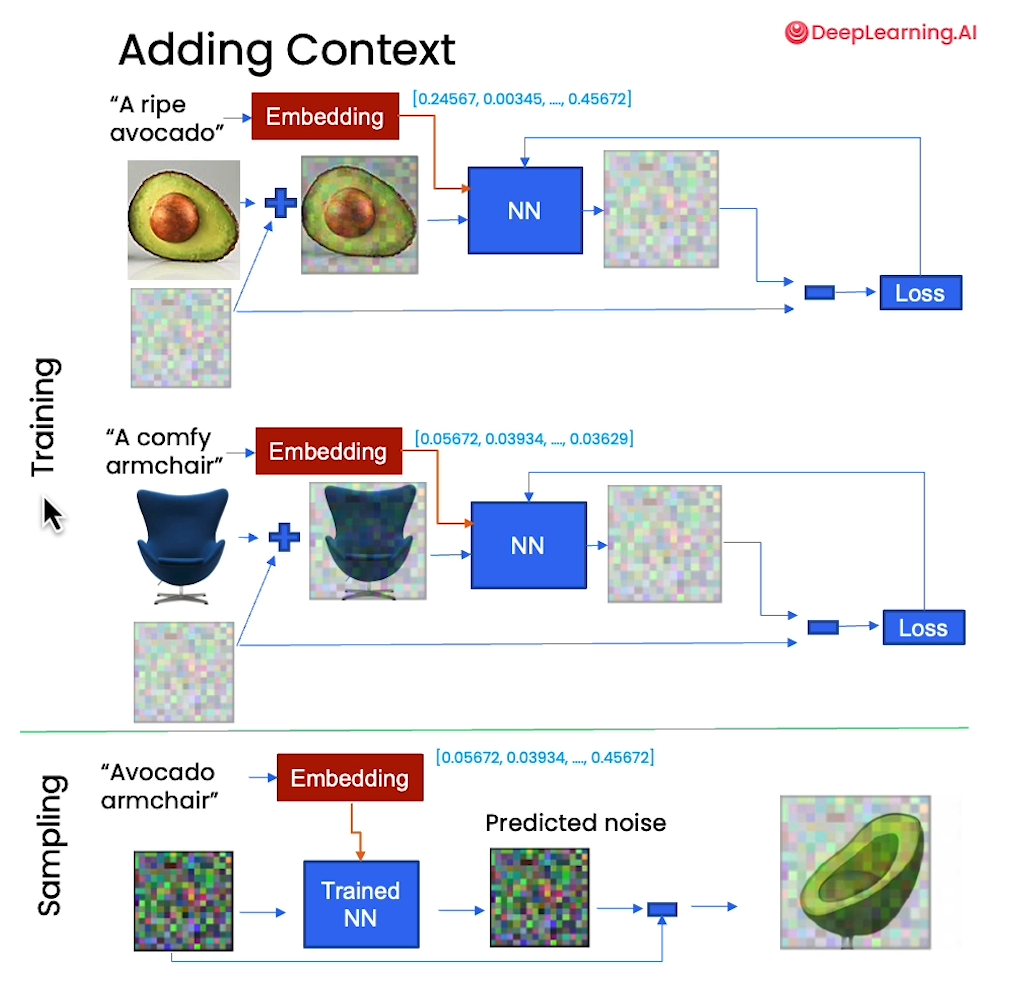
[5] Controlling
from typing import Dict, Tuple
from tqdm import tqdm
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader
from torchvision import models, transforms
from torchvision.utils import save_image, make_grid
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation, PillowWriter
import numpy as np
from IPython.display import HTML
from diffusion_utilities import *
Setting Things Up
class ContextUnet(nn.Module):def __init__(self, in_channels, n_feat=256, n_cfeat=10, height=28): # cfeat - context featuressuper(ContextUnet, self).__init__()# number of input channels, number of intermediate feature maps and number of classesself.in_channels = in_channelsself.n_feat = n_featself.n_cfeat = n_cfeatself.h = height #assume h == w. must be divisible by 4, so 28,24,20,16...# Initialize the initial convolutional layerself.init_conv = ResidualConvBlock(in_channels, n_feat, is_res=True)# Initialize the down-sampling path of the U-Net with two levelsself.down1 = UnetDown(n_feat, n_feat) # down1 #[10, 256, 8, 8]self.down2 = UnetDown(n_feat, 2 * n_feat) # down2 #[10, 256, 4, 4]# original: self.to_vec = nn.Sequential(nn.AvgPool2d(7), nn.GELU())self.to_vec = nn.Sequential(nn.AvgPool2d((4)), nn.GELU())# Embed the timestep and context labels with a one-layer fully connected neural networkself.timeembed1 = EmbedFC(1, 2*n_feat)self.timeembed2 = EmbedFC(1, 1*n_feat)self.contextembed1 = EmbedFC(n_cfeat, 2*n_feat)self.contextembed2 = EmbedFC(n_cfeat, 1*n_feat)# Initialize the up-sampling path of the U-Net with three levelsself.up0 = nn.Sequential(nn.ConvTranspose2d(2 * n_feat, 2 * n_feat, self.h//4, self.h//4), # up-sample nn.GroupNorm(8, 2 * n_feat), # normalize nn.ReLU(),)self.up1 = UnetUp(4 * n_feat, n_feat)self.up2 = UnetUp(2 * n_feat, n_feat)# Initialize the final convolutional layers to map to the same number of channels as the input imageself.out = nn.Sequential(nn.Conv2d(2 * n_feat, n_feat, 3, 1, 1), # reduce number of feature maps #in_channels, out_channels, kernel_size, stride=1, padding=0nn.GroupNorm(8, n_feat), # normalizenn.ReLU(),nn.Conv2d(n_feat, self.in_channels, 3, 1, 1), # map to same number of channels as input)def forward(self, x, t, c=None):"""x : (batch, n_feat, h, w) : input imaget : (batch, n_cfeat) : time stepc : (batch, n_classes) : context label"""# x is the input image, c is the context label, t is the timestep, context_mask says which samples to block the context on# pass the input image through the initial convolutional layerx = self.init_conv(x)# pass the result through the down-sampling pathdown1 = self.down1(x) #[10, 256, 8, 8]down2 = self.down2(down1) #[10, 256, 4, 4]# convert the feature maps to a vector and apply an activationhiddenvec = self.to_vec(down2)# mask out context if context_mask == 1if c is None:c = torch.zeros(x.shape[0], self.n_cfeat).to(x)# embed context and timestepcemb1 = self.contextembed1(c).view(-1, self.n_feat * 2, 1, 1) # (batch, 2*n_feat, 1,1)temb1 = self.timeembed1(t).view(-1, self.n_feat * 2, 1, 1)cemb2 = self.contextembed2(c).view(-1, self.n_feat, 1, 1)temb2 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)#print(f"uunet forward: cemb1 {cemb1.shape}. temb1 {temb1.shape}, cemb2 {cemb2.shape}. temb2 {temb2.shape}")up1 = self.up0(hiddenvec)up2 = self.up1(cemb1*up1 + temb1, down2) # add and multiply embeddingsup3 = self.up2(cemb2*up2 + temb2, down1)out = self.out(torch.cat((up3, x), 1))return out# hyperparameters# diffusion hyperparameters
timesteps = 500
beta1 = 1e-4
beta2 = 0.02# network hyperparameters
device = torch.device("cuda:0" if torch.cuda.is_available() else torch.device('cpu'))
n_feat = 64 # 64 hidden dimension feature
n_cfeat = 5 # context vector is of size 5
height = 16 # 16x16 image
save_dir = './weights/'# training hyperparameters
batch_size = 100
n_epoch = 32
lrate=1e-3
# construct DDPM noise schedule
b_t = (beta2 - beta1) * torch.linspace(0, 1, timesteps + 1, device=device) + beta1
a_t = 1 - b_t
ab_t = torch.cumsum(a_t.log(), dim=0).exp()
ab_t[0] = 1# construct model
nn_model = ContextUnet(in_channels=3, n_feat=n_feat, n_cfeat=n_cfeat, height=height).to(device)
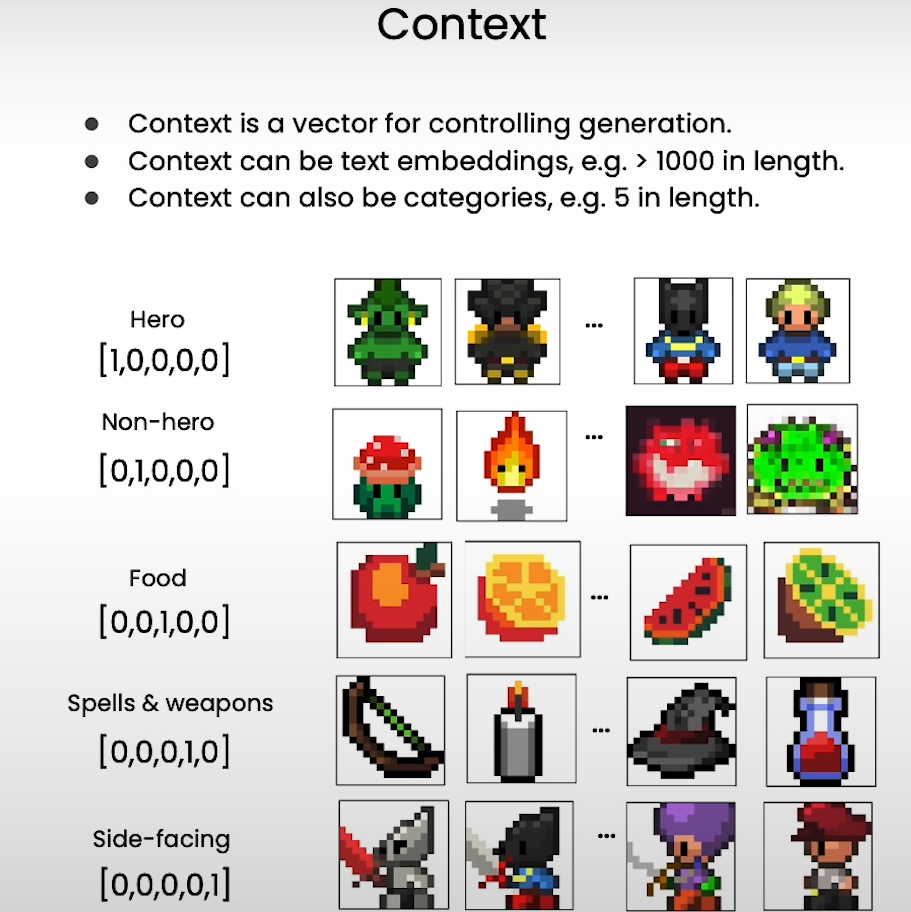
Context
# reset neural network
nn_model = ContextUnet(in_channels=3, n_feat=n_feat, n_cfeat=n_cfeat, height=height).to(device)# re setup optimizer
optim = torch.optim.Adam(nn_model.parameters(), lr=lrate)
# training with context code
# set into train mode
nn_model.train()for ep in range(n_epoch):print(f'epoch {ep}')# linearly decay learning rateoptim.param_groups[0]['lr'] = lrate*(1-ep/n_epoch)pbar = tqdm(dataloader, mininterval=2 )for x, c in pbar: # x: images c: contextoptim.zero_grad()x = x.to(device)c = c.to(x)# randomly mask out ccontext_mask = torch.bernoulli(torch.zeros(c.shape[0]) + 0.9).to(device)c = c * context_mask.unsqueeze(-1)# perturb datanoise = torch.randn_like(x)t = torch.randint(1, timesteps + 1, (x.shape[0],)).to(device) x_pert = perturb_input(x, t, noise)# use network to recover noisepred_noise = nn_model(x_pert, t / timesteps, c=c)# loss is mean squared error between the predicted and true noiseloss = F.mse_loss(pred_noise, noise)loss.backward()optim.step()# save model periodicallyif ep%4==0 or ep == int(n_epoch-1):if not os.path.exists(save_dir):os.mkdir(save_dir)torch.save(nn_model.state_dict(), save_dir + f"context_model_{ep}.pth")print('saved model at ' + save_dir + f"context_model_{ep}.pth")
# load in pretrain model weights and set to eval mode
nn_model.load_state_dict(torch.load(f"{save_dir}/context_model_trained.pth", map_location=device))
nn_model.eval()
print("Loaded in Context Model")
Sampling with context
# helper function; removes the predicted noise (but adds some noise back in to avoid collapse)
def denoise_add_noise(x, t, pred_noise, z=None):if z is None:z = torch.randn_like(x)noise = b_t.sqrt()[t] * zmean = (x - pred_noise * ((1 - a_t[t]) / (1 - ab_t[t]).sqrt())) / a_t[t].sqrt()return mean + noise
# sample with context using standard algorithm
@torch.no_grad()
def sample_ddpm_context(n_sample, context, save_rate=20):# x_T ~ N(0, 1), sample initial noisesamples = torch.randn(n_sample, 3, height, height).to(device) # array to keep track of generated steps for plottingintermediate = [] for i in range(timesteps, 0, -1):print(f'sampling timestep {i:3d}', end='\r')# reshape time tensort = torch.tensor([i / timesteps])[:, None, None, None].to(device)# sample some random noise to inject back in. For i = 1, don't add back in noisez = torch.randn_like(samples) if i > 1 else 0eps = nn_model(samples, t, c=context) # predict noise e_(x_t,t, ctx)samples = denoise_add_noise(samples, i, eps, z)if i % save_rate==0 or i==timesteps or i<8:intermediate.append(samples.detach().cpu().numpy())intermediate = np.stack(intermediate)return samples, intermediate
# visualize samples with randomly selected context
plt.clf()
ctx = F.one_hot(torch.randint(0, 5, (32,)), 5).to(device=device).float()
samples, intermediate = sample_ddpm_context(32, ctx)
animation_ddpm_context = plot_sample(intermediate,32,4,save_dir, "ani_run", None, save=False)
HTML(animation_ddpm_context.to_jshtml())
Output
def show_images(imgs, nrow=2):_, axs = plt.subplots(nrow, imgs.shape[0] // nrow, figsize=(4,2 ))axs = axs.flatten()for img, ax in zip(imgs, axs):img = (img.permute(1, 2, 0).clip(-1, 1).detach().cpu().numpy() + 1) / 2ax.set_xticks([])ax.set_yticks([])ax.imshow(img)plt.show()
# user defined context
ctx = torch.tensor([# hero, non-hero, food, spell, side-facing[1,0,0,0,0], [1,0,0,0,0], [0,0,0,0,1],[0,0,0,0,1], [0,1,0,0,0],[0,1,0,0,0],[0,0,1,0,0],[0,0,1,0,0],
]).float().to(device)
samples, _ = sample_ddpm_context(ctx.shape[0], ctx)
show_images(samples)
Output
# mix of defined context
ctx = torch.tensor([# hero, non-hero, food, spell, side-facing[1,0,0,0,0], #human[1,0,0.6,0,0], [0,0,0.6,0.4,0], [1,0,0,0,1], [1,1,0,0,0],[1,0,0,1,0]
]).float().to(device)
samples, _ = sample_ddpm_context(ctx.shape[0], ctx)
show_images(samples)
Output
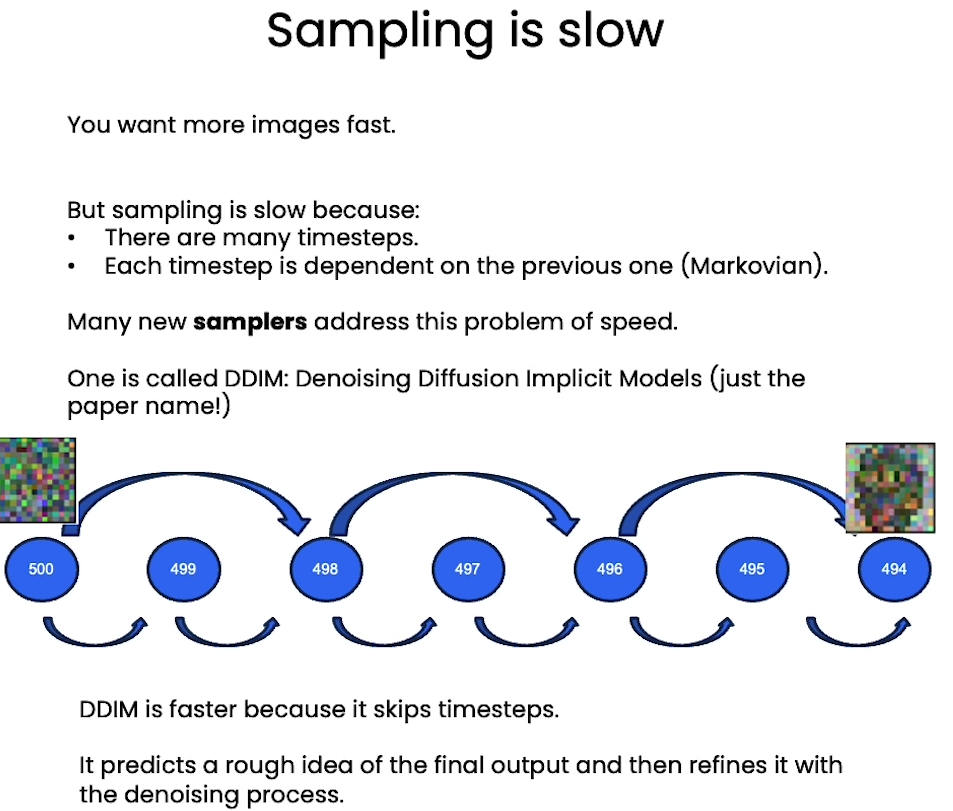
[6] Speeding up
DDIM
DDIM: Denoising Diffusion Implicit Models
from typing import Dict, Tuple
from tqdm import tqdm
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader
from torchvision import models, transforms
from torchvision.utils import save_image, make_grid
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation, PillowWriter
import numpy as np
from IPython.display import HTML
from diffusion_utilities import *
Setting Things Up
class ContextUnet(nn.Module):def __init__(self, in_channels, n_feat=256, n_cfeat=10, height=28): # cfeat - context featuressuper(ContextUnet, self).__init__()# number of input channels, number of intermediate feature maps and number of classesself.in_channels = in_channelsself.n_feat = n_featself.n_cfeat = n_cfeatself.h = height #assume h == w. must be divisible by 4, so 28,24,20,16...# Initialize the initial convolutional layerself.init_conv = ResidualConvBlock(in_channels, n_feat, is_res=True)# Initialize the down-sampling path of the U-Net with two levelsself.down1 = UnetDown(n_feat, n_feat) # down1 #[10, 256, 8, 8]self.down2 = UnetDown(n_feat, 2 * n_feat) # down2 #[10, 256, 4, 4]# original: self.to_vec = nn.Sequential(nn.AvgPool2d(7), nn.GELU())self.to_vec = nn.Sequential(nn.AvgPool2d((4)), nn.GELU())# Embed the timestep and context labels with a one-layer fully connected neural networkself.timeembed1 = EmbedFC(1, 2*n_feat)self.timeembed2 = EmbedFC(1, 1*n_feat)self.contextembed1 = EmbedFC(n_cfeat, 2*n_feat)self.contextembed2 = EmbedFC(n_cfeat, 1*n_feat)# Initialize the up-sampling path of the U-Net with three levelsself.up0 = nn.Sequential(nn.ConvTranspose2d(2 * n_feat, 2 * n_feat, self.h//4, self.h//4), nn.GroupNorm(8, 2 * n_feat), # normalize nn.ReLU(),)self.up1 = UnetUp(4 * n_feat, n_feat)self.up2 = UnetUp(2 * n_feat, n_feat)# Initialize the final convolutional layers to map to the same number of channels as the input imageself.out = nn.Sequential(nn.Conv2d(2 * n_feat, n_feat, 3, 1, 1), # reduce number of feature maps #in_channels, out_channels, kernel_size, stride=1, padding=0nn.GroupNorm(8, n_feat), # normalizenn.ReLU(),nn.Conv2d(n_feat, self.in_channels, 3, 1, 1), # map to same number of channels as input)def forward(self, x, t, c=None):"""x : (batch, n_feat, h, w) : input imaget : (batch, n_cfeat) : time stepc : (batch, n_classes) : context label"""# x is the input image, c is the context label, t is the timestep, context_mask says which samples to block the context on# pass the input image through the initial convolutional layerx = self.init_conv(x)# pass the result through the down-sampling pathdown1 = self.down1(x) #[10, 256, 8, 8]down2 = self.down2(down1) #[10, 256, 4, 4]# convert the feature maps to a vector and apply an activationhiddenvec = self.to_vec(down2)# mask out context if context_mask == 1if c is None:c = torch.zeros(x.shape[0], self.n_cfeat).to(x)# embed context and timestepcemb1 = self.contextembed1(c).view(-1, self.n_feat * 2, 1, 1) # (batch, 2*n_feat, 1,1)temb1 = self.timeembed1(t).view(-1, self.n_feat * 2, 1, 1)cemb2 = self.contextembed2(c).view(-1, self.n_feat, 1, 1)temb2 = self.timeembed2(t).view(-1, self.n_feat, 1, 1)#print(f"uunet forward: cemb1 {cemb1.shape}. temb1 {temb1.shape}, cemb2 {cemb2.shape}. temb2 {temb2.shape}")up1 = self.up0(hiddenvec)up2 = self.up1(cemb1*up1 + temb1, down2) # add and multiply embeddingsup3 = self.up2(cemb2*up2 + temb2, down1)out = self.out(torch.cat((up3, x), 1))return out# hyperparameters# diffusion hyperparameters
timesteps = 500
beta1 = 1e-4
beta2 = 0.02# network hyperparameters
device = torch.device("cuda:0" if torch.cuda.is_available() else torch.device('cpu'))
n_feat = 64 # 64 hidden dimension feature
n_cfeat = 5 # context vector is of size 5
height = 16 # 16x16 image
save_dir = './weights/'# training hyperparameters
batch_size = 100
n_epoch = 32
lrate=1e-3
# construct DDPM noise schedule
b_t = (beta2 - beta1) * torch.linspace(0, 1, timesteps + 1, device=device) + beta1
a_t = 1 - b_t
ab_t = torch.cumsum(a_t.log(), dim=0).exp()
ab_t[0] = 1
# construct model
nn_model = ContextUnet(in_channels=3, n_feat=n_feat, n_cfeat=n_cfeat, height=height).to(device)
Fast Sampling
# define sampling function for DDIM
# removes the noise using ddim
def denoise_ddim(x, t, t_prev, pred_noise):ab = ab_t[t]ab_prev = ab_t[t_prev]x0_pred = ab_prev.sqrt() / ab.sqrt() * (x - (1 - ab).sqrt() * pred_noise)dir_xt = (1 - ab_prev).sqrt() * pred_noisereturn x0_pred + dir_xt
# load in model weights and set to eval mode
nn_model.load_state_dict(torch.load(f"{save_dir}/model_31.pth", map_location=device))
nn_model.eval()
print("Loaded in Model without context")
# sample quickly using DDIM
@torch.no_grad()
def sample_ddim(n_sample, n=20):# x_T ~ N(0, 1), sample initial noisesamples = torch.randn(n_sample, 3, height, height).to(device) # array to keep track of generated steps for plottingintermediate = [] step_size = timesteps // nfor i in range(timesteps, 0, -step_size):print(f'sampling timestep {i:3d}', end='\r')# reshape time tensort = torch.tensor([i / timesteps])[:, None, None, None].to(device)eps = nn_model(samples, t) # predict noise e_(x_t,t)samples = denoise_ddim(samples, i, i - step_size, eps)intermediate.append(samples.detach().cpu().numpy())intermediate = np.stack(intermediate)return samples, intermediate
# visualize samples
plt.clf()
samples, intermediate = sample_ddim(32, n=25)
animation_ddim = plot_sample(intermediate,32,4,save_dir, "ani_run", None, save=False)
HTML(animation_ddim.to_jshtml())
Output

# load in model weights and set to eval mode
nn_model.load_state_dict(torch.load(f"{save_dir}/context_model_31.pth", map_location=device))
nn_model.eval()
print("Loaded in Context Model")
# fast sampling algorithm with context
@torch.no_grad()
def sample_ddim_context(n_sample, context, n=20):# x_T ~ N(0, 1), sample initial noisesamples = torch.randn(n_sample, 3, height, height).to(device) # array to keep track of generated steps for plottingintermediate = [] step_size = timesteps // nfor i in range(timesteps, 0, -step_size):print(f'sampling timestep {i:3d}', end='\r')# reshape time tensort = torch.tensor([i / timesteps])[:, None, None, None].to(device)eps = nn_model(samples, t, c=context) # predict noise e_(x_t,t)samples = denoise_ddim(samples, i, i - step_size, eps)intermediate.append(samples.detach().cpu().numpy())intermediate = np.stack(intermediate)return samples, intermediate
# visualize samples
plt.clf()
ctx = F.one_hot(torch.randint(0, 5, (32,)), 5).to(device=device).float()
samples, intermediate = sample_ddim_context(32, ctx)
animation_ddpm_context = plot_sample(intermediate,32,4,save_dir, "ani_run", None, save=False)
HTML(animation_ddpm_context.to_jshtml())
Output

Compare DDPM, DDIM speed
# helper function; removes the predicted noise (but adds some noise back in to avoid collapse)
def denoise_add_noise(x, t, pred_noise, z=None):if z is None:z = torch.randn_like(x)noise = b_t.sqrt()[t] * zmean = (x - pred_noise * ((1 - a_t[t]) / (1 - ab_t[t]).sqrt())) / a_t[t].sqrt()return mean + noise
# sample using standard algorithm
@torch.no_grad()
def sample_ddpm(n_sample, save_rate=20):# x_T ~ N(0, 1), sample initial noisesamples = torch.randn(n_sample, 3, height, height).to(device) # array to keep track of generated steps for plottingintermediate = [] for i in range(timesteps, 0, -1):print(f'sampling timestep {i:3d}', end='\r')# reshape time tensort = torch.tensor([i / timesteps])[:, None, None, None].to(device)# sample some random noise to inject back in. For i = 1, don't add back in noisez = torch.randn_like(samples) if i > 1 else 0eps = nn_model(samples, t) # predict noise e_(x_t,t)samples = denoise_add_noise(samples, i, eps, z)if i % save_rate ==0 or i==timesteps or i<8:intermediate.append(samples.detach().cpu().numpy())intermediate = np.stack(intermediate)return samples, intermediate
%timeit -r 1 sample_ddim(32, n=25)
%timeit -r 1 sample_ddpm(32, )
Output

后记
经过2天的时间,大概2小时,完成这门课的学习。代码是给定的,所以没有自己写代码的过程,但是让我对扩散模型有了一定的了解,想要更深入的理解扩散模型,还是需要阅读论文和相关资料。这门课仅仅是入门课。
这篇关于从零开始学习Diffusion Models: Sharon Zhou的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








