本文主要是介绍4.2 比多数opencv函数效果更好的二值化(python),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在这里之间写代码:
import numpy as np
import torch
import torch.nn as nn
import cv2#1.silu激活函数
class SiLU(nn.Module):@staticmethoddef forward(x):return x*torch.sigmoid(x)#2.获得轨道的类
def railway_classes3(img,x1,x2,y1,y2):img2 = img[x1:x2, y1:y2, :]return img2class Conv(nn.Module):def __init__(self):super(Conv, self).__init__()#标准化加激活函数self.bn = nn.BatchNorm2d(3)#标准化self.act = SiLU()def forward(self,x):#x=self.conv(x)x=self.bn(x)x= self.act(x)return xif __name__ == "__main__":#输入图片路径image=cv2.imread(r"imgs/000002.jpg")img2=railway_classes3(image, x1=640, x2=740, y1=825, y2=1025)cv2.imshow("ss",img2)cv2.waitKey(0)cv2.imwrite("imgs/00.jpg",img2)images = img2.reshape(1, 3, img2.shape[0], img2.shape[1])data = torch.tensor(images)datas = torch.tensor(images, dtype=torch.float32)sp=Conv()output=sp(datas)ar=output.detach().numpy()result=ar.reshape(img2.shape[0], img2.shape[1],3)print(result)#图片处理for i in range(result.shape[0]):for j in range(1,result.shape[1]-2):ss1 = result[i, j - 1:j + 2,:].mean()m = result[i][j].mean() - ss1if m >= ss1:print(ss1)img2[i][j] = 255else:img2[i][j] = 0img2[:, -3:] = 0img2[:, :3] = 0cv2.imshow("ss", img2)cv2.waitKey(0)处理效果如下:
第一张光线比较强的图片:
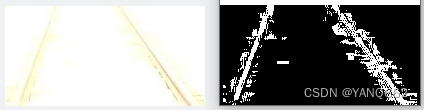
原图 二值化图
第二张光线比较暗的图
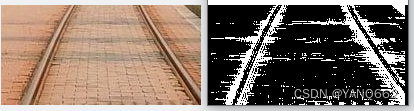
原图 二值化图
以上图片处理的方式用了BatchNorm处理和Xsilu处理,最后感觉这种效果还可以,尤其是在强光下的效果。
2.用普通的计算方法代码如下:
import numpy as np
import cv2
import time
import oscolors = [ (0, 0, 0), (128, 0, 0), (0, 128, 0), (128, 128, 0), (0, 0, 128), (128, 0, 128), (0, 128, 128),(128, 128, 128), (64, 0, 0), (192, 0, 0), (64, 128, 0), (192, 128, 0), (64, 0, 128), (192, 0, 128),(64, 128, 128), (192, 128, 128), (0, 64, 0), (128, 64, 0), (0, 192, 0), (128, 192, 0), (0, 64, 128),(128, 64, 12)]def cluster(points, radius=100):"""points: pointcloudradius: max cluster range"""print("................", len(points))items = []while len(points)>1:item = np.array([points[0]])base = points[0]points = np.delete(points, 0, 0)distance = (points[:,0]-base[0])**2+(points[:,1]-base[1])**2#获得距离infected_points = np.where(distance <= radius**2)#与base距离小于radius**2的点的坐标item = np.append(item, points[infected_points], axis=0)border_points = points[infected_points]points = np.delete(points, infected_points, 0)while len(border_points) > 0:border_base = border_points[0]border_points = np.delete(border_points, 0, 0)border_distance = (points[:,0]-border_base[0])**2+(points[:,1]-border_base[1])**2border_infected_points = np.where(border_distance <= radius**2)#print("/",border_infected_points)item = np.append(item, points[border_infected_points], axis=0)if len(border_infected_points)>0:for k in border_infected_points:if points[k] not in border_points:border_points=np.append(border_points,points[k], axis=0)#border_points = points[border_infected_points]points = np.delete(points, border_infected_points, 0)items.append(item)return items#2.获得轨道的类
def railway_classes(img,x1,x2,y1,y2):img2 = img[x1:x2, y1:y2, :] # [540:741, 810:1080],截取轨道画线的区域,对该区域识别轨道print("img2:", img2.shape)dst = np.zeros((img2.shape[0], img2.shape[1]), np.uint8)for i in range(img2.shape[0]):for j in range(2, img2.shape[1] - 2):z = img2[i, j - 2:j + 2]# print(z)a_z = np.average(z, axis=0) # 按列求均值# print(a_z)m = abs(img2[i][j] - a_z).max()# print(m)if m > 12:dst[i][j] = 255else:dst[i][j] = 0cv2.imshow("ss", dst)cv2.waitKey(0)img2=dst# cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\dbscan\img\\170.jpg", img2)# 3.腐蚀膨胀消除轨道线外的点kernel = np.uint8(np.ones((5, 1)))# 膨胀图像.....为了使得轨道线更粗,且补足轨道线缺失的地方dilated = cv2.dilate(img2, kernel)kernel = np.ones((2, 3), np.uint8)dilated = cv2.erode(dilated, kernel)#ss=np.argwhere(dilated >0)#dilated# cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\dbscan\img\\120.jpg",dilated)cv2.imshow("ss", dilated)cv2.waitKey(0)#聚类算法t1=time.time()items = cluster(ss, radius=3)i=0out=[]#获得大于300个坐标的类for item in items:if len(item)>180:out.append(item)for k in item:img[k[0]+x1][k[1]+y1]=colors[i]i+=1t2=time.time()print("dbscan消耗时间:",t2-t1)cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\dbscan\img\\0.jpg", img)return out#2.获得轨道的类
def railway_classes2(img,x1,x2,y1,y2):img2 = img[x1:x2, y1:y2, :] # [540:741, 810:1080],截取轨道画线的区域,对该区域识别轨道print("img2:", img2.shape)dst = np.zeros((img2.shape[0], img2.shape[1]), np.uint8)for i in range(img2.shape[0]):for j in range(2, img2.shape[1] - 2):z = img2[i, j - 2:j + 2]# print(z)a_z = np.average(z, axis=0) # 按列求均值# print(a_z)m = abs(img2[i][j] - a_z).max()# print(m)if m > 12:dst[i][j] = 255else:dst[i][j] = 0cv2.imshow("ss", dst)cv2.waitKey(0)img2=dst# cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\dbscan\img\\170.jpg", img2)# 3.腐蚀膨胀消除轨道线外的点kernel = np.uint8(np.ones((5, 1)))# 膨胀图像.....为了使得轨道线更粗,且补足轨道线缺失的地方dilated = cv2.dilate(img2, kernel)kernel = np.ones((2, 3), np.uint8)dilated = cv2.erode(dilated, kernel)#ss=np.argwhere(dilated >0)#dilated# cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\dbscan\img\\120.jpg",dilated)cv2.imshow("ss", dilated)cv2.waitKey(0)#聚类算法t1=time.time()items = cluster(ss, radius=3)i=0out=[]#获得大于300个坐标的类for item in items:if len(item)>80:out.append(item)for k in item:img[k[0]+x1][k[1]+y1]=colors[i]i+=1t2=time.time()print("dbscan消耗时间:",t2-t1)cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\dbscan\img\\0.jpg", img)return out#2.获得轨道的类
def railway_classes3(img,x1,x2,y1,y2):img2 = img[x1:x2, y1:y2, :] # [540:741, 810:1080],截取轨道画线的区域,对该区域识别轨道print("img2:", img2.shape)dst = np.zeros((img2.shape[0], img2.shape[1]), np.uint8)for i in range(img2.shape[0]):for j in range(2, img2.shape[1] - 2):z = img2[i, j - 2:j + 2]# print(z)a_z = np.average(z, axis=0) # 按列求均值# print(a_z)m = abs(img2[i][j] - a_z).max()# print(m)if m > 11:dst[i][j] = 255else:dst[i][j] = 0cv2.imshow("ss", dst)cv2.waitKey(0)img2=dst# cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\dbscan\img\\170.jpg", img2)# # 3.腐蚀膨胀消除轨道线外的点kernel = np.uint8(np.ones((4, 2)))# 膨胀图像.....为了使得轨道线更粗,且补足轨道线缺失的地方dilated = cv2.dilate(img2, kernel)kernel = np.ones((3, 3), np.uint8)dilated = cv2.erode(dilated , kernel)# ## kernel = np.uint8(np.ones((5, 2)))# # 膨胀图像.....为了使得轨道线更粗,且补足轨道线缺失的地方# dilated = cv2.dilate(dilated, kernel)ss=np.argwhere(dilated >0)#dilated# cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\dbscan\img\\120.jpg",dilated)cv2.imshow("ss", dilated)cv2.waitKey(0)#聚类算法t1=time.time()items = cluster(ss, radius=3)i=0out=[]#获得大于300个坐标的类for item in items:if len(item)>80:out.append(item)for k in item:img[k[0]+x1][k[1]+y1]=colors[i]i+=1t2=time.time()print("dbscan消耗时间:",t2-t1)cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\dbscan\img\\0.jpg", img)return out#以15个左右的像素点,将类每个类分为很多个小类画直线
def fenlei(classes,num):class_mean=[]for item in classes:item_classes=[]#获取初始点的值hh=item[:5]y=hh[0][0]x=int(hh[:,-1:].mean())item_classes.append((x, y))item =item[item[:,0].argsort()]#对数据分成很多个段,再while len(item) > num+15:items=item[:num]s1=itemsy10=int(s1[:, :1].mean())x10=int(s1[:,-1:].mean())item_classes.append((x10,y10))item=item[120:]if len(item)>5:s1 = itemy10 = int(s1[:, :1].mean())x10 = int(s1[:, -1:].mean())item_classes.append((x10, y10))class_mean.append(item_classes)all_k=[]for item in class_mean:k_b=[]for i in range(len(item)-1):x10,y10=item[i][0],item[i][1]x20, y20 = item[i+1][0], item[i+1][1]k1=(y10-y20)/(x10-x20+0.00001)b1=y10-k1*x10k_b.append((k1, b1, [y10,y20]))all_k.append(k_b)print(all_k)return all_k#画线
def draw_line(img,all_k,x1,x2,y1,y2):print("......................画直线.............................")for k_b in all_k:ss=np.array(k_b)ks=np.array(ss[:,:1]/len(ss)).sum()*0.5#print(ks)for i in range(len(k_b)):k, b, (y10, y20) = k_b[i]x10 = int((y10 - b) / (k+0.000001))x20 = int((y20 - b) / (k+0.000001))cv2.line(img, (x10 + y1, y10 + x1), (x20 + y1, y20 + x1), (0, 0, 255), 2)cv2.imshow("line_detect_possible_demo", img)cv2.waitKey(0)if __name__ == '__main__':start=time.time()img_paths = r"imgs\000004.jpg"save_paths = r"imgs\20.jpg"img = cv2.imread(img_paths)img2=img.copy()all_class = {}all_class["1"] = []all_class["2"] = []# 第1次*************************************************************************************#获得轨道的类classes=railway_classes(img, x1=680, x2=740, y1=825, y2=1045)## 求第一段的类all_class["1"].append(classes[0])all_class["2"].append(classes[1])start1 = classes[0][:20, 1:].mean() + 825start2 = classes[1][:20, 1:].mean() + 825print(start1, start2)#=============================================================================================================# classes2 = railway_classes2(img, x1=640, x2=680, y1=845, y2=995) ## print("......................................................")# # 求第一段的类# for item in classes2:# # print("start===>",item[:20,1:].mean()+845)# # print("end===>",item[-20:,1:].mean()+845)# if abs((item[-20:, 1:].mean() + 845) - start1) < 10:# np.vstack((all_class["1"][0], item))# start1 = item[:20, 1:].mean() + 845# elif abs((item[-20:, 1:].mean() + 845) - start2) < 10:# np.vstack((all_class["2"][0], item))# start2 = item[:20, 1:].mean() + 845# print(start1, start2)## # =============================================================================================================# classes3 = railway_classes3(img, x1=610, x2=640, y1=855, y2=965) ## print("......................................................")# for item in classes3:# # print("start===>",item[:,1:].mean()+855)# # print("end===>", item[-20:, 1:].mean() + 855)# if abs((item[-20:, 1:].mean() + 855) - start1) < 10:# np.vstack((all_class["1"][0], item))# start1 = item[:20, 1:].mean() + 855# elif abs((item[-20:, 1:].mean() + 855) - start2) < 10:# np.vstack((all_class["2"][0], item))# start2 = item[:20, 1:].mean() + 855# print(start1, start2)ss=[]ss.append(all_class["1"][0])ss.append(all_class["2"][0])print(ss[0])# 以15个左右的像素点,将类每个类分为很多个小类画直线num=100all_k=fenlei(ss,num)#classes## # 画线draw_line(img, all_k, x1=680, x2=740, y1=825, y2=1035)#这篇关于4.2 比多数opencv函数效果更好的二值化(python)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







