本文主要是介绍Guided Filter 引导滤波,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
双边滤波
双边滤波很有名,使用广泛,简单的说就是一种同时考虑了像素空间差异与强度差异的滤波器,因此具有保持图像边缘的特性。
先看看我们熟悉的高斯滤波器
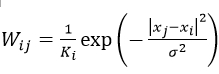
其中W是权重,i和j是像素索引,K是归一化常量。公式中可以看出,权重只和像素之间的空间距离有关系,无论图像的内容是什么,都有相同的滤波效果。
再来看看双边滤波器,它只是在原有高斯函数的基础上加了一项,如下
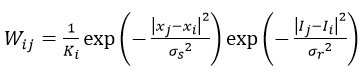
其中 I 是像素的强度值,所以在强度差距大的地方(边缘),权重会减小,滤波效应也就变小。总体而言,在像素强度变换不大的区域,双边滤波有类似于高斯滤波的效果,而在图像边缘等强度梯度较大的地方,可以保持梯度。
引导滤波
引导滤波是近三年才出现的滤波技术,知道的人还不多。它与双边滤波最大的相似之处,就是同样具有保持边缘特性。在引导滤波的定义中,用到了局部线性模型,至于该模型,可以暂时用下图简单的理解
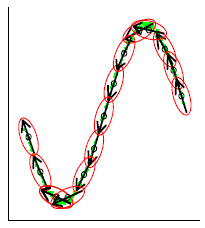
该模型认为,某函数上一点与其邻近部分的点成线性关系,一个复杂的函数就可以用很多局部的线性函数来表示,当需要求该函数上某一点的值时,只需计算所有包含该点的线性函数的值并做平均即可。这种模型,在表示非解析函数上,非常有用。
同理,我们可以认为图像是一个二维函数,而且没法写出解析表达式,因此我们假设该函数的输出与输入在一个二维窗口内满足线性关系,如下

其中,q是输出像素的值,I是输入图像的值,i和k是像素索引,a和b是当窗口中心位于k时该线性函数的系数。其实,输入图像不一定是待滤波的图像本身,也可以是其他图像即引导图像,这也是为何称为引导滤波的原因。对上式两边取梯度,可以得到
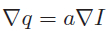
即当输入图像I有梯度时,输出q也有类似的梯度,现在可以解释为什么引导滤波有边缘保持特性了。
下一步是求出线性函数的系数,也就是线性回归,即希望拟合函数的输出值与真实值p之间的差距最小,也就是让下式最小

这里p只能是待滤波图像,并不像I那样可以是其他图像。同时,a之前的系数(以后都写为e)用于防止求得的a过大,也是调节滤波器滤波效果的重要参数。通过最小二乘法,我们可以得到
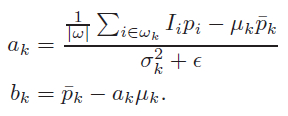
其中,



在计算每个窗口的线性系数时,我们可以发现一个像素会被多个窗口包含,也就是说,每个像素都由多个线性函数所描述。因此,如之前所说,要具体求某一点的输出值时,只需将所有包含该点的线性函数值平均即可,如下
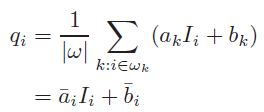
这里,w_k是所有包含像素i的窗口,k是其中心位置。
当把引导滤波用作边缘保持滤波器时,往往有 I = p ,如果e=0,显然a=1, b=0是E(a,b)为最小值的解,从上式可以看出,这时的滤波器没有任何作用,将输入原封不动的输出。如果e>0,在像素强度变化小的区域(或单色区域),有a近似于(或等于)0,而b近似于(或等于)
在滤波效果上,引导滤波和双边滤波差不多,在一些细节上,引导滤波较好。引导滤波最大的优势在于,可以写出时间复杂度与窗口大小无关的算法(打算在之后的文章中讨论),因此在使用大窗口处理图片时,其效率更高。
关于引导滤波更多的讨论和应用,可以参看下面的论文
GuidedFilter_ECCV10.pdf
原创地址
http://blog.csdn.net/aichipmunk/article/details/20704681
这篇关于Guided Filter 引导滤波的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!